게스트 블로그 — Markforged를 사용한 Charles Guan 준비
이 게스트 블로그는 MIT 기계 공학 졸업생이자 전 MIT 기계 공장 및 설계 강사인 Charles Guan이 작성했습니다. 그는 또한 이번 여름 목요일 오후 8시 동부/7시 중부에서 방송되는 ABC의 BattleBots에서 로봇 정밀 검사를 제작했습니다. 그는 로봇 및 운송 분야의 엔지니어링 컨설턴트로 일하고 있으며, BattleBots에서 경쟁하기 위해 Markforged의 후원을 받고 있습니다. 그의 웹사이트와 Equals Zero Robotics를 확인하십시오.
전투 로봇 배경

로봇 격투 세계에는 항상 보는 경향이 있는 몇 가지 기본 디자인이 있습니다. 쐐기, 오리발, 망치, 회전하는 로터 등이 있습니다. 전설의 포켓몬과 마찬가지로 일부 디자인은 "성배"이며 경기장에서 거의 볼 수 없으며 훨씬 더 드물게 실행됩니다. "플라이휠 플리퍼"가 그 중 하나입니다. 일반적으로 상대방을 몇 피트 높이로 던지는 것과 같은 고속 뒤집기 팔은 공압식입니다. 그러나 공압은 전력 밀도가 높지만 에너지 밀도가 높지 않으며 최고의 오리발도 말 그대로 가스가 다 떨어지기 전에 12개 미만의 좋은 샷을 얻을 수 있습니다. 전기 플라이휠 플리퍼는 배터리의 높은 에너지 밀도와 플라이휠의 운동 에너지의 높은 전력 가용성을 결합합니다.
이 에너지를 빠르게 방출할 수 있지만 제어 가능한 형태로 전환하는 것은 어려운 일이었습니다. 설계 과제에는 신뢰할 수 있는 참여 메커니즘, 일관된 타이밍, 점진적 가속화 및 비즈니스 목적에 대한 강력한 연결이 포함됩니다. 이 중 하나를 엉망으로 만들면 운동 에너지 수류탄을 만들 수도 있습니다.
모든 로봇 격투 역사에서 몇 가지 예만 만들어졌습니다. 작은 끝에는 그의 봇 Magneato와 Dale Heatherington의 비교적 성공적인 디자인을 포함하여 Zac O'Donnell의 3~30lb급 로봇 시리즈가 있습니다. 대형 봇의 경우 Warrior가 벤치마크였습니다.

이러한 봇은 각각 다른 설계 접근 방식과 최종 메커니즘을 사용합니다. 이것은 디자인이 커뮤니티에서 가지고 있는 탐색 수준을 보여줍니다. 로봇 디자인은 건축업자가 지역적으로 최적의 솔루션을 찾을 때 비슷하게 성장하는 경향이 있으므로 끝까지 여러 수단을 사용하는 무기 디자인은 아직 길들여지지 않은 것입니다.
지금 몇 년 동안 저는 "pointy flywheel"(이빨이 있는 회전 드럼 또는 디스크)과 인라인으로 장착할 수 있고 반대쪽에 있는 메커니즘에 연결될 수 있는 문제에 대한 컴팩트한 동축 솔루션을 찾고 있었습니다. 로봇. 그것은 많은 전략적 가능성을 가진 이중 무기 로봇을 만듭니다. 그래서 나는 BattleBots 토너먼트 사이에 오프 시즌을 하여 3파운드의 작은 로봇에서 이 아이디어를 더 추구하고, 내 디자인 기술을 날카롭게 유지하고, 커뮤니티를 위한 또 다른 솔루션을 발표하는 데 도움을 줄 것이라고 생각했습니다. 왜 3lb급 로봇인가? Mark Two를 사용하여 인쇄할 수 있는 간편한 크기이기 때문입니다!

3D 인쇄된 기어 메커니즘 설계
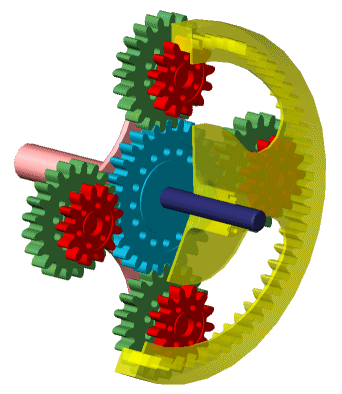
요구 사항에는 매우 높은 기어비(20 대 1 이상)를 동축 볼륨에 채우고 필요할 때만 해당 기어 감속을 작동시키는 방법을 찾는 것이 포함됩니다. 나는 복합 유성 기어 트레인으로 알려진 유성 기어 시스템을 조사했으며, 유서 깊은 "Mechanisms and Mechanical Devices Sourcebook"을 비롯한 여러 참고 서적을 펼쳤고 인터넷에서 설계 백서를 검색했습니다. 간단히 말해서, 이것은 약간 다른 크기의 두 링 기어의 상대 속도를 이용하여 단순한 유성 기어박스와 동일한 볼륨에서 매우 높은 기어비를 생성할 수 있습니다.
맞춤형 슬라이딩 도그 클러치와 마찰 밴드를 설계하는 데 잠시 일한 후, 저는 제가 자동 변속기를 직접 설계하고 있다는 것을 깨달았습니다. 복잡한 것은 전투에서 오래 살지 못하기 때문에 이 기어 감소 시스템을 사용할 다른 방법을 생각해야 했습니다. 해결책은 기어 세트를 토크 분할 장치로 사용하는 것입니다. 이것을 Toyota의 "Hybrid Synergy Drive" 또는 기타 상표가 붙은 무한 가변 변속기 이름으로 알 수 있습니다. 이 발견은 역사상 많은 수만큼 우연히 이루어졌습니다. 저는 CAD 모델을 회전시키고 있었는데 하나의 링 기어를 고정하면 다른 하나가 계속 회전하고 그 반대의 경우도 마찬가지라는 것을 발견했습니다. "상대 속도"가 그 속도 중 하나가 0이 될 수 있음을 의미한다는 것을 잊었습니다.
흥분한 나는 장난감 링 기어와 유성 기어 세트를 빠르게 모델링하고 Mark Two에서 Onyx를 사용하여 인쇄했습니다. 오닉스는 충분히 강하고 단단할 것이라고 믿었던 유일한 소재였습니다. 로봇의 크기가 작기 때문에 사용할 수 있는 톱니 크기가 제한되었습니다. 일반 나일론 이빨은 너무 유연했을 것입니다. 그래서 작은 치수 변경을 해야 할 경우를 대비하여 장난감 모델을 최종 제품의 허용 오차 게이지로 사용하고 싶었습니다. 이 모델은 브레이크, 클러치 또는 자전거 바퀴 스포크를 통해 막대기를 사용하여 어떤 방법을 사용하든 한 기어를 갑자기 멈추어야 한다는 가설을 확인시켜 주었습니다. 그러면 다른 링은 강제로 회전합니다!

로봇 전투 준비
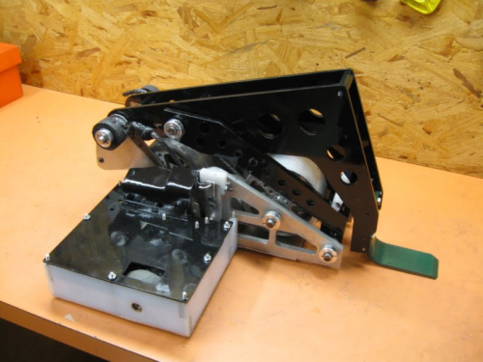
이후 본격적으로 로봇 작업이 시작됐다. 저는 예전에 아이디어 스케치 중 일부를 꺼내 개념을 파악하고 개별 디자인 요구 사항에 대해 작업하기 위해 "첫 번째 패스" CAD 모델로 이동하기로 결정했습니다. 긴 이야기를 짧게 하기 위해 여기 현재 상태의 디자인 사진이 있습니다!
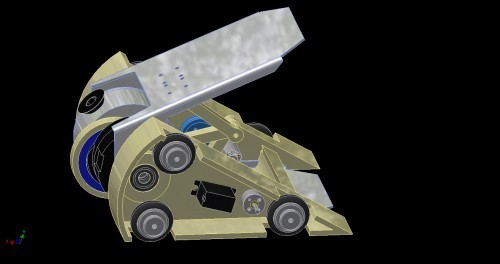
여기에서 무슨 일이 일어나고 있습니까? 그것은 뒤집을 수 있는 삼각형 몸체를 가지고 있습니다. 말할 것도 없이 "거꾸로" 있습니다. 왼쪽에 있는 둥근 은색 물체는 8온스 알루미늄 로터로 소켓 헤드 볼트가 '치아'로 되어 있으며, 이는 회전하는 무기에 대한 이 작은 중량 등급에서 일반적인 전술입니다. 유성 메커니즘은 검은색(오닉스용)으로 모델링되었으며 서보 모터는 명령에 따라 슬라이딩 톱니를 노치 링 기어로 밀어 회전을 멈추고 다른 링 기어가 시작되도록 합니다. 이 링 기어에는 캠이 회전할 때 위쪽 및 아래쪽 금속 날개를 분리시키는 "나비 연결 장치"에 대한 커넥팅 로드가 있는 오프셋 캠 로브가 있습니다. 금속 날개는 공통 지점에 경첩이 달려 있어 하나는 지면에 반응하고 다른 하나는 그 위에 있는 것을 위로 들어올립니다.
이 디자인이 완성되기 전에 아직 해결해야 할 세부 사항과 기하학적 문제가 있지만 이제 개념에 자신이 있습니다. 단점이 있습니다. 예를 들어, 슬라이딩 톱니가 끼면 메커니즘이 항상 켜져 있고 봇이 이동성을 잃을 수 있습니다. 날개에 무게를 싣지 않고 불을 피우면 아마도 스스로 지붕으로 올라갈 것입니다. 하지만 디자인의 단점이 눈에 띄게 드러나는 것을 보는 것은 스포츠의 재미 중 하나이므로 이 봇에서 어떤 일이 일어날지 기대됩니다!
시스템 데모는 다음과 같습니다.
다음은 디자인 사진입니다.


사진 제공:Charles Guan.


