

임베디드

산업 제조
드론 설계의 핵심은 모터의 속도와 회전을 제어하는 능력입니다. 대부분의 드론은 속도와 회전 방향을 지속적으로 조절해야 하는 브러시리스 DC 모터로 구동됩니다. ESC(Electronic Speed Control) 모듈은 이러한 기능을 수행하며 전원 공급 단계, 전류 감지 회로, 마이크로 컨트롤러 및 비행 제어 시스템과의 통신 인터페이스를 포함하므로 드론의 기본이 됩니다. 이 기사에서는 ESC와 시장의 개발 솔루션을 설계할 때 고려해야 할 중요한 요소를 살펴봅니다.
모터 제어
ESC의 설계에는 다음과 같이 요약될 수 있는 특성의 신중한 평가와 분석이 필요합니다.
브러시리스 모터는 BLDC(브러시리스 직류 모터)와 BLAC(영구 자석 동기 모터)라고도 하는 두 가지 유형의 브러시리스 모터를 드론에 설치할 수 있습니다. 사용할 모터 유형의 선택은 사다리꼴 제어 또는 FOC(field-oriented control)가 될 수 있는 제어 알고리즘의 영향을 받습니다. 사다리꼴 모터 제어 알고리즘에는 다음과 같은 주요 특성이 있습니다.
반면에 FOC 제어 알고리즘에는 다음과 같은 기능이 있습니다.
센서리스 제어 시스템에서 모터의 자기각은 모터 위상 전압 및 전류로부터 추정됩니다. 위치는 추가 센서를 사용하지 않고 모터의 특정 전기 매개변수를 모니터링하여 결정됩니다. 드론에 가장 많이 사용되는 유형은 브러시리스 DC 모터로, 크기가 작고 가격이 비교적 저렴하며 내구성과 견고성이 우수합니다.
대부분의 드론에는 최소 4개의 모터가 있으며 4개 모터 버전이 가장 많이 사용됩니다. ESC는 각 모터 속도를 제어하는 역할을 하므로 가장 일반적인 드론 아키텍처는 각 모터에 ESC를 전용으로 사용하는 것입니다. 모든 ESC는 드론을 쉽게 제어할 수 있도록 비행 컨트롤러를 통해 직간접적으로 서로 통신할 수 있어야 합니다. 각 모터의 회전 방향도 중요합니다. 쿼드리콥터에서 한 쌍의 모터는 한 방향으로 회전하고 다른 한 쌍은 반대 방향으로 회전합니다.
ESC 제조업체에서 가장 일반적으로 사용하는 모터 제어 기술은 모터 토크와 속도를 제어하는 기술인 필드 지향 제어입니다. 올바르게 구현되면 FOC는 불안정성을 일으키지 않고 급격한 가속 변화를 처리할 수 있어 드론이 효율성을 최대화하면서 복잡한 기동을 수행할 수 있습니다.
아래 그림 1의 블록 다이어그램은 다음 구성 요소를 포함하는 FOC 아키텍처를 보여줍니다.
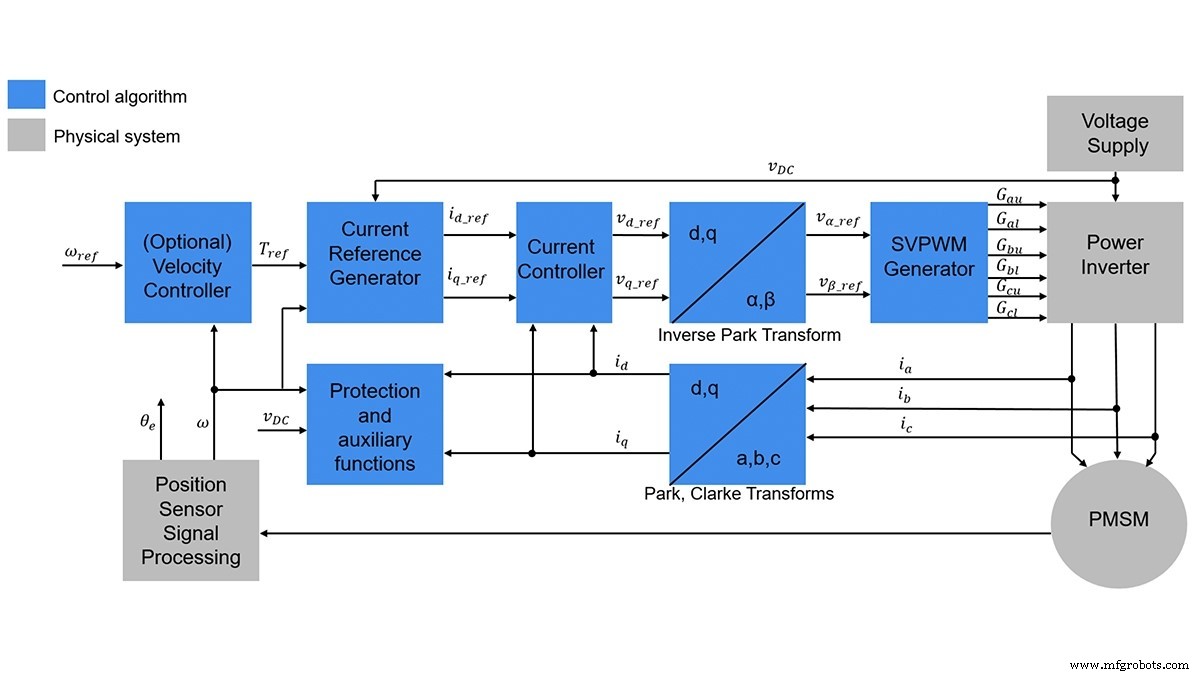
그림 1. 필드 지향 제어의 블록 다이어그램(출처:Mathworks)
FOC를 설계하는 모터 제어 엔지니어는 전류 루프에 대해 2개의 PI 컨트롤러가 있는 컨트롤러 아키텍처 개발, 성능 요구 사항을 충족하기 위해 모든 PI 컨트롤러의 이득 최적화, PWM을 제어하기 위한 공간 벡터 변조기 설계 등 여러 작업을 수행합니다.
제어 알고리즘이 선택되면(사다리꼴 또는 FOC), 다음 단계는 개방 루프 또는 폐쇄 루프 제어 시스템 중에서 선택하는 것입니다. 개루프 제어에서 동기 모터(BLDC 또는 BLAC)는 제어 신호를 통해 구동되며 명령된 제어 동작을 따르는 것으로 간주됩니다. 폐쇄 루프 제어 시스템에서 회로는 모터가 의도한 대로 움직이는지 확인할 수 있습니다. 그렇지 않은 경우 제어 시스템은 전류를 줄이거나 늘려서 과도하거나 부족한 움직임을 자동으로 보상합니다.
폐쇄 루프 또는 개방 루프(센서리스) 제어 시스템을 사용할 때 피드백 신호로 사용하려면 전류와 전압을 측정해야 합니다. 그림 2는 사다리꼴 및 정현파 제어 시스템 모두에 적합한 일반적인 측정 설정을 보여줍니다. 무센서 알고리즘과 사다리꼴 제어를 사용하여 무센서 알고리즘에서 3상 전압을 사용하여 회전자 각도를 계산합니다.
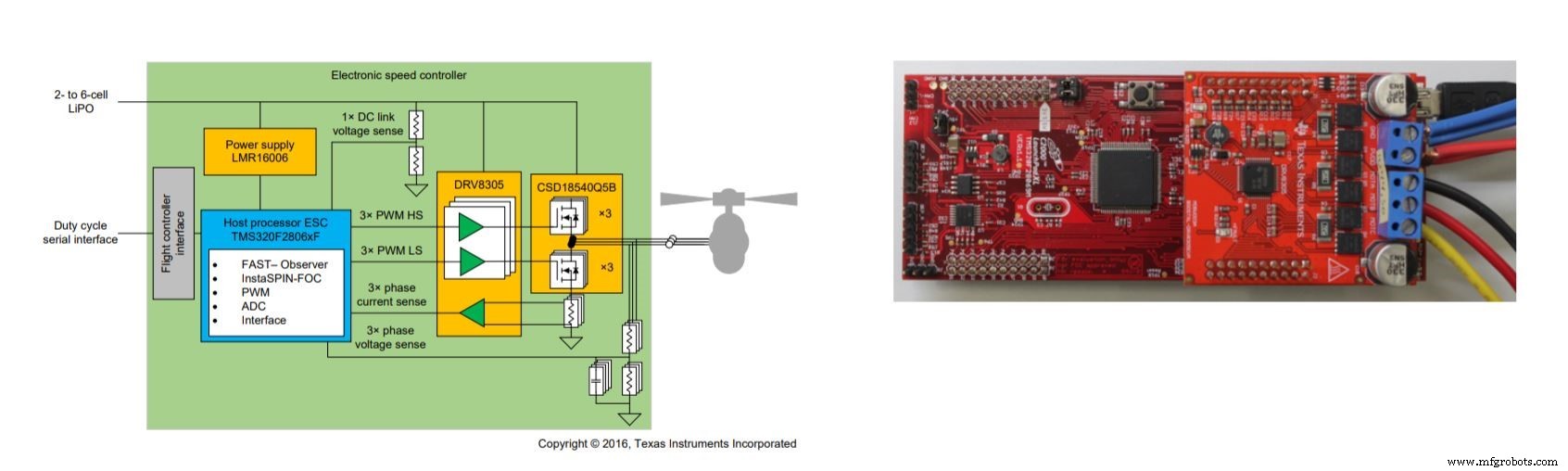
그림 2. 센서리스 모터 제어 기능이 있는 ESC. 오른쪽은 텍사스 인스트루먼트의 드론 ESC용 고속 센서리스-FOC 참조 설계이고, 왼쪽은 블록 다이어그램입니다. (출처:텍사스 인스트루먼트)
쿼드콥터 역학
드론의 기계적 단순성과 공기역학적 안정성은 모터와 그 기동의 조화로운 사용과 관련이 있습니다. 쿼드콥터에서 구조물의 대각선에 위치한 한 쌍의 모터는 같은 방향으로 회전하지만 다른 두 모터와 반대 방향으로 회전합니다. 4개의 모터가 모두 같은 속도로 회전하면 드론이 오르거나 내리거나 수평 비행을 유지할 수 있습니다. 대각선 쌍이 다른 쌍보다 빠르게 회전하면 드론은 무게 중심을 중심으로 회전하고 동일한 수평면에 유지됩니다(그림 3).
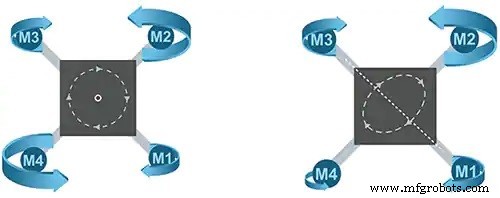
그림 3. 드론은 다양한 로터 속도 조합을 사용하여 기동합니다. (출처:STMicroelectronics)
헤드(또는 테일) 로터의 속도를 변경하면 드론이 고정익 항공기가 잠수하는 것처럼 위 또는 아래를 가리킵니다. 왼쪽 또는 오른쪽 토크를 조정하면 드론이 회전하여 축을 중심으로 회전합니다. 원하는 기동을 완료하는 데 필요한 비행 고도를 달성하기 위해 적절한 로터의 속도를 변경하는 것은 드론의 비행 제어 시스템에 달려 있습니다.
제어 엔지니어의 경우 속도 수정은 PID(비례, 적분, 미분) 컨트롤러로 해결되는 일반적인 제어 루프 피드백 문제입니다.
ESC 설계
드론용 ESC를 설계하려면 고 RPM 모터(12,000+ RPM)를 제어하도록 특별히 설계된 고품질 부품이 필요합니다. Texas Instruments는 3상 모터 제어 애플리케이션의 설계를 단순화하는 InstaSPIN이라는 MCU 제품군을 개발했습니다. 센서리스 시스템에 적합한 InstaSPIN-FOC는 모든 3상 모터에 적합한 토크 및 속도 제어 기능이 있는 빠른 소프트웨어 인코더를 제공합니다. InstaSPIN-MOTION은 센서리스 시스템을 대상으로 하며 모든 3상 모터에 대한 위치, 속도 및 토크 제어를 제공합니다.
이러한 범위에 대한 완전한 참조 설계는 TI에서 제공하며 InstaSPIN-FOC 및 InstaSPIN-MOTION 모터 제어 기술로 구성됩니다. 플랫폼에는 32비트 TI C2000 InstaSPIN 마이크로컨트롤러가 포함되어 있습니다. 이를 통해 개발자는 3상 모터를 식별, 자동 조정 및 제어하여 안정적이고 기능적인 모터 제어 시스템을 신속하게 제공할 수 있습니다.
STMicroelectronics는 센서리스 FOC 알고리즘을 구현하는 완전한 ESC 참조 설계를 제공합니다. STEVAL-ESC001V1 ESC 레퍼런스 디자인은 보급형 상업용 드론 설계에 적합하며 6S LiPo 배터리 팩 또는 이와 동등한 DC 전원 공급 장치로 구동되는 3상 브러시리스 모터(또는 PMSM)를 최대 30A 피크 전류로 구동합니다. STEVAL-ESC001V1을 사용하면 사전 구성된 완전한 펌웨어 패키지(STSW-ESC001V1) 덕분에 설계자가 애플리케이션을 신속하게 개발할 수 있으며, 3 션트 전류 판독, 속도 제어 및 완전 능동 제동이 있는 센서리스 필드 지향 제어 알고리즘을 구현합니다. STSW-ESC001V1 펌웨어/소프트웨어 패키지와 STM32 PMSM FOC 소프트웨어 개발 키트 MC 라이브러리를 사용하면 STM32 MCU에 내장된 FOC 매개변수에 작용하여 ESC 설계를 최적화하고 ST 모터 프로파일러를 활용하여 관련 모터 매개변수를 빠르게 검색할 수 있습니다. ST의 센서리스 FOC 알고리즘은 모든 3상 BLDC 또는 PMSM 모터 애플리케이션에 적용할 수 있어 더 긴 비행 시간과 최적의 동적 성능을 제공합니다(그림 4 및 5).
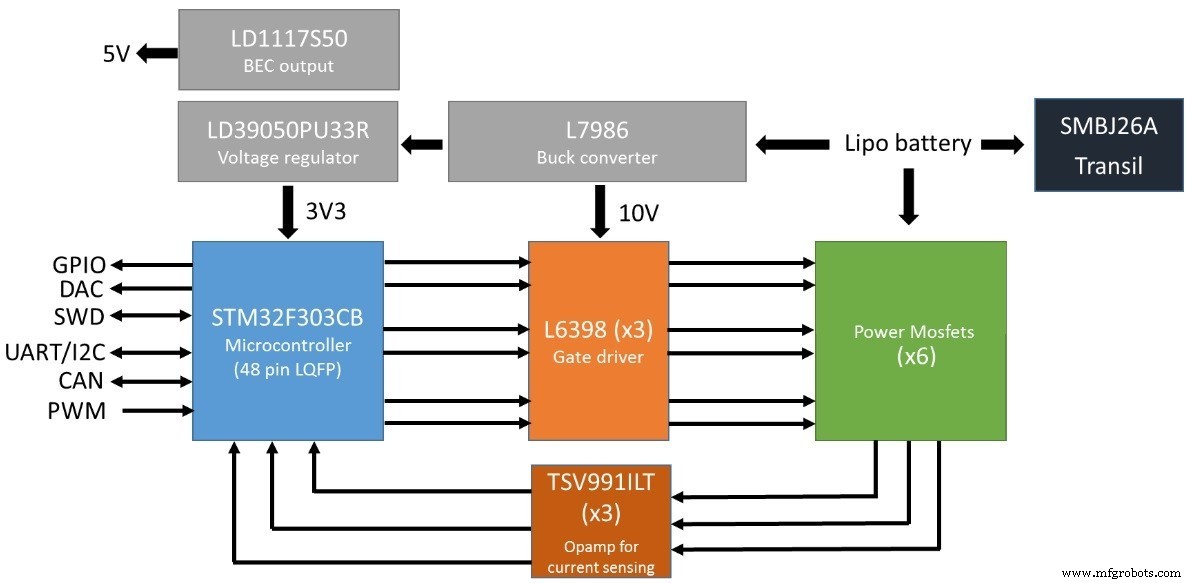
그림 4. ST의 STEVAL-ESC001V1 솔루션의 블록 다이어그램(출처:STMicroelectronics)
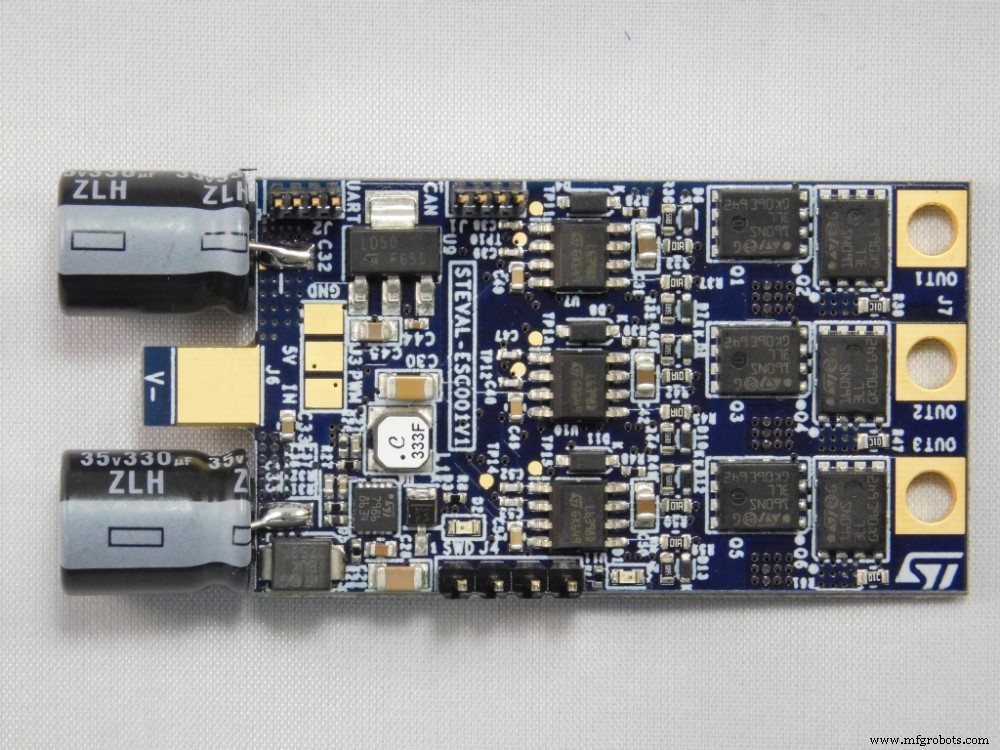
그림 5. ST의 STEVAL-ESC001V1 보드(출처:STMicroelectronics)
HoverGames 드론 개발 플랫폼은 모듈식의 유연한 NXP 하드웨어/소프트웨어 솔루션으로 드론과 로버에서 UAV에 이르기까지 모든 자율 차량을 구축하는 데 사용할 수 있습니다. 개발 키트는 기본적으로 Linux 및 Open CV가 있는 마이크로프로세서와 비행을 안내하는 다양한 동반 센서를 기반으로 합니다.
비행 컨트롤러는 드론이 안정적으로 유지되도록 합니다. 보드는 기능에 따라 작동을 최적화하기 위해 다른 외부 센서를 삽입할 수 있는 오픈 소스입니다.
LiPo 배터리 및 국가별 원격 측정 라디오는 IoT 연결 중 하나를 사용하여 구현해야 합니다. 키트의 전체 기능을 사용하려면 사용 가능한 두 원격 측정 라디오 중 구매할 것을 선택해야 합니다. 원격 측정을 통해 비행 중 차량에 실시간으로 연결하고 비행 중 드론의 상태를 확인하고 자율 웨이포인트를 로드 및 제어하고 필요한 변경을 수행할 수 있습니다. 원격 측정 데이터는 관제소로 전송되지만 기내의 비행 장치에도 저장됩니다.
키트 구성 요소에는 또한 DC-DC 전원 모듈, 마운트가 있는 GPS NEO-M8N 모듈, 안전 스위치, 부저, 밝은 RGB 상태 LED, SEGGER J-Link EDU Mini/FTDI USB-TTL-3V3 케이블/디버그 브레이크아웃 보드(케이블 포함)가 포함됩니다. , BLDC 브러시리스 모터 2212 920kV 및 ESC 모터 컨트롤러 40A OPTO(그림 6).
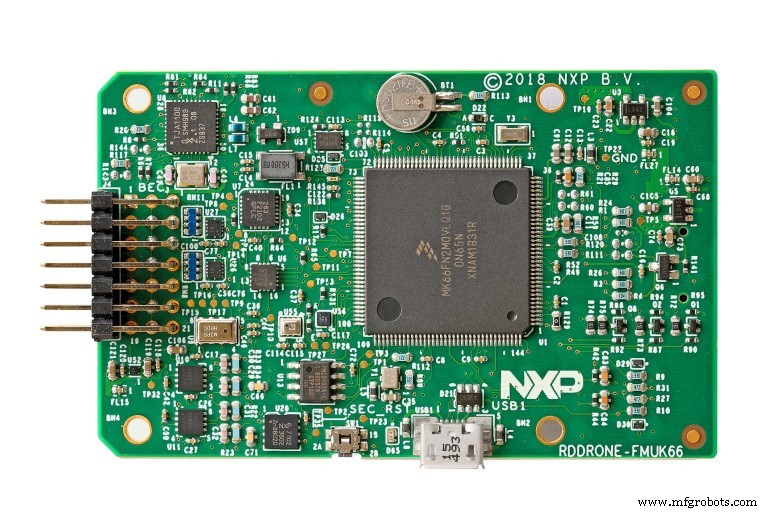
그림 6. RDDRONE-FMUK66 비행 유닛(출처:NXP)
>> 이 기사는 원래 다음 날짜에 게시되었습니다. 자매 사이트인 Power Electronics News.
관련 콘텐츠:
더 많은 Embedded를 보려면 Embedded의 주간 이메일 뉴스레터를 구독하세요.
임베디드
DC 모터의 속도 제어 방법 – 직렬 및 션트 DC 모터의 전압, 가변 저항 및 자속 제어 직류(DC) 전력을 자기장에 의해 생성된 힘을 기반으로 기계적 전력으로 변환하는 데 DC 모터가 사용됩니다. 모터의 출력은 샤프트의 회전(속도) 측면에서 기계적 동력입니다. 응용 프로그램에 따라 모터 속도를 변경해야 합니다. 따라서 의도적인 속도 변경을 모터의 속도 제어라고 합니다. 속도 제어라는 용어는 속도 규제와 다릅니다. 속도 조절이란 부하의 변화에 대해 샤프트의 속도를 일정하게 유지하는 것을 의미합니다. 관련 포스트:DC 머신
모든 기술과 마찬가지로 지능형 자동화는 제대로 관리되지 않으면 효과적일 수 없습니다. 대유행은 주요 글로벌 혼란에 대응하여 민첩성, 속도 및 탄력성을 갖춘 행동의 중요성을 보여주고 있습니다. 또한 분명한 것은 지능형 자동화 기술을 성공적으로 채택하지 않은 조직은 효과적으로 대응하는 데 어려움을 겪고 있다는 것입니다. 최상의 상태에서 지능형 자동화를 통해 프런트, 미들 및 백 오피스에서 훨씬 더 스마트하고 빠르고 효율적으로 작업을 수행할 수 있습니다. 그러나 조직이 비즈니스 프로세스 자동화를 시작할 때 가장 큰 문제 중 하나는 이