

나노물질

산업 제조
이 연구는 산소 플라즈마 처리 기술을 사용하여 PDMS(폴리디메틸실록산) 기판의 양면에 준비된 교차 결합 회절 격자의 사용을 기반으로 하는 다중 자유도 모션 매개변수 측정 방법을 제시합니다. 교차 결합 광학 격자를 통과하는 레이저 빔은 2차원 스폿 어레이로 회절됩니다. 스폿 어레이의 변위와 갭 크기는 프라운호퍼 회절 효과에 의해 설명된 바와 같이 레이저 소스의 움직임의 함수였습니다. 480×640 픽셀 CCD(전하 결합 소자)를 사용하여 2차원 스팟 어레이의 이미지를 실시간으로 획득했습니다. 그런 다음 제안된 알고리즘을 사용하여 모션 매개변수를 얻었습니다. 이 방법과 위에서 설명한 CCD를 사용하여 변위의 분해능과 편향각은 각각 0.18μm와 0.0075rad였습니다. 또한, 픽셀 수가 더 많은 CCD는 서브 나노미터 및 마이크로 라디안 스케일로 변위 및 편향 각도의 해상도를 각각 향상시킬 수 있습니다. 마지막으로 제안된 방법을 사용하여 호버링 회전익기의 동적 위치를 추적 및 확인했으며, 이 방법을 사용하여 기체의 위치를 수정하고 하늘에서 항공기 안정화 방법을 제공할 수 있습니다.
<섹션 데이터-제목="배경">다중 자유도 모션 매개변수는 항공기 자세 안정성 제어, 건 프로브 시스템의 조준 안정성, 로봇 팔과 같은 응용 프로그램에서 대형 구조물에 널리 사용되는 특정 표적에 대한 정확한 위치 및 자세 정보를 제공할 수 있습니다. 이동, 정밀 부품의 정렬 및 산업 가공을 위한 공작물 위치 지정 [1,2,3].
따라서 목표물에 대한 다자유도 정보(예:진직도, 피치, 편향각)를 감지하기 위해 고정밀 감지 방식이 사용되었으며, 이러한 방식에는 고속 감지 특성을 비롯한 고성능 센서가 필요했습니다. , 동기화, 높은 측정 정밀도 및 실시간. 이러한 방법은 항공 우주, 무인 항공기, 정밀 제조 및 광학 정렬 응용 분야에서 널리 사용되었습니다[4,5,6].
동적 다중 자유도 움직임 정보의 정확한 실시간 측정 및 분리 방법은 항모 자세 안정성을 결정하는 핵심 요소였습니다. Hsieh [7]는 서로 다른 자유도를 감지하기 위해 3개의 모듈 그룹을 사용하는 3차원 감지 어레이를 제안했는데, 여기에서 서로 다른 감지 모듈을 사용하여 서로 다른 위치 정보를 측정하고 알고리즘을 사용하여 각도 및 다중 자유도를 계산했습니다. 자유도 정보. Liu[8]는 정보 측정을 수행하기 위해 두 개의 조립 격자 사이의 상대 각도 변화에 기반한 다중 자유도 모션 매개변수 측정 방법을 제시했습니다. 그러나 위의 접근 방식은 2개 이상의 감지 요소를 조립하고 결합 계산의 복잡성으로 인해 오류가 발생하기 쉬우며 정확도도 고정밀 기기 시스템에 따라 달라집니다.
마이크로나노 제조기술, 나노기술, 나노물질의 발달로 연구자들은 단일칩 구현을 기반으로 한 다자유도 모션 파라미터 검출 방법을 소형화 및 저비용 응용의 관점에서 연구해왔다. 나노재료, 광학재료, 나노소자 분야. Tana[9]는 측정 오류를 최소화할 수 있는 휴대용 소형 프리즘 구조를 기반으로 하는 비회절 빔을 사용하는 다중 자유도 이동 매개변수 감지 알고리즘을 보고했습니다. 우리 팀은 다축 통합 기계 센서를 사용하여 표면 벡터 스트레인 측정에 적용할 수 있는 단일 감지 요소를 기반으로 하는 벡터 스트레인 게이지 방법을 제시하고 이 논문에서 연구의 기초를 제공했습니다[8, 10].
이 작업에서는 단일 요소를 기반으로 하는 다중 자유도 벡터 변위 및 각도 측정 방법이 시연되었습니다. 이 소자는 타원 모양으로 미리 구부러진 폴리디메틸실록산(PDMS) 기판의 양면에 직교 구배 광학 격자 구조를 형성하기 위해 산소 플라즈마 처리 기술을 사용하여 제작되었습니다. 이러한 교차 광학 격자는 입력 레이저 빔이 2차원 스폿 어레이로 회절되도록 할 수 있습니다. 회절 지점 위치 정보를 사용하여 위치 알고리즘에 의해 실시간으로 계산된 입사빔 각도를 얻을 수 있습니다. 이 방법과 480×640 픽셀 전하 결합 소자(CCD)를 기반으로 한 변위와 편향각의 측정 분해능은 각각 0.18μm와 0.0075rad였습니다. 또한 픽셀 CCD가 높을수록 변위의 측정 해상도와 편향각을 각각 서브 나노미터 및 마이크로 라디안 수준으로 향상시킬 수 있습니다. 마지막으로 제안된 방법을 사용하여 실시간으로 호버링 회전익기의 동적 위치를 추적했습니다. 획득한 정보는 기체의 위치를 수정하는 데 사용할 수 있으며 하늘에서 항공기 안정화를 위한 새로운 방법을 증명합니다.
PDMS(Sylgard 184)는 Dow Corning에서 구입했습니다. PDMS(10:1) 멤브레인은 실리콘 웨이퍼에 스핀 코팅하여 준비했으며 80°C 미만의 온도에서 2시간 동안 회전한 직후 경화되었습니다. 회전 속도를 조절하여 두께 600μm의 PDMS 기판을 준비했습니다.
실험 요구 사항에 따라 PDMS 필름은 3 × 3 cm 2 면적으로 준비되었습니다. . 그런 다음 PDMS 필름은 수제 번역 단계를 사용하여 X 방향으로 원본에 대해 1.5배 사전 변형되었습니다. 주름진 SiO x 그런 다음 O2에 레이어가 형성되었습니다. 산소 유량 30sccm 및 산화 시간 40초의 조건에서 플라즈마 처리된 사전 변형 PDMS 기판(IoN Wave 10, PVA-TePla, Germany). pre-strained를 이완시킨 후 PDMS 기판 표면에 균일하고 규칙적인 나노 격자 구조가 형성되었습니다. 그림 1a와 같이 PDMS 기판의 다른 면에 90°의 각도차를 두고 이 과정을 반복하여 PDMS 기판의 양면에 직교 격자 구조를 형성했습니다.
<그림>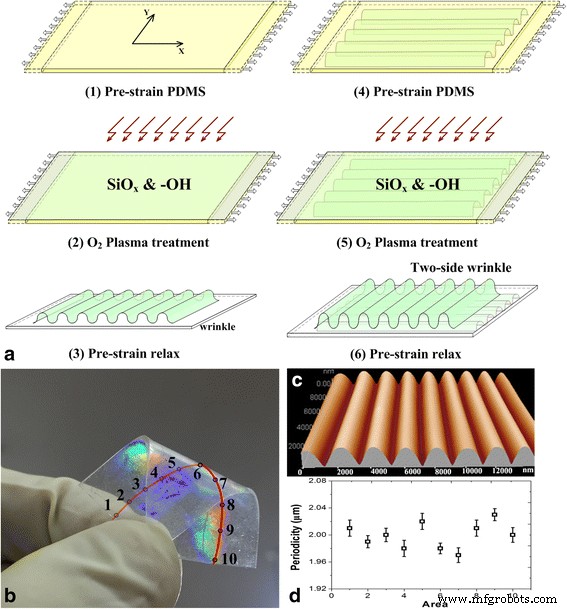
PDMS 이중 광학 격자의 제조 공정 및 형태 특성. 아 이중 광학 격자 제작. ㄴ 격자의 광학 이미지. ㄷ 격자의 원자력 현미경 이미지. d 샘플에 대한 주기성의 균일성
4 자유도 변위 각도 센서 시스템은 레이저 광원, 각도 및 변위 플랫폼 어셈블리, 표본 홀더, 스크린, CCD 카메라 및 컴퓨터를 포함하여 구축되었습니다. 그림 2a와 같이 He-Ne 레이저 광원(레이저 파장 680nm)은 전기 회전 플랫폼과 수동 3차원 조정 프레임으로 구성된 각도 및 변위 플랫폼 어셈블리에 설치되었습니다(Beijing Zolix Instrument Co., Ltd .). 플랫폼의 회전 정확도는 0.1°이고 변위 정확도는 2μm입니다. 이 교차된 광학 격자는 레이저 빔이 2차원 스폿 어레이로 회절되도록 할 수 있습니다. 480 × 640 픽셀의 CMOS(Complementary Metal-Oxide-Semiconductor) 카메라를 사용하여 각 회절점 위치를 추출한 다음 계산하는 데 사용된 MATLAB 이미지 처리 알고리즘을 사용하여 실시간으로 2차원 스폿 어레이의 이미지를 획득했습니다. x- 그리고 y -축 변위 및 각도 정보. 4로터 항공기(Typhoon Q500, Yuneec Electric Aviation) 형태의 테스트 플랫폼이 제공되었습니다. 그리고 실내 호버링 자세를 얻기 위해 4자유도 정보를 획득하였다.
<사진>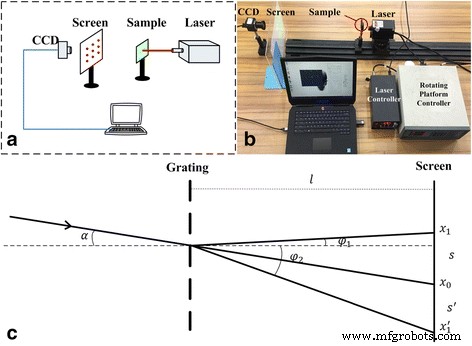
MODF 모션 매개변수의 원리 및 테스트 시스템. 아 시스템 다이어그램. ㄴ 시스템 설치. ㄷ 변위 및 각도의 테스트 원리
제조 공정은 그림 1a와 같이 표시되었습니다. PDMS의 친수성 표면 개질은 산소 플라즈마 기술을 사용했습니다. SiO x 따라서 산소 플라즈마에 의해 미리 구부러진 PDMS 기판에 층 및 친수성 기(예:-OH)가 형성되었습니다. PDMS 기판의 사전 변형률이 임계값을 초과하면 사전 변형률 완화 후 PDMS 표면에 격자 구조가 형성됩니다[11, 12]. 격자의 주기성은 적용된 사전 굽힘 및 플라즈마 조건을 조정하여 달성되었으며 이전 작업에서 계산할 수 있습니다. 도 1c에 도시된 바와 같이, 마이크로/나노그레이팅의 지형은 원자력 현미경(AFM)(CSPM5500; Benyuan Co.)에 의해 특성화되었다. 그림 1b, d와 같이 격자 구조의 주기성과 균일성을 연구하기 위해 샘플의 한 면의 중심선을 따라 10개 영역을 선택했습니다. 10개 영역의 격자의 해당 주기성은 균일했으며 전체 샘플 표면에 걸쳐 (2 ± 0.05) μm의 주기를 가졌습니다.
레이저 빔은 Fraunhofer 회절 이론[13]에 따라 샘플(격자 포함)을 통과하여 광점 매트릭스로 회절됩니다. 회절점의 위치는 입사광선의 위치 및 각도와 직접적인 관련이 있으므로 회절반의 위치정보로 입사광선의 위치정보를 검출할 수 있다.
그림 2는 위치 및 입사 광선의 해당 회절 지점을 추적하기 위한 이동 및 회전 플랫폼을 보여줍니다. Fraunhofer 회절 이론에 따르면 회절 격자와 스크린 거리가 고정되어 있을 때 입사 광선, 회절 광선 및 파장 사이의 관계는 다음과 같이 표현될 수 있습니다.
$$ d\left(\sin \varphi \pm \sin \alpha \right)=m\lambda \left(m=0,1,2,\dots \right) $$ (1)여기, λ 입사 광선의 파장, d 격자의 기간, α 입사각 φ 회절각, m 격자 회절 차수였습니다.
입사각 α일 때 0이 아닌 경우, "+"는 회절빔과 입사빔이 격자 법선의 같은 쪽에 분포함을 나타내고, "-"는 회절빔과 입사빔이 법선의 양면에 있음을 나타냅니다. 특정 입사각에서 1차 회절점과 0차 회절점 사이의 거리는 화면에서 동일하지 않았습니다. 따라서 점 사이의 거리는 입사각에 따라 변할 수 있습니다. 입사빔의 각도는 회절 광점 위치 계산을 통해 정량적으로 계산할 수 있습니다. 동시에 입사빔의 이동 위치는 0차 회절점의 이동을 유발합니다. 입사빔 위치 정보는 0차 회절빔 포인트의 위치 정보로 계산할 수 있습니다.
그림 2c는 격자 회절 다이어그램의 단일 방향을 보여줍니다. 여기서 x 0 회절 반점의 첫 번째 차수이고 x 1 \( {x}_1^{\hbox{'}} \) 는 회절 반점의 2차를 나타냅니다. 그림 2c에서 s 그리고 s '는 다음과 같이 표현되는 1차 회절점과 2차 회절점 사이의 거리입니다.
$$ s=l\tan \alpha +l\tan {\varphi}_1 $$ (2) $$ {s}^{\hbox{'}}=l\tan \alpha -l\tan {\varphi} _2 $$ (3)식에서. (1):
$$ d\left(\sin {\varphi}_1+\sin \alpha \right)=\lambda $$ (4) $$ d\left(\sin {\varphi}_2-\sin \alpha \right)=\람다 $$ (5)위로부터 빔 입사각과 회절 반점 간격 사이의 상관 모델은 다음과 같이 얻을 수 있습니다.
$$ s=l\tan \alpha +\tan \left(\arcsin \left(\frac{\lambda }{d}-\sin \alpha \right)\right) $$ (6) $$ {s} ^{\hbox{'}}=l\tan \alpha -\tan \left(\arcsin \left(\frac{\lambda }{d}+\sin \alpha \right)\right) $$ (7)단일 방향 광학 격자를 통과하는 레이저 빔은 단일 회절 지점을 형성할 수 있습니다. 직교 배향은 레이저 빔이 PDMS 기판의 양면에 있는 직교 격자를 통과할 때 형성될 수 있습니다. 1차원 격자 회절빔은 화면의 한 면의 격자 방향을 따라 광선이 투과되고 치수가 x로 설정될 때 형성됩니다. -중심선. 1차원 격자 회절 빔은 x - 광선이 화면의 다른 면에 있는 격자 방향을 따라 지나고 치수가 y로 설정되었을 때의 축 -중심선. 그림 3b와 같이 화면에 2차원 회절점 배열이 형성되었습니다.
<그림>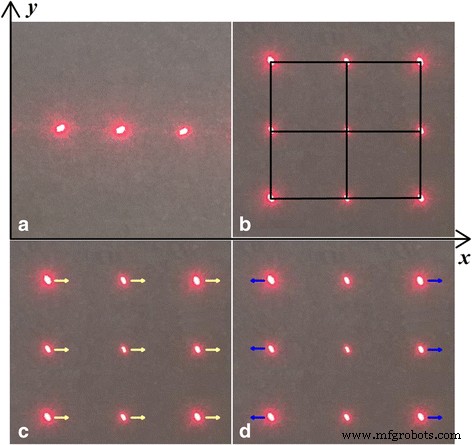
MODF 모션 매개변수는 회절 지점의 이동에 따라 다릅니다. 아 단일 방향 격자에 의해 1차원 회절 반점이 생성되었습니다. ㄴ 이중 교차 광학 격자에 의해 2차원 스폿 어레이가 생성되었습니다. ㄷ 스팟 어레이의 이동은 레이저 소스의 이동에 의해 제어되었습니다. d Spot array 사이의 Gap 이동을 레이저 빔의 입사각으로 제어
레이저 빔의 위치가 변경되면 회절 광점 위치의 0차수가 해당 이동을 표시하고 프라운호퍼 회절 이론에 따라 회절 비트맵의 위치가 그에 따라 변경됩니다. 입사 빔 위치는 격자 이동 방향에 따라 직접 계산할 수 있으며 x-를 따라 광선의 실현 위치 정보를 감지할 수 있습니다. 그리고 y -중심선. 그림 3c와 같이 회절점 위치의 1차에서는 변위와 편향의 결합 효과로 인해 광변위를 정확하게 계산할 수 없습니다. 또한 회절점 위치의 0차수는 소스 위치와만 관련이 있었습니다. 따라서 회절점 변위의 0차를 사용하여 광원의 위치를 계산하는 것이 더 정확할 것입니다. 그림 3d와 같이 x를 따라 입사하는 광선의 편향각 정보는 -축 및 y -축은 x의 광점 사이의 거리로 계산할 수 있습니다. -축 및 y -각도와 스폿의 변화 사이의 관련 모델을 기준으로 한 축입니다.
그러나 회절 반점의 변위 이유에 대한 제한은 입사각과 식에 따른 격자와 스크린 사이의 거리에 따라 다릅니다. (1). 우리 작업에서 격자는 스크린으로 고정되어 격자와 스크린 사이의 거리 편차가 0임을 의미합니다. 레이저 소스가 z를 따라 이동할 때 회절 반점의 변위가 없었습니다. -중심선. 또한 레이저 소스가 z -축에서 입사각 변화는 0이었으며, 이는 회절 반점의 변위를 초래하지 않을 것입니다.
우리 실험에서 각도 변화(Δθ x ) x를 따라 -축은 열 간격(s)으로 계산할 수 있습니다. x ,\( {s}_x^{\hbox{'}} \)) 회절점의 각도 변화(∆θ 와 ) y를 따라 -축은 열 간격(s)을 기반으로 계산할 수 있습니다. 와 ,\( {s}_y^{\prime } \)) 회절 반점. 포트폴리오 플랫폼을 조정하여 광원 위치를 변경한 다음 MATLAB 소프트웨어에서 매 0.02초마다 카메라 이미지를 획득하여 이전 값과 비교하기 위해 회절 스폿 위치를 추출했습니다. 이를 사용하여 x -축 및 y -축 및 배열의 열 간격 및 행 간격 변경.
알고리즘을 기반으로 이동 전후의 이미지를 처리하여 스팟 어레이의 변위를 분석하여 ∆x를 계산할 수 있습니다. ,∆y , ∆θ x 및 ∆θ 와 . 레이저 스폿은 이미지에 여러 개의 픽셀을 포함하고 그 에너지는 가우시안 분포를 따르므로 가우시안 분포 피팅 방법을 사용하여 이미지에서 배경 노이즈를 제거하여 레이저 스폿 중심 위치를 정확하게 추출했습니다. 레이저 스폿의 가우스 함수는 다음과 같이 표현됩니다.
$$ I\left(x,y\right)=H\cdot \exp \left\{-\left[\frac{{\left(x\hbox{-} xo\right)}^2}{\sigma_1 ^2}+\frac{{\left(y\hbox{-} yo\right)}^2}{\sigma_2^2}\right]\right\} $$ (8)여기, 나 (x , y )는 스팟 강도이고 H 진폭, (x 0 , y 0 )는 광점 중심 좌표이고, σ 1 , σ 2 x의 표준편차는 -축 및 y -축, 각각.
스폿 중심 위치를 얻기 위해 위 방정식의 양변에 로그를 적용할 수 있으며, 이는 다음과 같이 표현될 수 있습니다.
$$ {x}_0=-\frac{c}{2a} $$ (9) $$ {y}_0=-\frac{d}{2b} $$ (10)여기, a , b , c , 및 d 스폿의 모든 픽셀을 가우스 피팅하여 얻은 다항식 계수입니다.
두 개의 회절점 사이의 거리 변화는 이동 전후의 두 이미지로 계산되었습니다. 그리고 회절 반점의 중심점은 이동 전 좌표 중심 시스템인 광점의 절대 변위 및 상대 변위 좌표계로 설정되었습니다. 회절 광점의 절대 변위 좌표계는 정지 화면을 기준으로 했습니다. 이동 정보(Δx ,Δy ) 두 화면에서 격자의 0차 회절점 좌표(즉, 중심 위치)로 계산할 수 있습니다. 광점에 대한 상대 변위 좌표계는 회절 반점의 0차를 기준으로 사용했으며, 이는 점 배열 간격(S)의 변화를 계산하는 데 사용할 수 있습니다. x ) 및 행 간격(S 와 ).
그림 4는 4가지 자유도의 특성을 보여줍니다. 레이저 빔이 x를 따라 깎고 있을 때 -축, x에서 회절 격자의 상응하는 움직임이 있었습니다. -축이지만 변위는 y에서 약 0이었습니다. -중심선. 변위 감도는 약 5.4픽셀/μm였습니다. 이 방법은 그림 4a와 같이 축을 따라 광원의 위치 정보를 높은 정확도로 계산하는 데 사용할 수 있습니다.
<그림>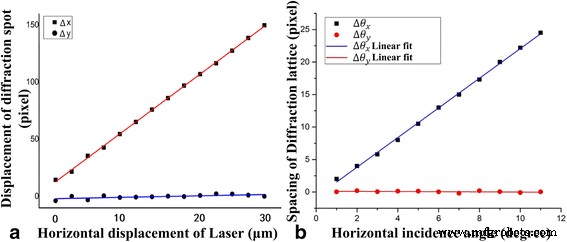
4 자유도의 특성화. 아 레이저 소스의 변위는 회절 지점의 변위에 따라 달라집니다. ㄴ 레이저 소스의 입사각은 회절점 사이의 간격에 따라 다릅니다.
레이저가 x를 따라 작은 각도로 회전할 때 -축에서 회절 스폿 어레이 행 간격의 해당 거리 변화가 있었고 스폿 어레이 열 간격은 0이었습니다. 변위 감도는 각도당 약 2.3픽셀(/°)이었습니다. 한편, 각도의 측정범위는 Eqs에 의해 계산된 이론상 약 9.8°였다. (1)–(5) 거리 s =0. 입사각이 증가함에 따라 회절 반점의 1차에 기인하는 회절 반점의 0차와 일치하므로 회절 반점의 거리 변화는 0이 됩니다(s =0). 이 방법은 x를 따라 광원의 각도 정보를 얻는 데 사용할 수 있습니다. -중심선. 이 방법을 사용하여 위치 및 각도 정보도 얻을 수 있습니다.
한 픽셀의 감지 해상도는 MATLAB 소프트웨어 기반 알고리즘에 따라 다릅니다. 위에서 계산한 바와 같이 이 방법의 변위 감도는 5.4pixels/μm이며, 이는 해상도가 0.18μm임을 의미합니다. 2.3픽셀의 변위 감도/° , 0.0075rad의 해상도였습니다. 이는 여기에 제시된 방법과 CCD 분해능을 기반으로 하여 변위 및 각도 분해능이 각각 0.18μm 및 0.0075rad임을 보여줍니다. 480×640픽셀 CCD를 사용하여 2차원 스폿 어레이의 이미지를 실시간으로 획득했습니다. 또한 더 높은 픽셀 CCD와 광 경로 최적화는 각각 서브 나노미터 및 마이크로 라디안 스케일까지 변위 및 편향 각도의 해상도를 향상시킬 수 있습니다.
회전익기는 정밀도가 낮은 민간용 무인항공기의 일종으로 항공, 모형항공기, 항법분야에서 널리 사용되었다. 회전익의 안정성 제어는 무인 전투 플랫폼의 축소판을 나타냅니다. 고정밀 비행 제어를 구현하기 위해서는 기체의 자세와 위치를 안정적으로 제어하는 것이 가장 중요했습니다. 그리고 핵심 측면은 고정밀 호버링 자세 및 위치 정보를 실시간으로 디코딩하여 호버링에 대한 정확한 4자유도 모션 매개변수 정보가 필수 자산이 되도록 하는 것이었습니다.
우리의 실험에서는 교차 결합 회절 격자를 기반으로 항공기 비행의 4자유도 자세 정보를 실시간으로 얻기 위한 측정 방법을 제시했습니다. 먼저 4개의 회전자 항공기를 사용하여 4개의 자유도 테스트 시스템의 위치와 자세로 구성된 플랫폼을 대체했으며, 4개의 자유도를 설정하기 위해 이중 격자를 기반으로 했습니다. - 4로터 항공기를 위한 자유자세 시험 시스템. 테스트 시스템에서는 4륜 항공기의 중심에 작은 레이저 포인터를 광원으로 고정하여 레이저 빔을 수직으로 아래쪽으로 비춥니다. 이중 격자, 스크린 및 카메라가 있는 샘플은 광축의 중심을 따라 회전합니다. 이 교차된 광학 격자는 레이저 빔이 2차원 스폿 어레이로 회절되도록 할 수 있습니다. 실험에서 카메라는 화면에서 사진을 획득하고 실시간으로 컴퓨터로 이미지를 전송하여 MATLAB 소프트웨어로 변위 정보를 계산하는 데 사용되었습니다.
비행 신호를 빠르고 정확하며 실시간으로 측정하기 위해 로터가 4개인 항공기는 공중에 떠 있고 4초 동안 유지된 자세 신호를 빠르게 추적했습니다. x를 따라 축 방향 변위에 대한 정보 -축 및 y 4 로터 항공기의 -축은 그림 5c와 같이 4초의 시간에 구했습니다. 평면 좌표계(즉, x -축 및 y -축), x 그리고 y 값은 이러한 좌표점으로 변환됩니다. 200 포지셔닝 결과 4는 0.02초에 획득한 1포인트를 의미합니다. 이는 실시간으로 0.02초마다 항공기의 추적 방법을 사용하여 위치와 위치를 결정함을 나타냅니다. 항공기의 최대 변위는 x에서 2.1mm입니다. -축 및 y에서 2.3mm의 최대 변위 -축, 알고리즘에 따른 것.
<그림>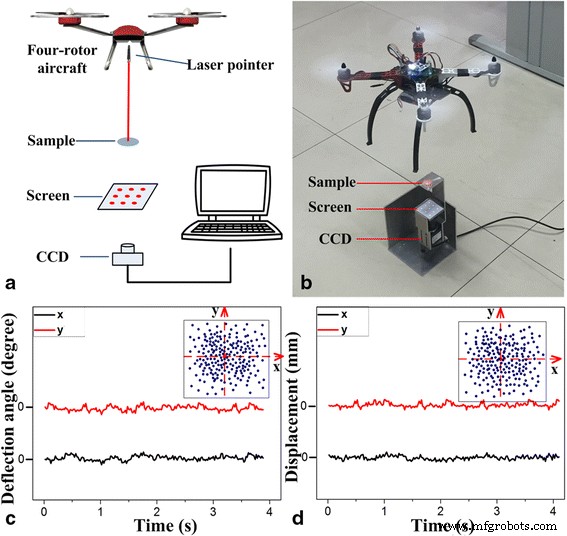
4-로터 크래프트 자세의 특성. 아 시스템 다이어그램. ㄴ 시스템 설정. ㄷ 로터 크래프트의 편향 각도. d 로터 크래프트의 변위
또한, 위의 알고리즘과 데이터 처리 방법을 통해 항공기에 대한 피치각 및 롤각 정보를 계산하였다. 도 5d의 삽입도에서 보는 바와 같이 4로터 항공기의 회전각 도트 다이어그램은 0.02초마다 실시간으로 추적하여 항공기에 대한 정확한 각도 정보를 전달하였다. 항공기는 x에서 최대 각도 편차가 1°임을 관찰했습니다. -축 및 y- 중심선. 따라서 이 방법은 항공기의 4자유도 정보를 계산할 수 있으며, 정확한 위치 및 각도 신호를 0.02초 이내에 비행 제어 시스템에 피드백하여 항공기의 안정성을 개선할 수 있습니다.
요약하면, PDMS 기판의 양면에 2μm의 주기성을 갖는 직교 광학 격자 구조를 제조하는 간단한 제조 기술이 시연되었습니다. 직교 광격자 구조를 기반으로 프라운호퍼 회절 효과에 기반한 회절 광점 위치 정보를 이용하여 빔 위치 및 각도 운동 파라미터 정보를 식별하는 방법이 연구되었다. 480×640 픽셀 CCD를 사용하여 실시간으로 2차원 스폿 어레이의 이미지를 획득했습니다. 결과는 이 방법과 위에서 설명한 CCD를 사용할 때 변위의 분해능과 편향각이 각각 0.18μm와 0.0075rad임을 보여줍니다. 또한 픽셀 CCD가 높을수록 변위 해상도와 편향 각도가 각각 서브 나노미터 및 마이크로 라디안 스케일까지 향상될 수 있습니다. 이 방법은 로터 항공기의 정확한 호버 위치 및 각도 정보를 0.02초마다 높은 정확도로 실시간으로 감지하는 데 사용할 수 있습니다. 정보는 공중에서 무인 항공기의 비행 시스템을 제어하기 위해 돌려줄 수 있습니다. 이 방법은 간단하고, 저비용, 고정밀이며 무인 전투 플랫폼을 위한 안정적인 비행과 항공기의 정밀한 제어를 위한 연구 기반을 제공하면서 실시간 모니터링을 실현할 수 있습니다.
나노물질
적층 제조인 3D 프린팅은 CAD 모델을 사용하여 3차원 개체 또는 구성 요소를 만드는 역할을 합니다. 물리적 부분을 만들 때 재료 층을 추가하는 생물학적 과정을 모방하여 그렇게 합니다. 3D 프린팅은 기존의 제조 방식과 달리 적은 재료로 기능적인 모양을 만드는 데 도움이 됩니다. 3D 프린팅은 자동차 부품, 스마트폰 케이스, 패션 액세서리 및 건강 분야의 건축을 만드는 데 사용되어 보청기 등과 같은 장기를 만듭니다. 패션에서는 방탄복과 내화복을 만드는 데 사용됩니다. 모든 산업에서 3D 프린터를 구축하는 데 사용되는 다양한
알루미늄은 지각에서 산소와 실리콘 다음으로 세 번째로 흔한 원소입니다. 내식성이 뛰어나고 밀도가 낮아 운송, 항공 우주, 전기 및 건축 산업에서 중요합니다. 생활용품에도 사용할 수 있습니다. 알루미늄의 25%는 주조되고 다른 하나는 단조 또는 합금 알루미늄입니다. 주물 알루미늄 MIC6, 319, 356, 383 알루미늄 319는 실린더 헤드 및 변속기 하우징에 사용되며 356은 실린더 헤드, 383은 엔진 블록에 사용됩니다. 고압 다이캐스팅으로 만들어진 부품은 열처리가 필요하지 않습니다. 알루미늄 다이캐스팅은 단조 알루미늄보다