

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
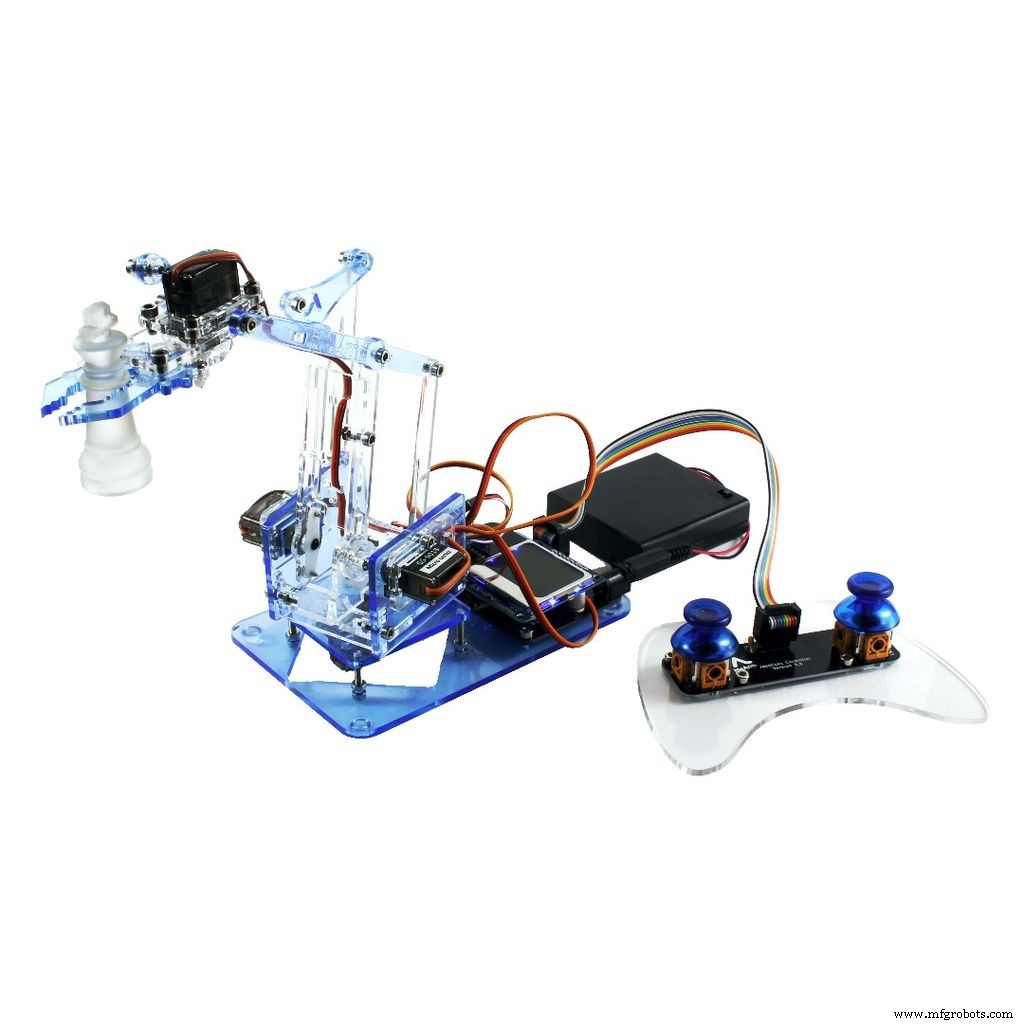
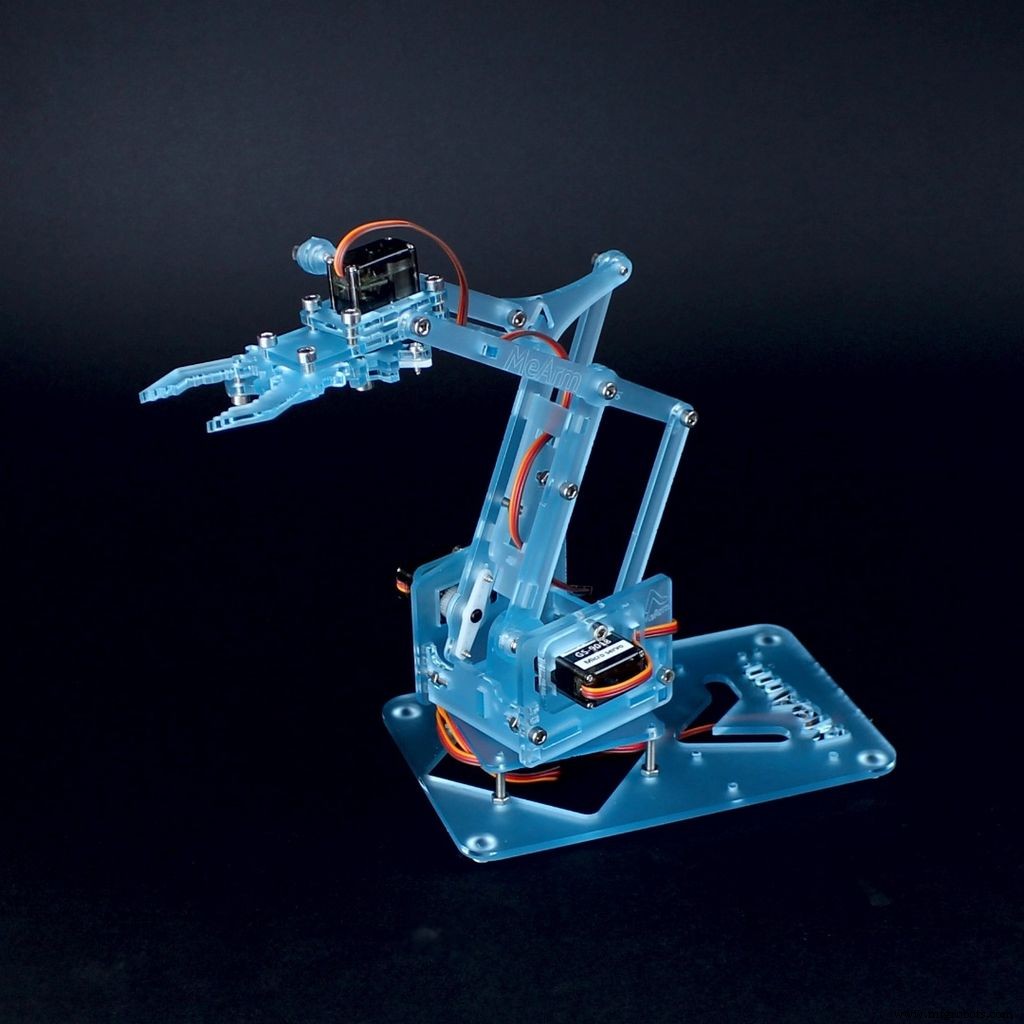
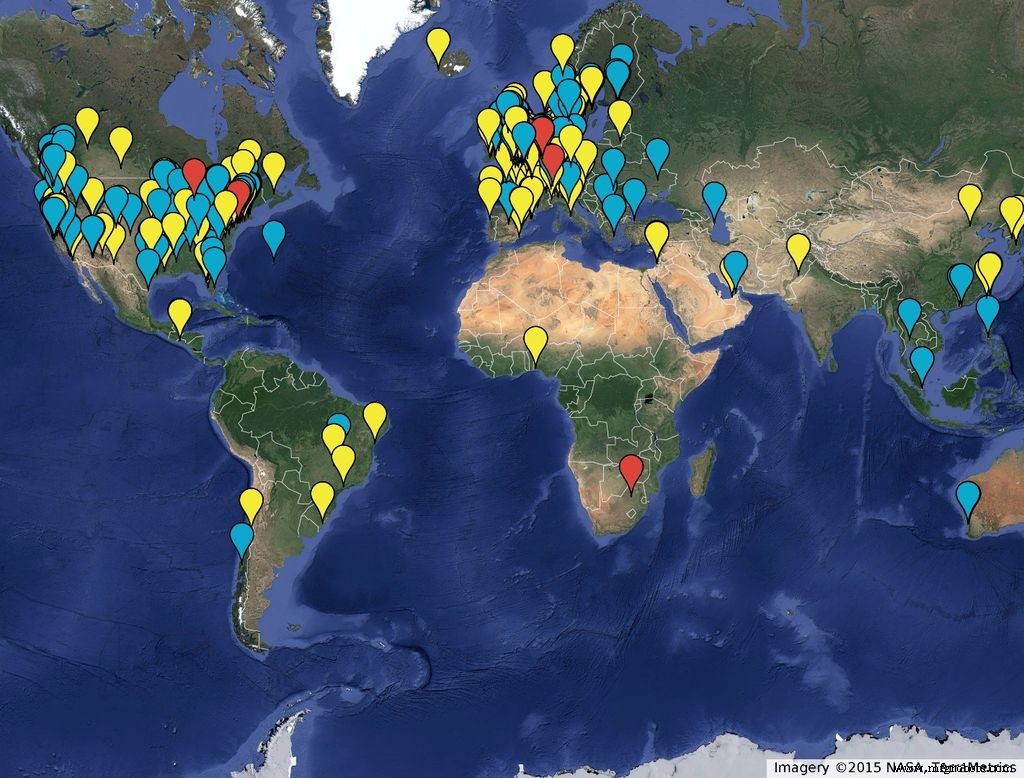
이것은 MeArm 로봇 암에 대한 빌드 지침의 최신 버전입니다. MeArm은 2014년 4월 Robots Contest에서 2등을 차지하면서 처음으로 instructable에 등장했습니다. 그 이후로 우리는 전 세계적으로 약 10,000개가 건설되는 것을 보았습니다! 지도에는 소수에 불과하지만 강사의 도움으로 우리가 세계 최초의 바이러스성 로봇이 된 것을 정말 자랑스럽게 생각합니다!
리소스 페이지의 내용을 보완하기 위해 이 지침을 모았습니다.
1단계:파일을 잡고 레이저를 발사하세요!
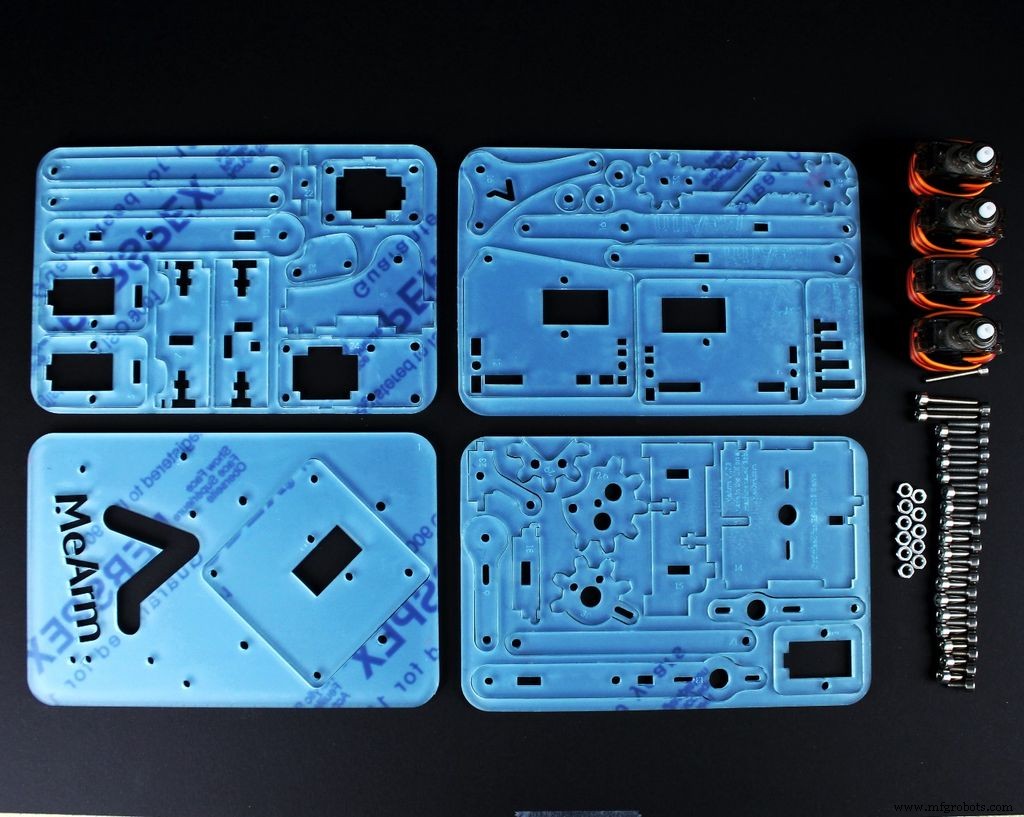
MeArm은 여전히 그리고 거의 항상 오픈 소스 하드웨어였습니다. 그래서 당신은 thingverse에서 우리 파일을 가져올 수 있습니다. .dxf 파일이므로 대부분의 레이저 절단기에서 작동해야 하며 올바른 크기로 설정할 수 있도록 부품 주위에 상자를 두었습니다. 우리는 3mm 아크릴을 사용하지만 디자인은 상당히 관대하며 나무로 만들어졌으며 심지어 3D로 인쇄된 것을 보았습니다.
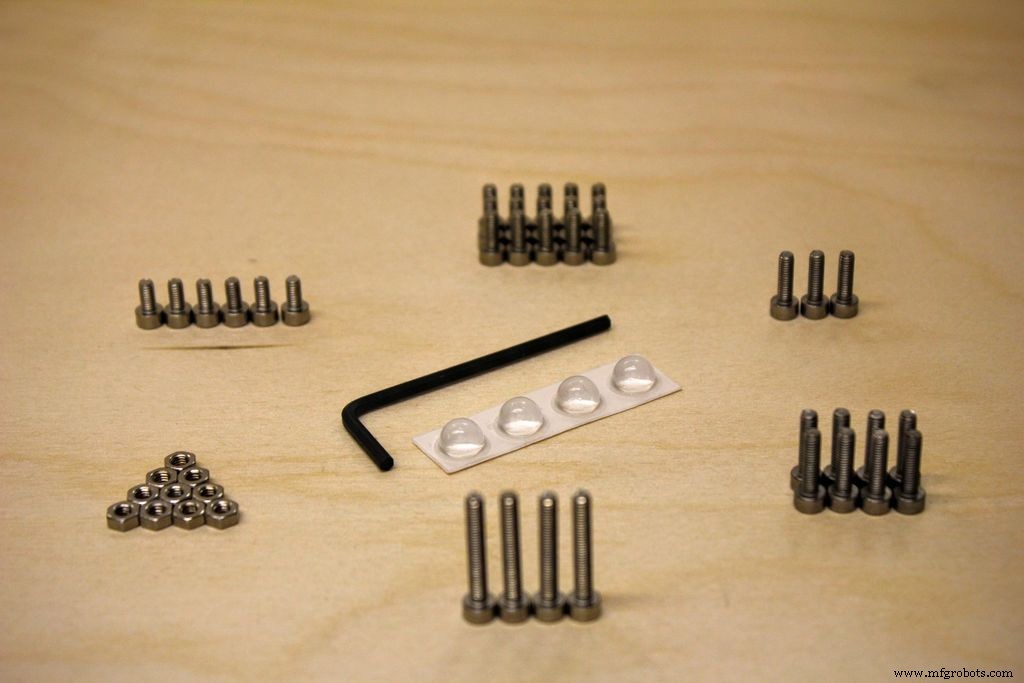
나사도 많이 필요합니다. 현재 로드 아웃에는 다음이 필요합니다.
너트 x 11
6mm x 7
8mm x 15
10mm x 5
12mm x 8
20mm x 4
모든 M3 크기는 미터법 3mm입니다. 내가 이해하는 것은 주에서 찾기가 어려울 수 있지만 달에 도착했다면 적절한 대안을 찾을 수 있을 것입니다!
2단계:잠시만요! 보정합시다!
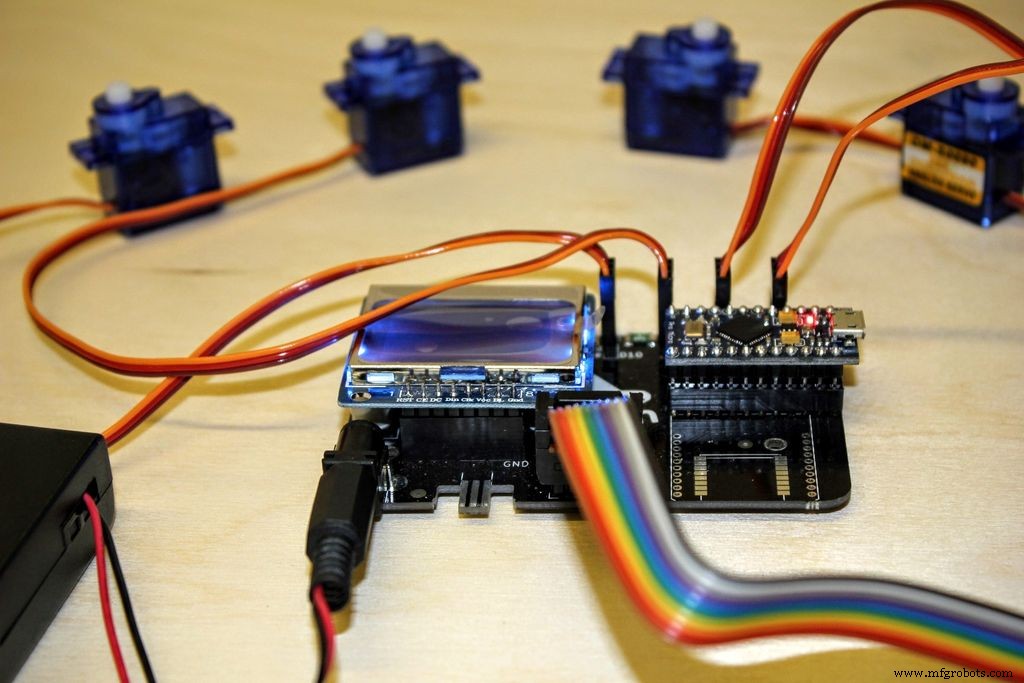

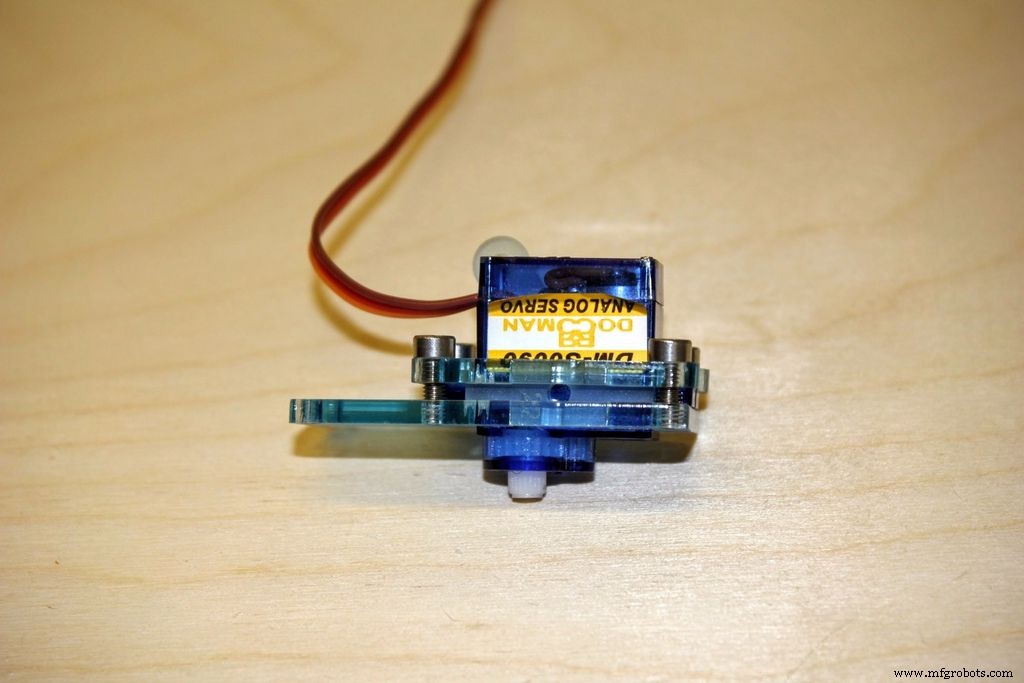
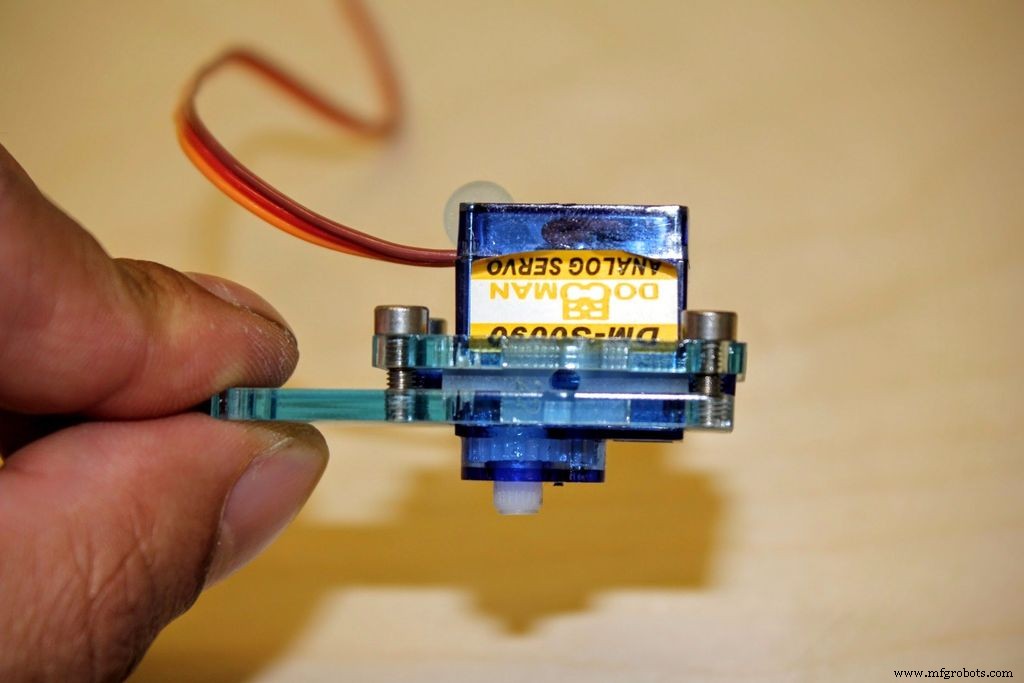
부품을 레이저로 절단했거나 당사 키트 중 하나를 구입했다면 정말 만들고 싶어할 것입니다. 그러나 먼저 중요한 단계를 완료해야 합니다. 서보를 보정해야 합니다. 여기에서는 Arduino와 호환되는 Brain Board를 사용할 것이지만 PWM 신호를 생성하는 모든 것을 사용하여 이를 보정할 수 있습니다. Arduino, Raspberry Pi, Beaglebone Black, Sparkcore 및 Espruino에서 사용할 수 있는 MeArm 코드가 있습니다.
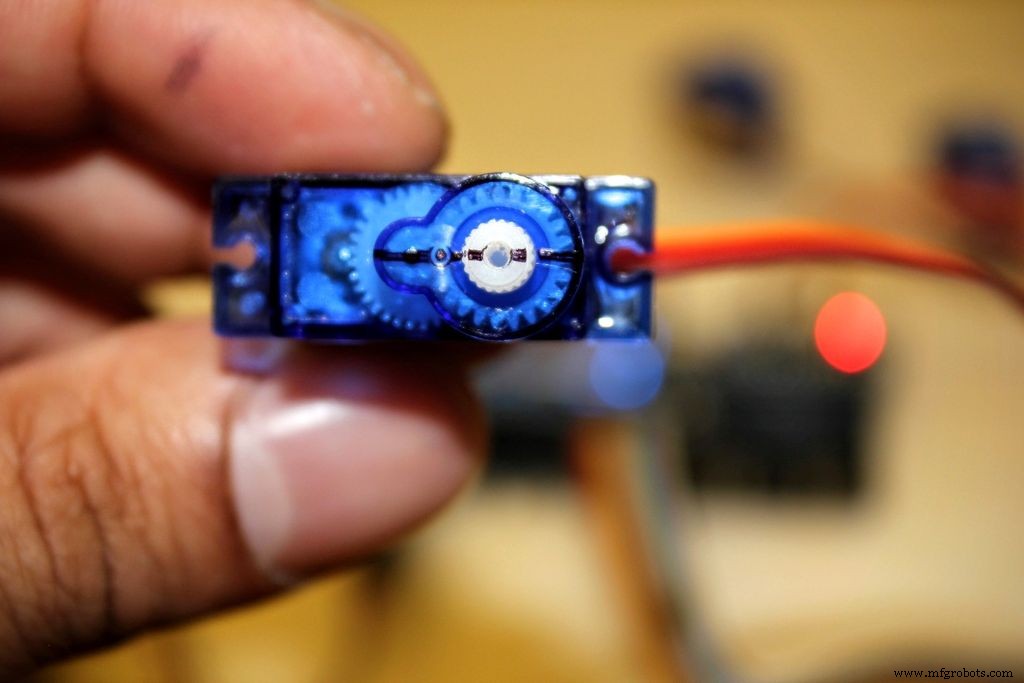
Brain Board를 사용하면 기본 위치로 이동하도록 프로그래밍됩니다. 센터, 왼쪽, 오른쪽 및 클로에 대한 서보의 경우 각각 90, 90, 90 및 25입니다. 서보의 스핀들과 본체에 중심선을 표시하고 c, l, r 및 c 또는 귀하에게 의미 있는 다른 시스템을 표시할 수도 있습니다.
손으로 돌리려고 하지 마십시오. 강력한 힘이 제공하는 토크로 인해 서보 기어가 벗겨질 수 있습니다. 같은 이유로 MeArm을 구축하기 전에 이 프로세스를 수행하는 것이 매우 중요합니다.
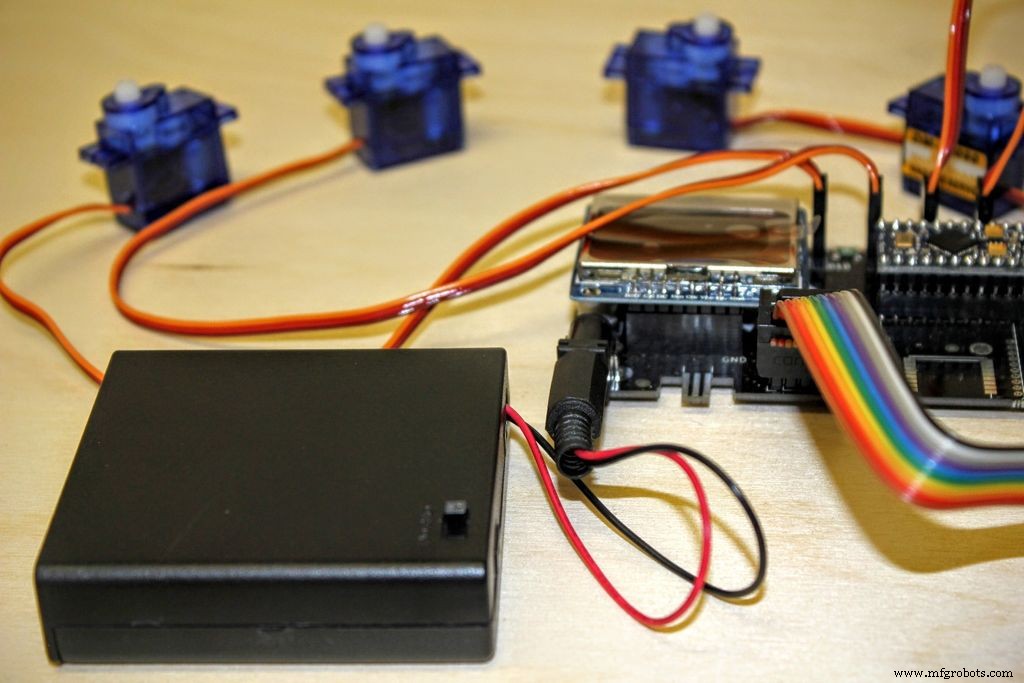
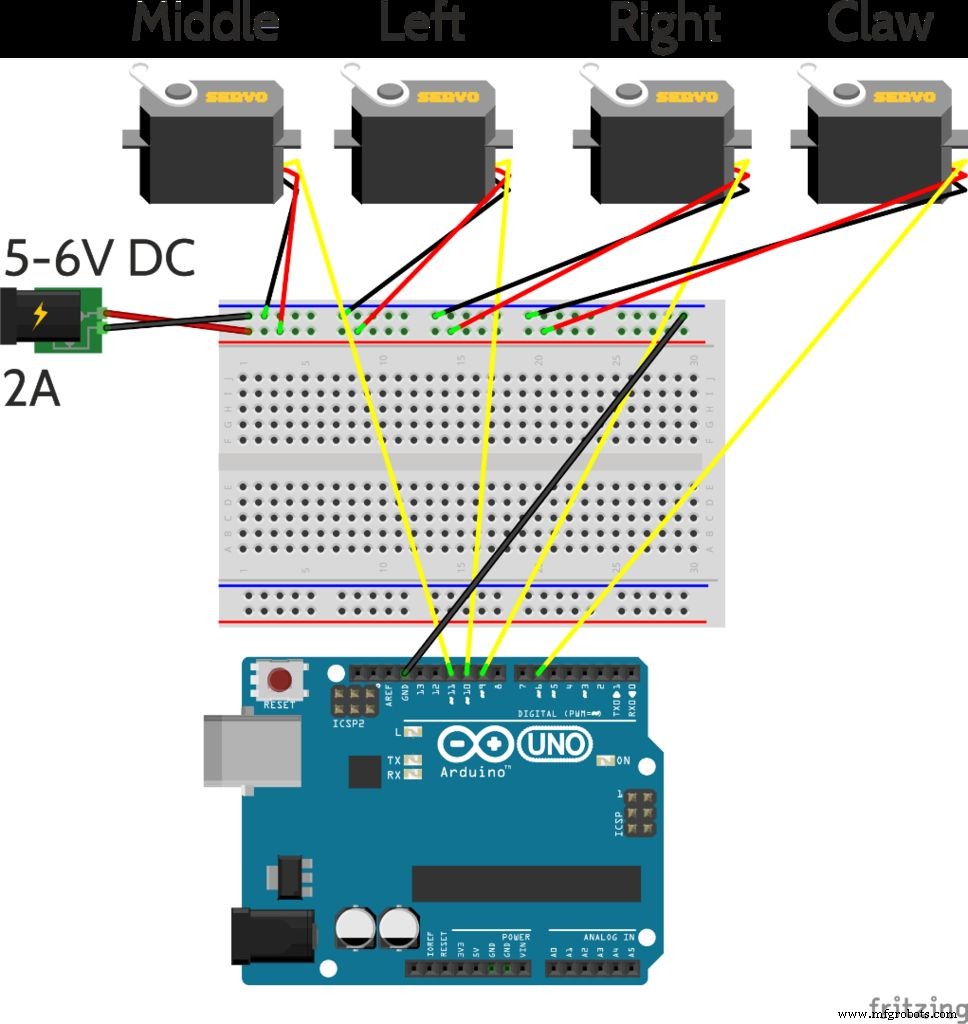
Arduino를 사용하는 경우 위의 이미지에 표시된 설정과 이 코드는 동일한 결과를 제공합니다. 우리는 데모 코드에 Codebender를 사용하며 티셔츠를 원합니다. 따라서 계정을 개설하려면 이 링크를 사용하십시오.
서보를 설정할 때 깨달아야 할 가장 중요한 부분은 마이크로컨트롤러를 통해 서보에 전원을 공급할 수 없다는 것입니다. 마이크로 컨트롤러에 대한 공통 접지와 함께 별도의 5-6V 2A 전원 공급 장치가 필요합니다. 자세한 내용은 Arduino 설정 이미지를 확인하세요.
3단계:가자!
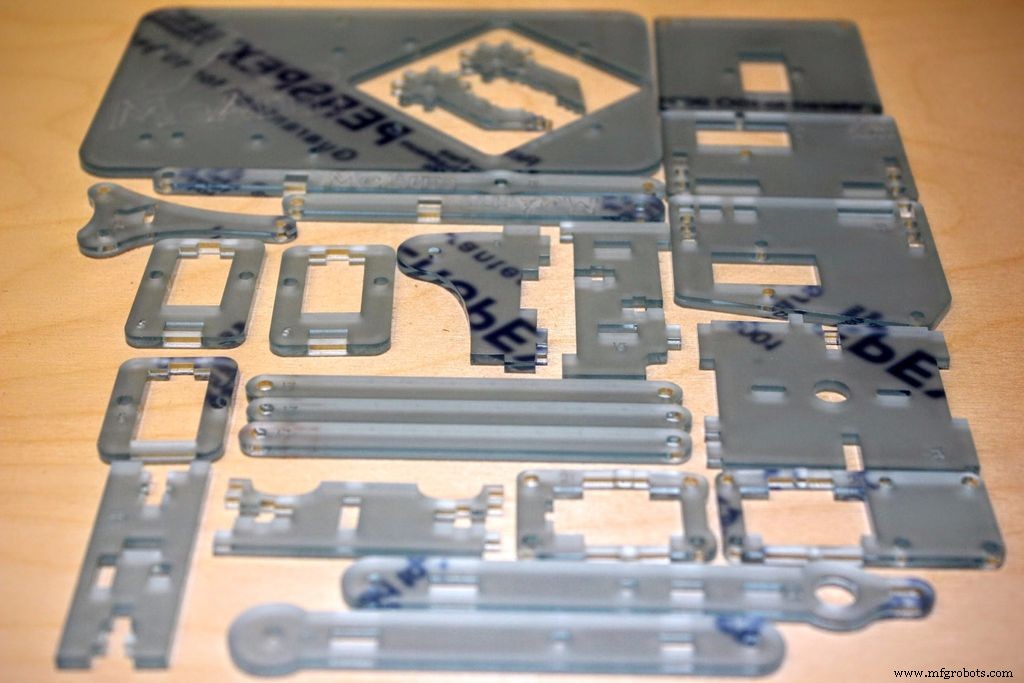
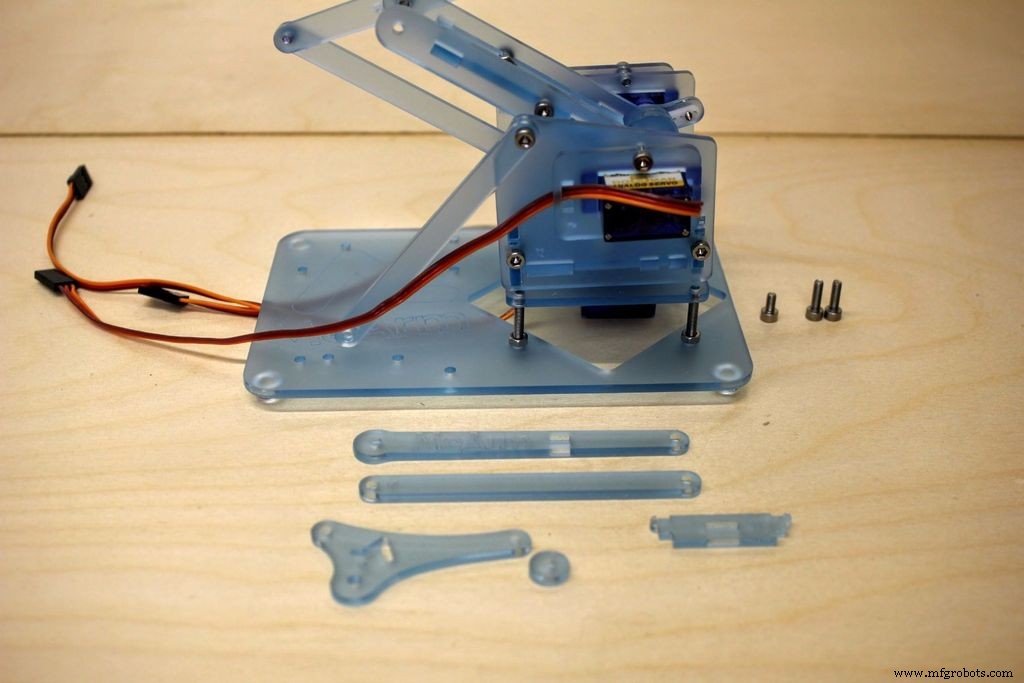
보정된 서보로 균열이 생길 수 있습니다. 말 그대로 스냅 아웃 팩 중 하나가 있다면!
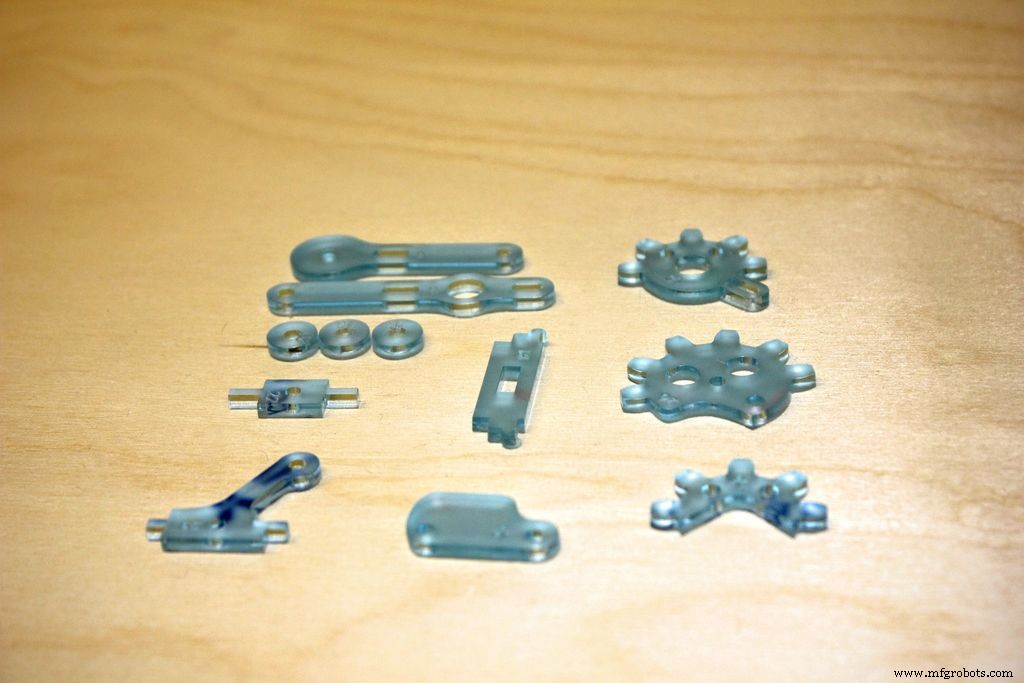
아크릴 조각의 보호 지지대를 제거하는 데 시간이 필요할 것입니다. 이동하면서 또는 한 번에 모두 수행할 수 있습니다. 당신의 전화입니다.
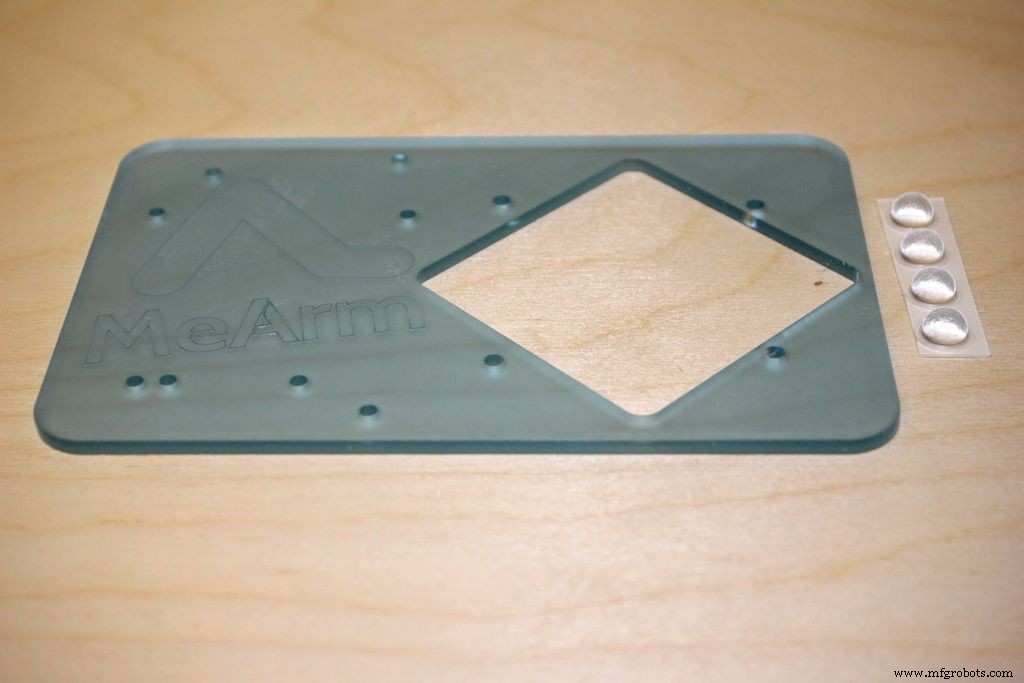
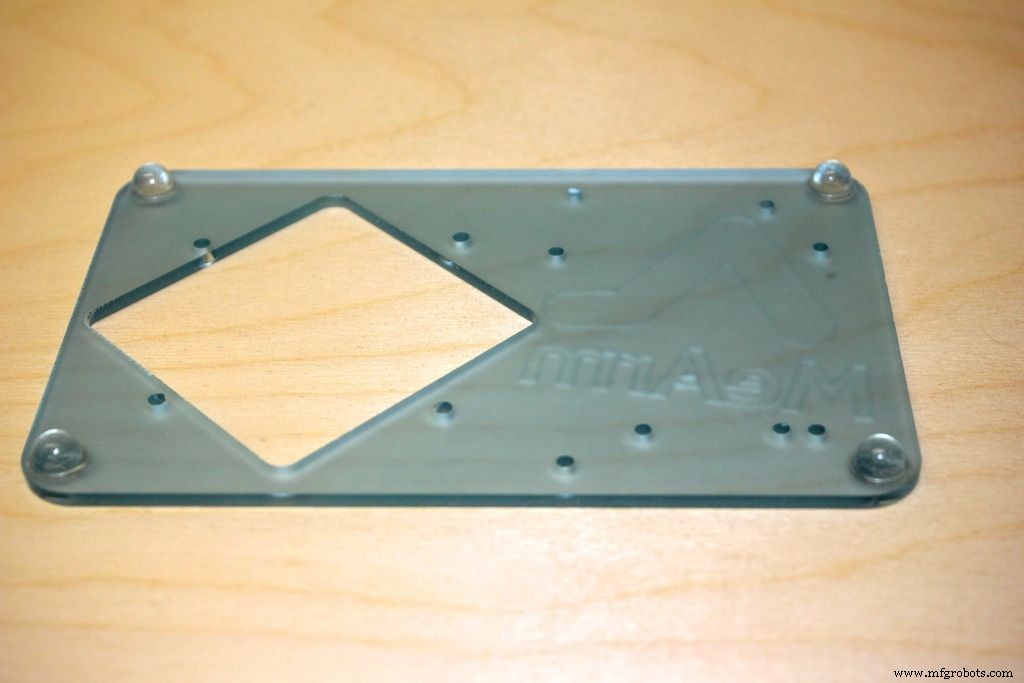
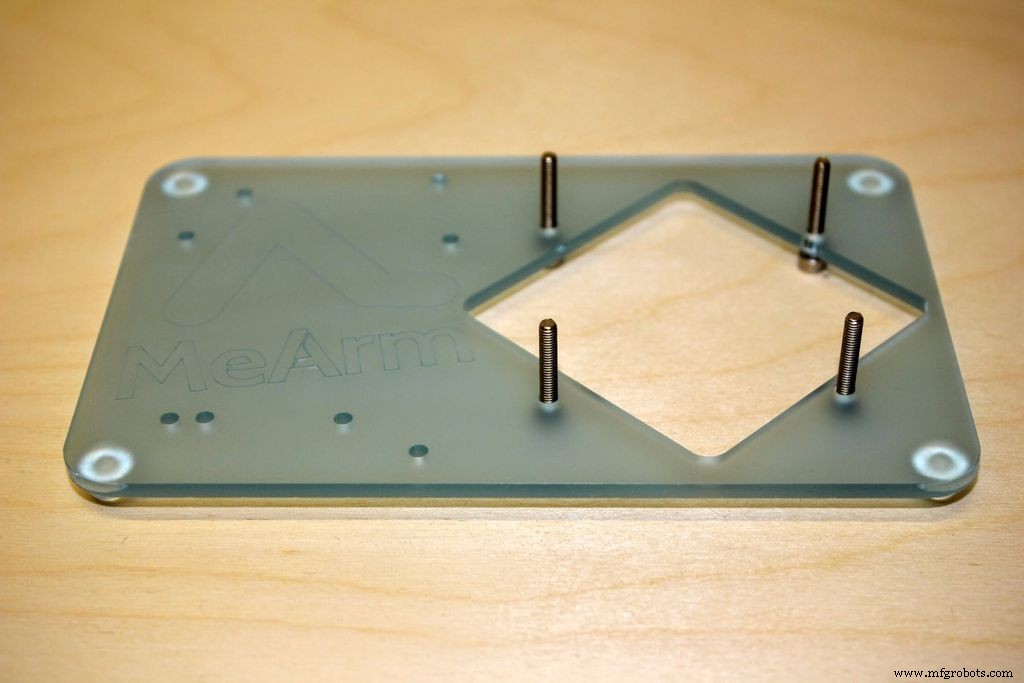
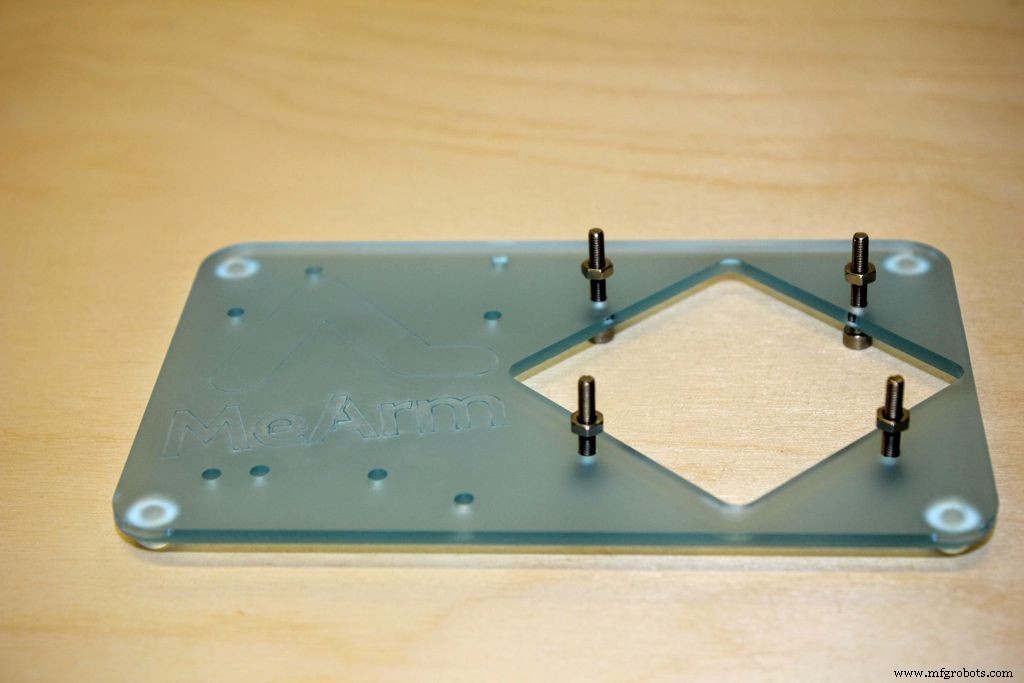
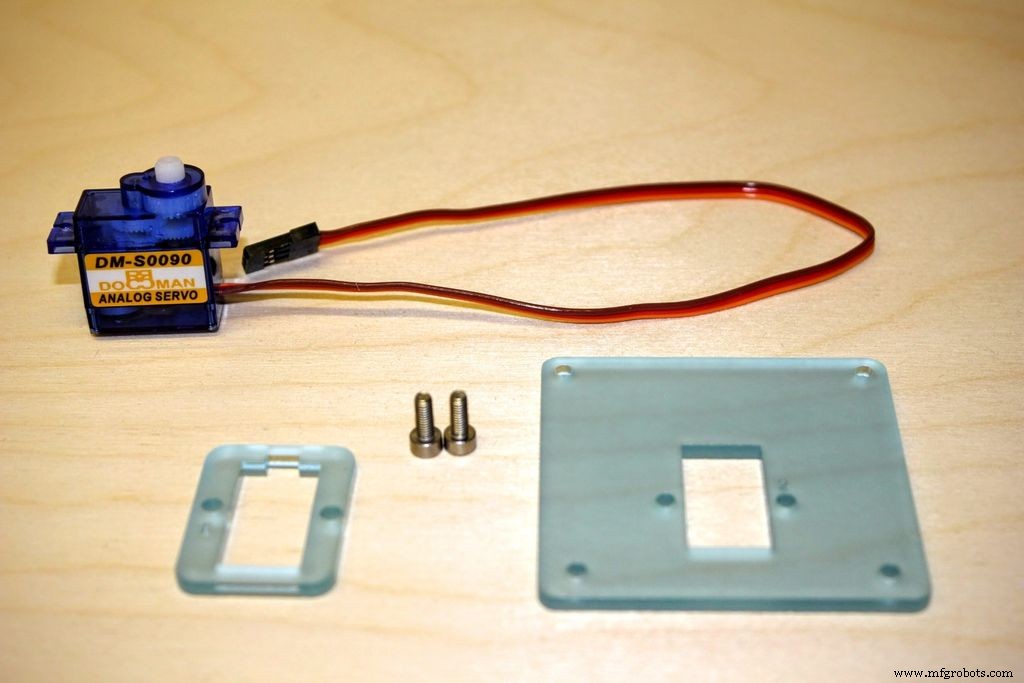
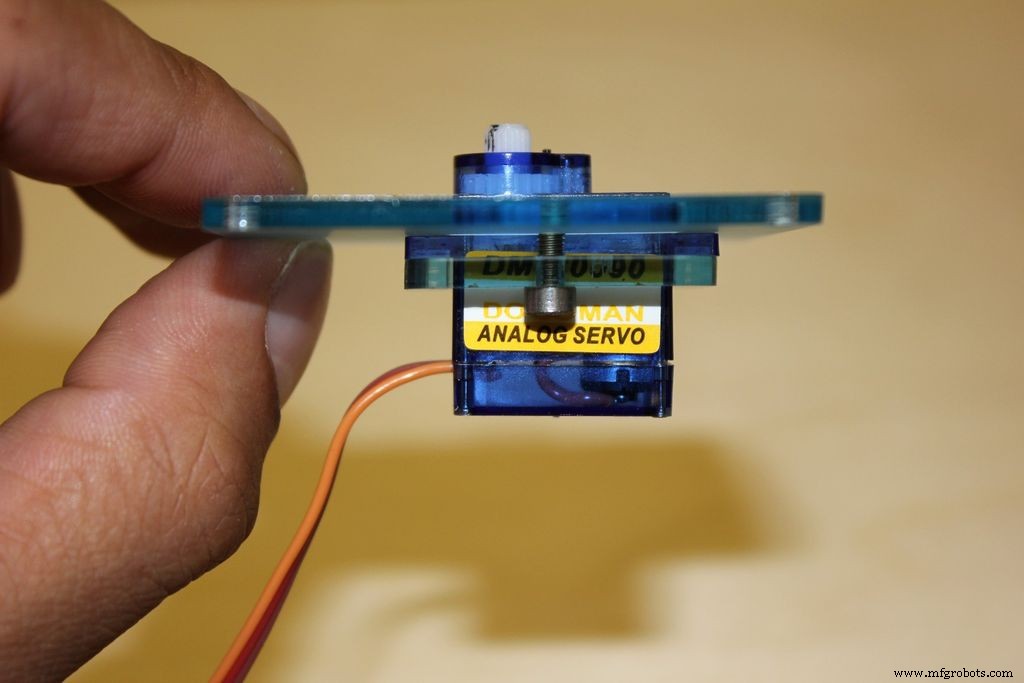
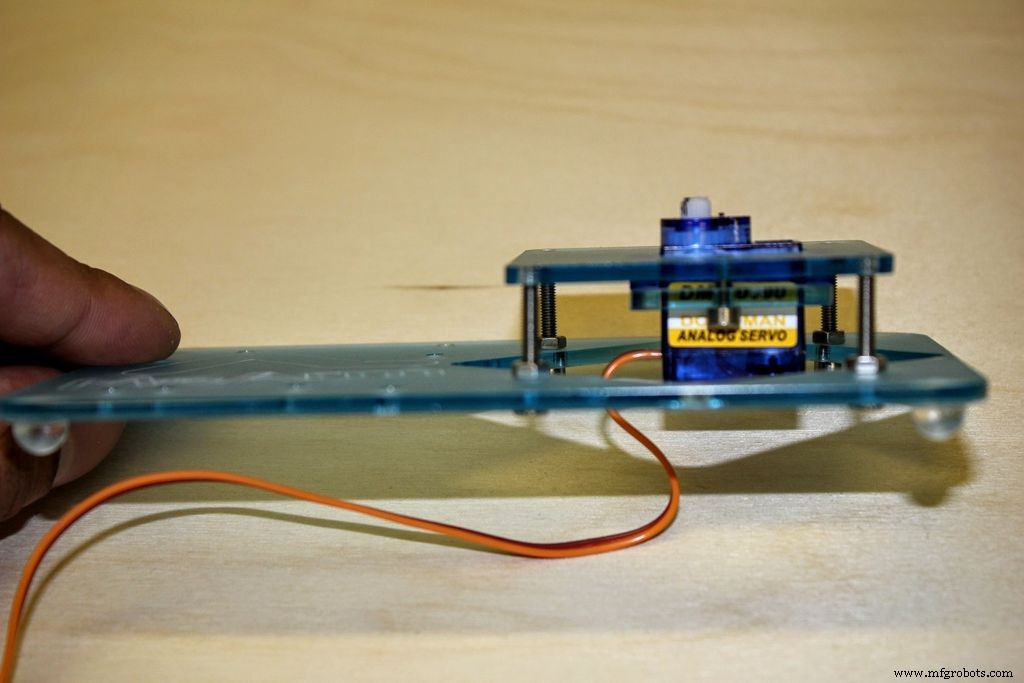
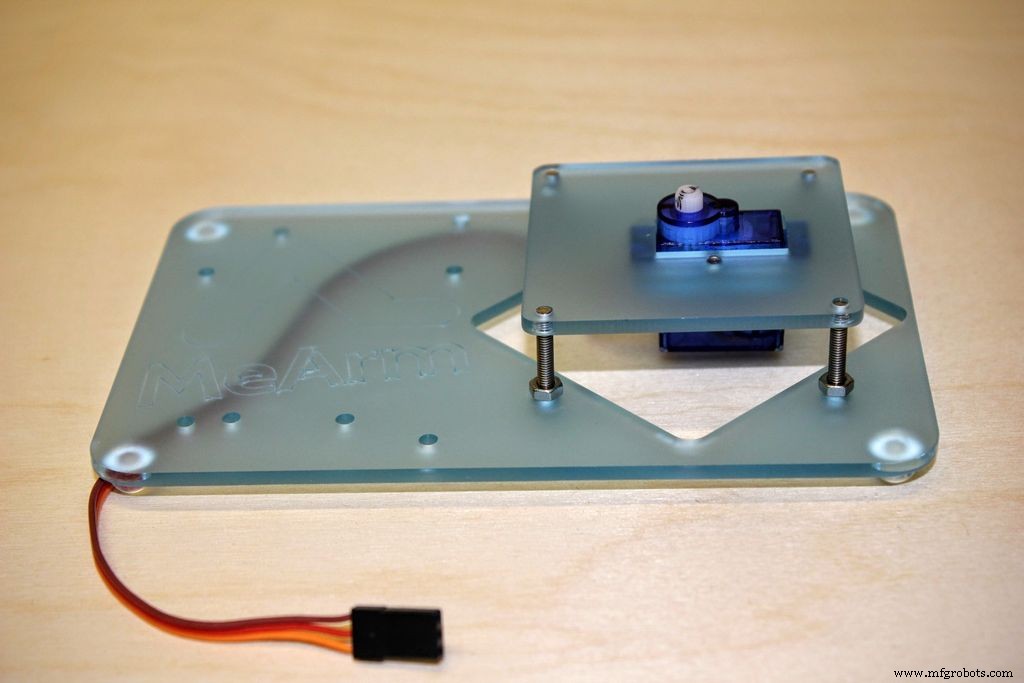
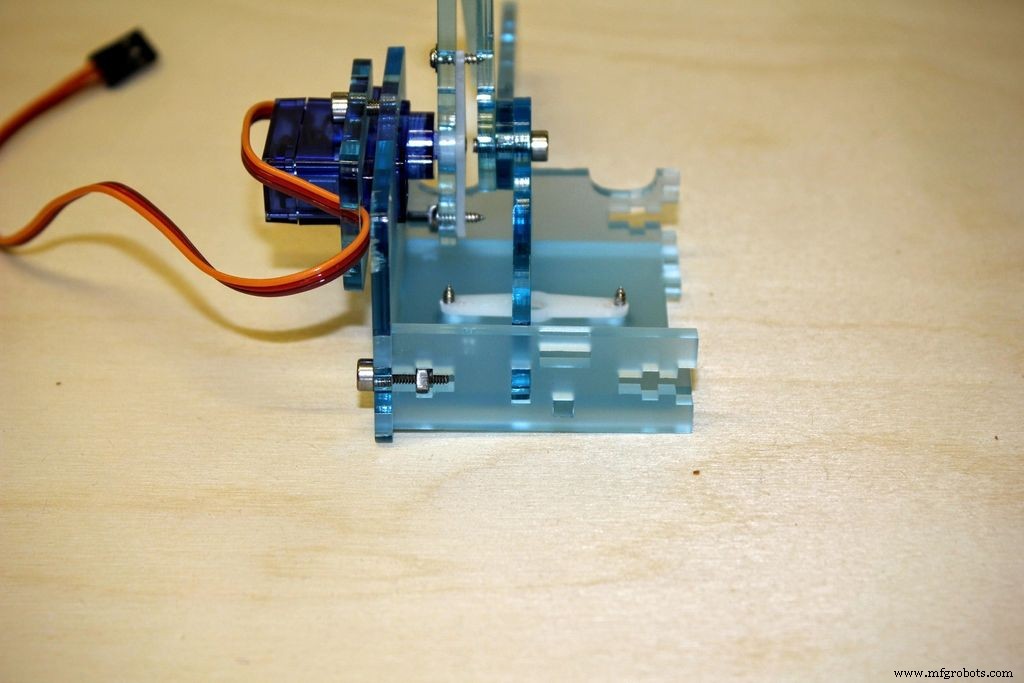
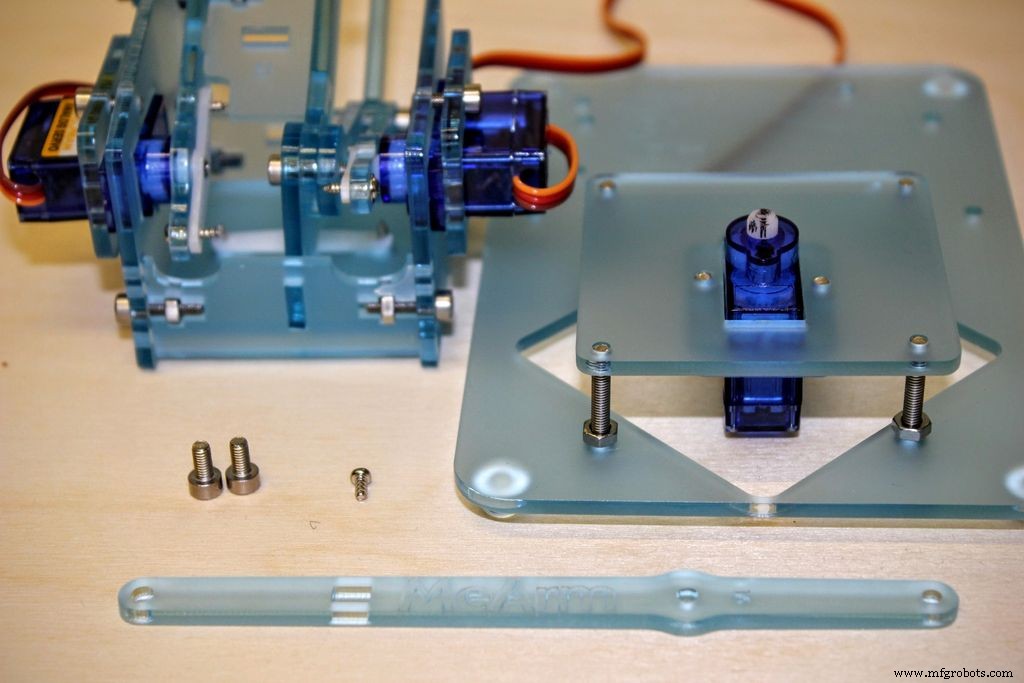
가장 큰 부분(#1)을 찾아 모서리에 접착 패드 다리를 부착합니다. 그런 다음 밑면에서 4개의 20mm 나사를 삽입하고 4개의 너트를 반쯤 조입니다. 이제 부품 #2, #3, 센터 서보 및 2개의 8mm 나사를 찾으십시오. 우리가 칼라라고 부르는 부품 #3에 서보를 끼웁니다. 칼라를 통해 나사를 밀어 넣은 다음 부품 #2에 나사로 고정합니다.
나사는 부품 #2에 자동으로 끼워지며, 이는 나사가 자체적으로 절단된다는 것을 의미합니다. MeArm에는 두 개의 구멍 크기가 있습니다. 하나는 나사를 밀어넣을 수 있는 약 3mm이고 다른 하나는 나사가 자체 탭되기를 원하는 약 2.6mm입니다. 이것은 Joo의 놀라운 PlotClock에서 빌린 방법입니다.
이제 서보/칼라 어셈블리를 20mm 나사를 통해 부품 #1에 부착합니다. 이 나사는 자체 탭핑되며 부품의 구멍 방향은 잘못된 방향으로 얻을 수 없음을 의미해야 합니다. 이를 포카요케(Poka-yoke)라고 하며 설계를 속이는 방법입니다. 초기 모델 v1.0이 있는 경우 올바르게 맞추는 방법이 1/8뿐이므로(구멍을 맞출 수 없으면 부품을 뒤집어서) 이것에 대한 제 시도가 지나치게 열성적이라는 것을 알 수 있습니다. 이후 버전은 Scott Pierce의 조언에 따라 조정되었으며 1/2 방법이 있습니다.
4단계:왼쪽
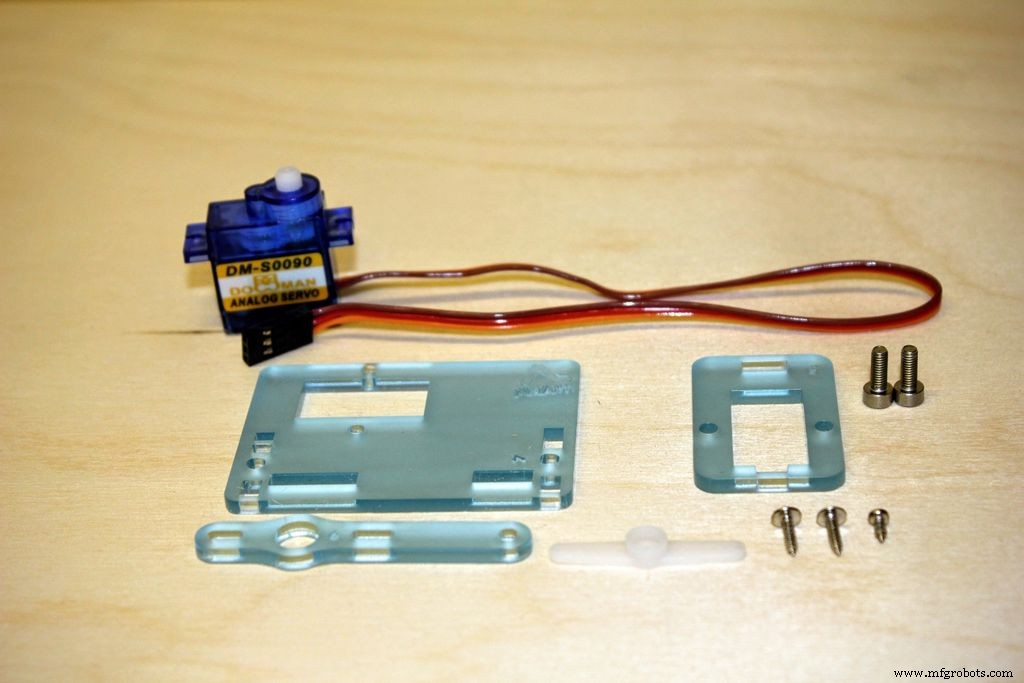
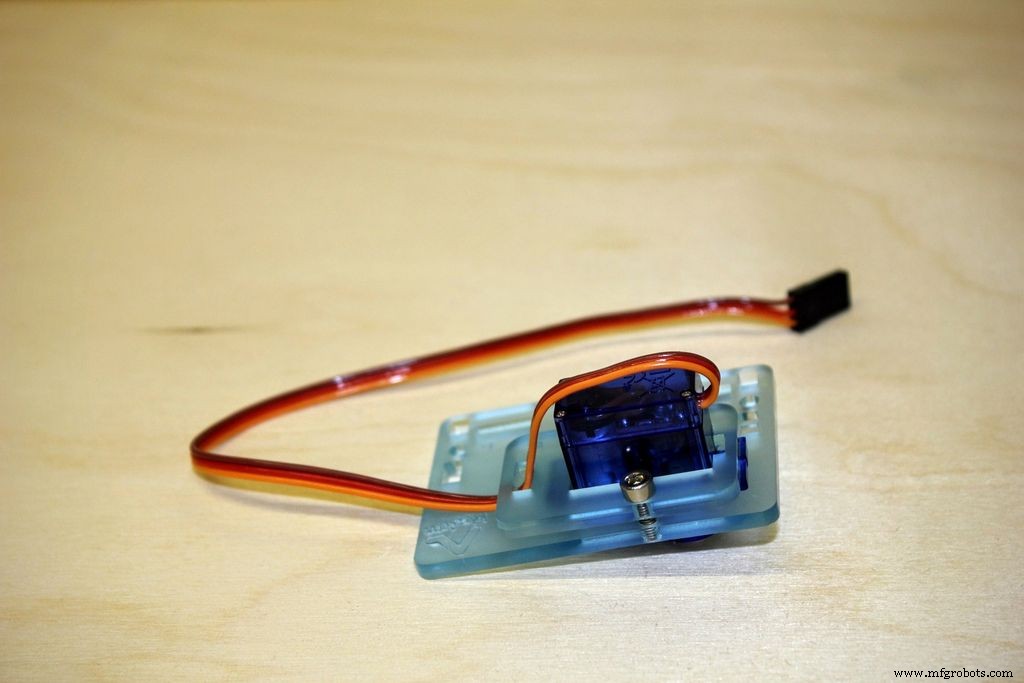
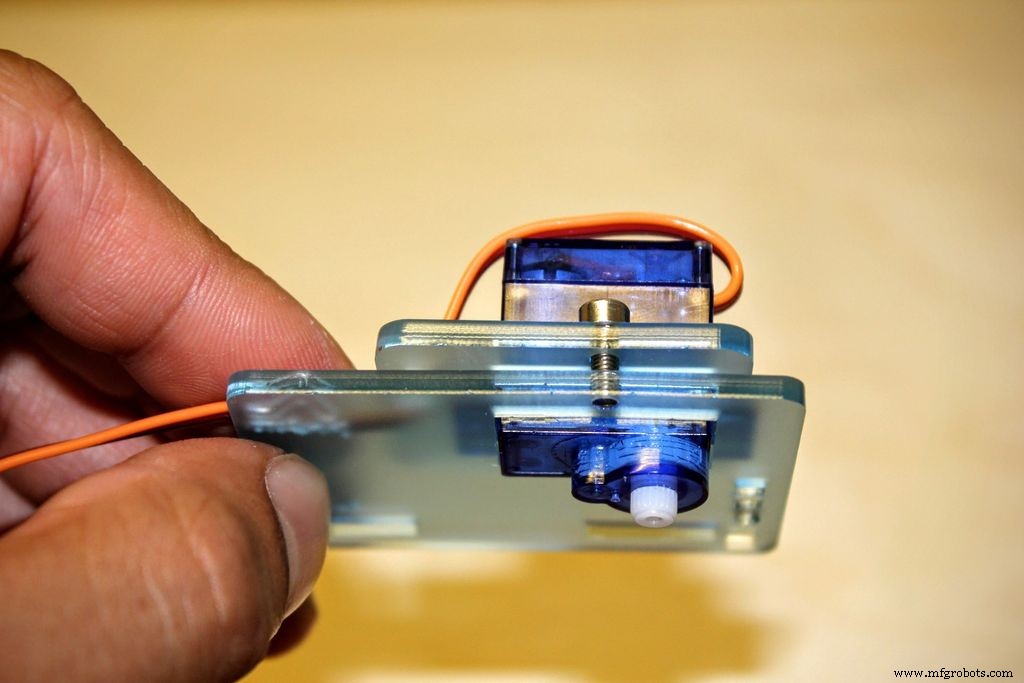

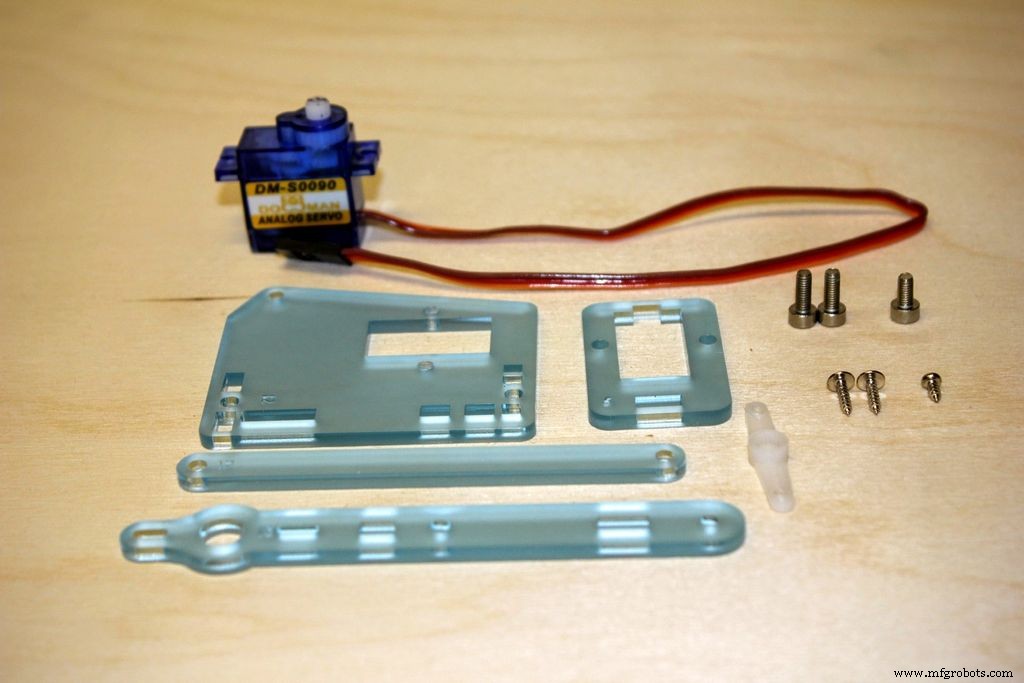
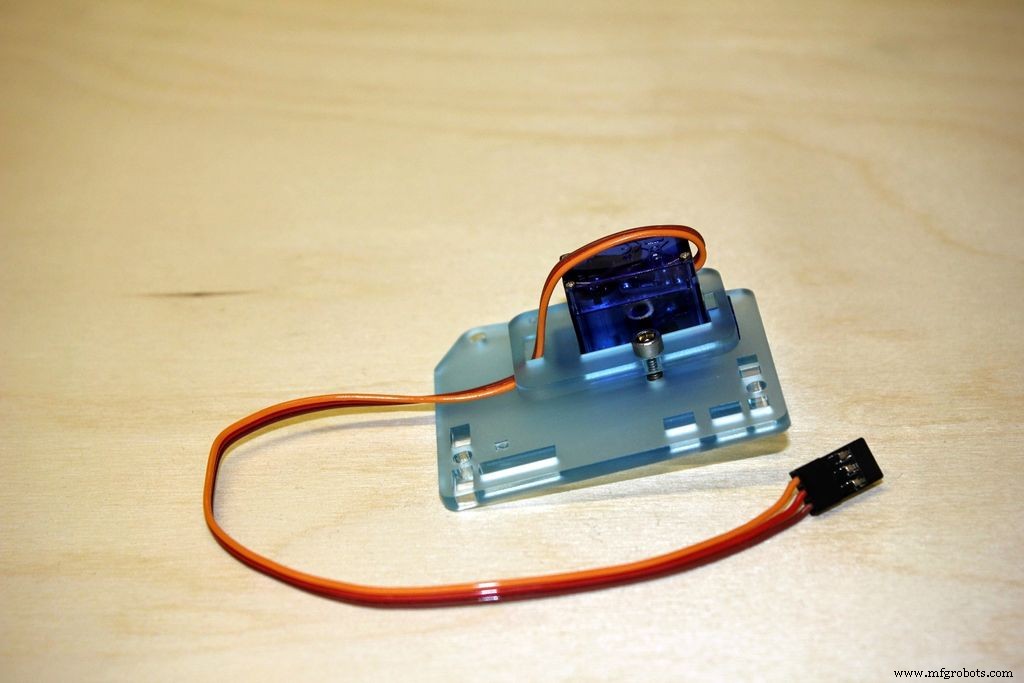
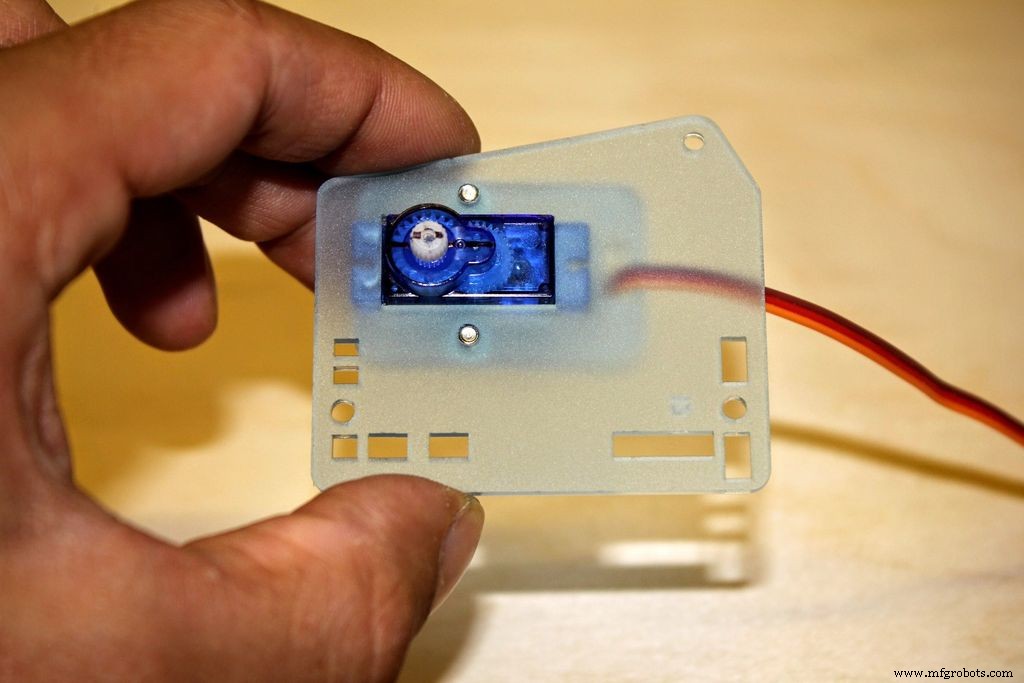
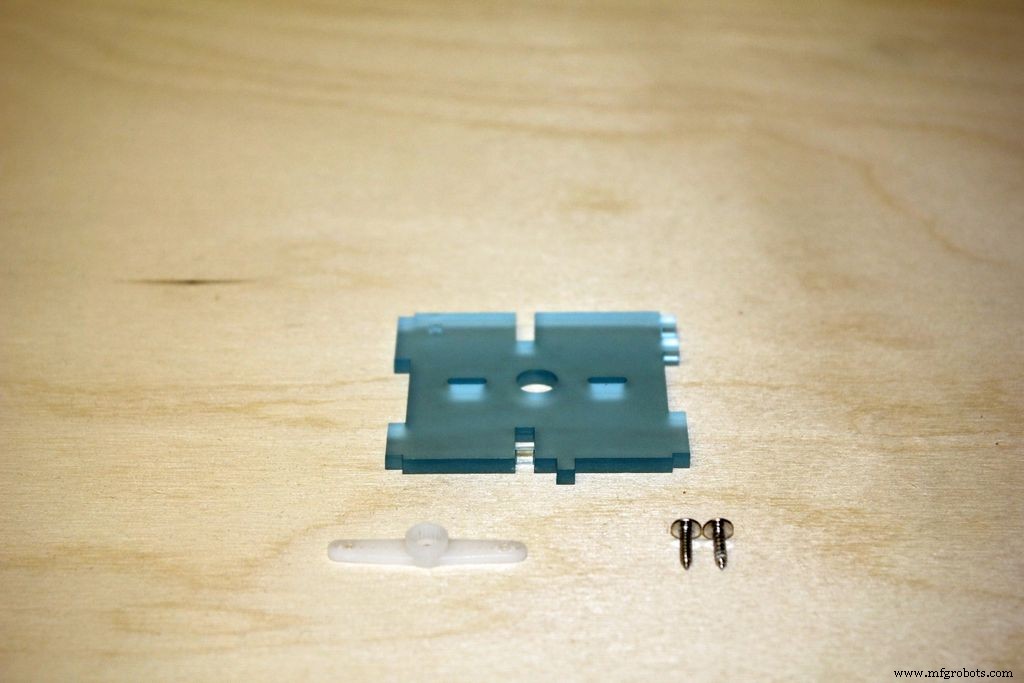
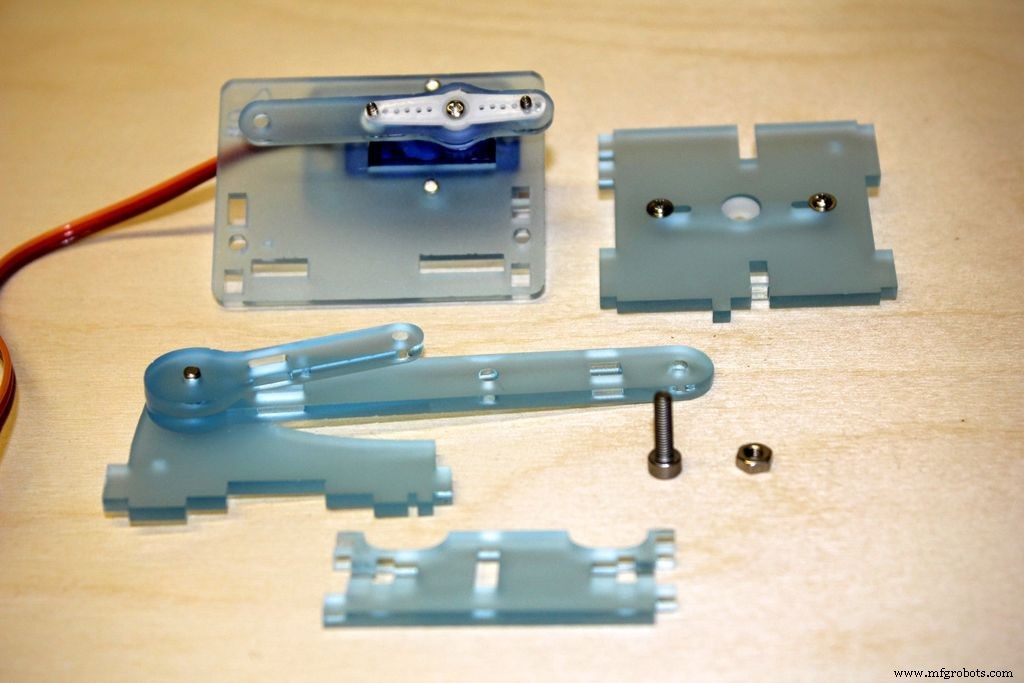
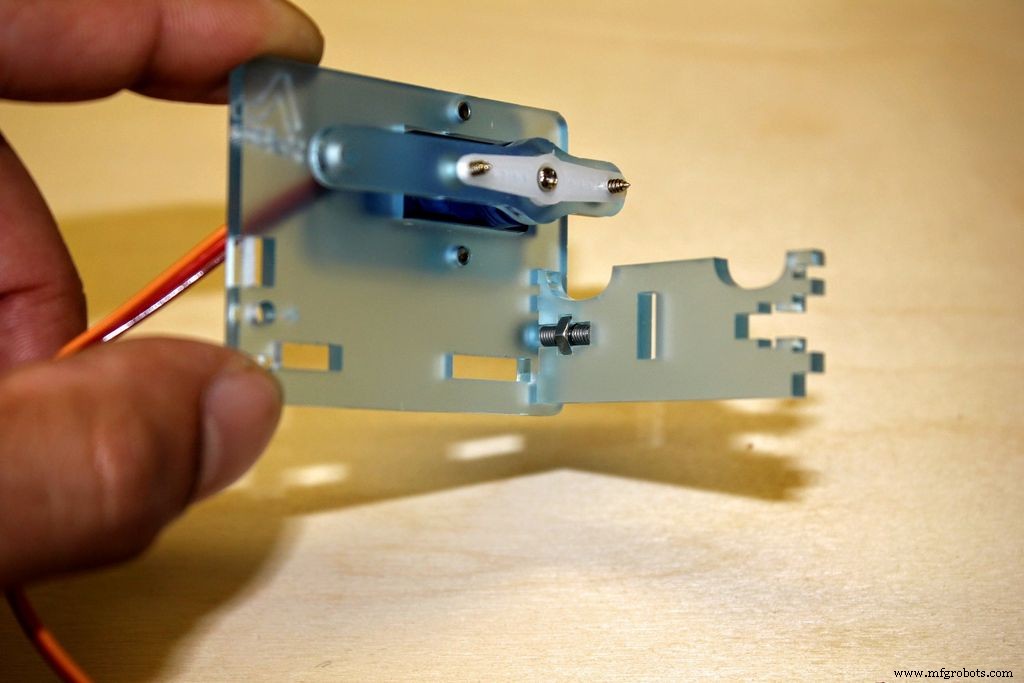
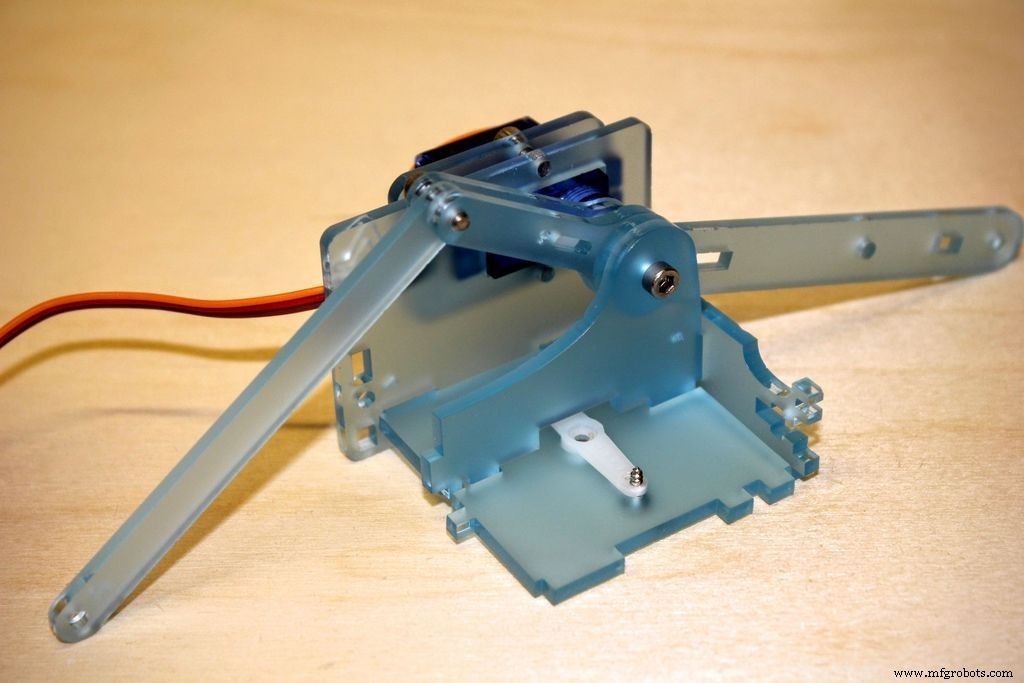
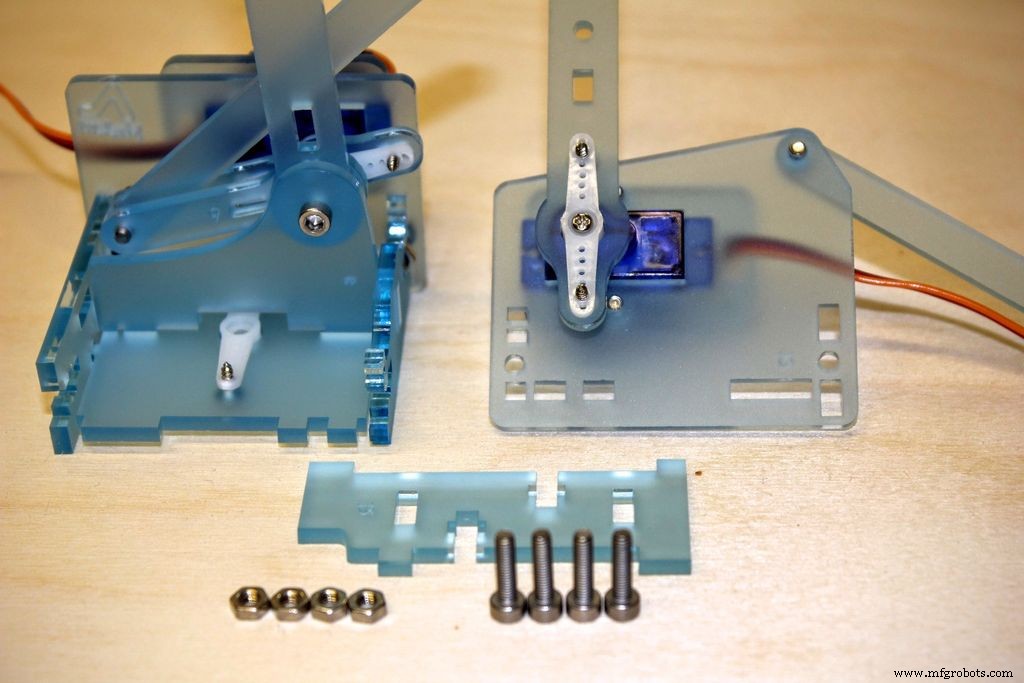
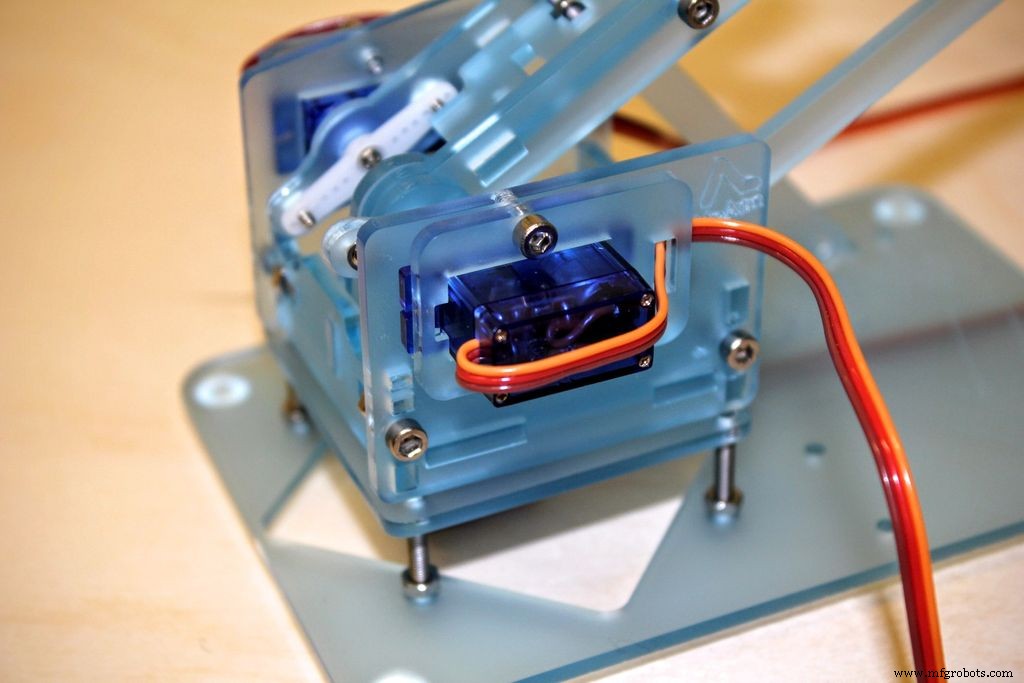
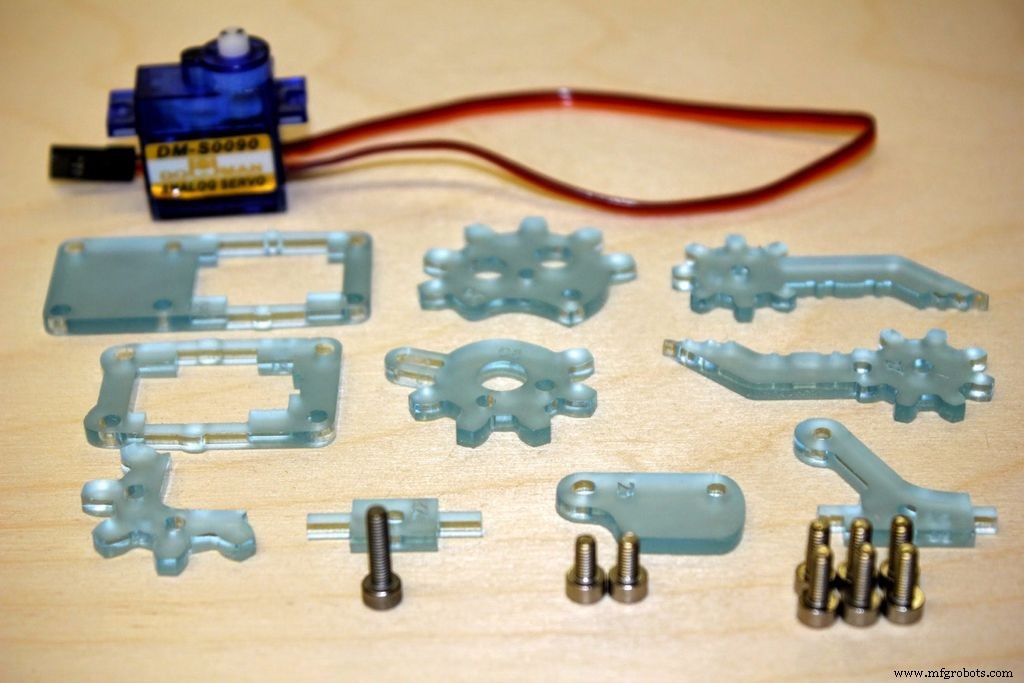
이제 부품 #4, #5, #6, 왼쪽 서보, 2개의 8mm 나사 및 서보 고정 팩을 찾습니다.
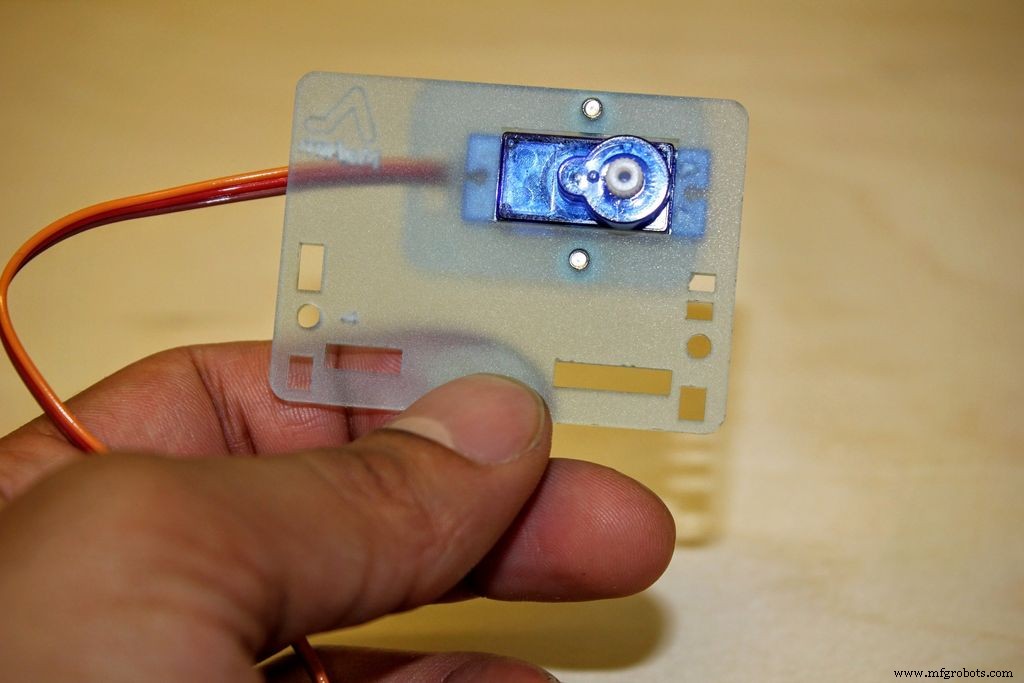
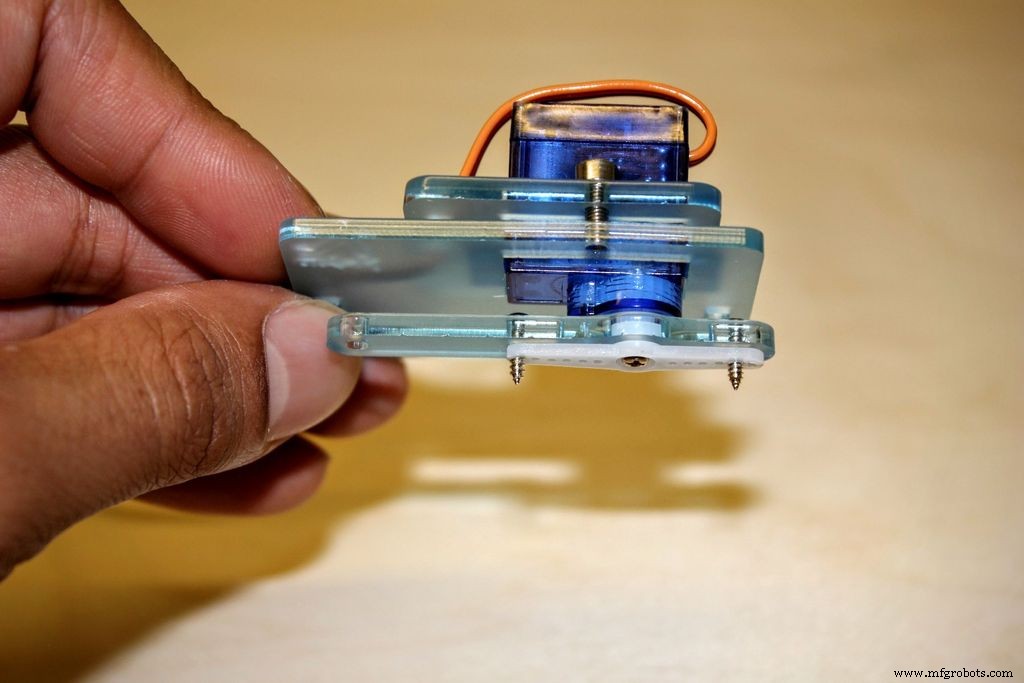
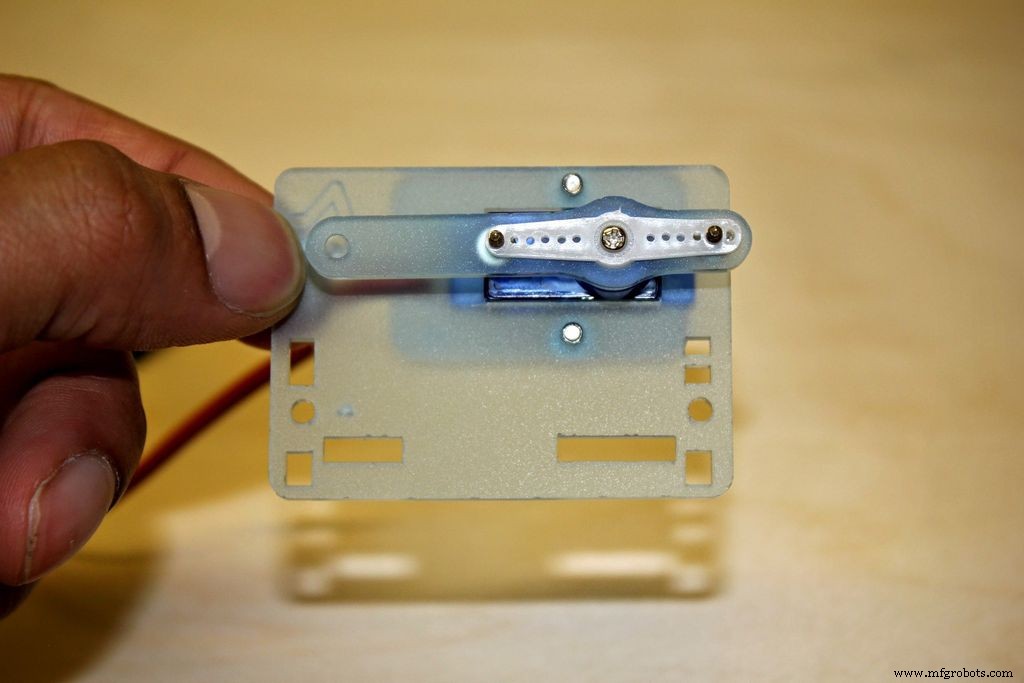
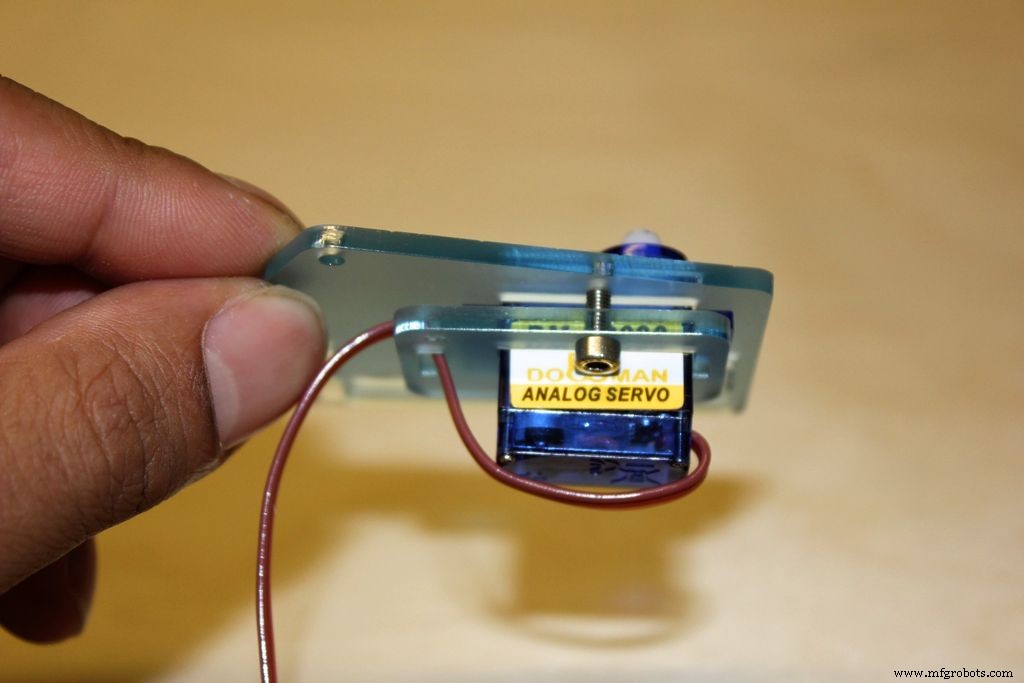
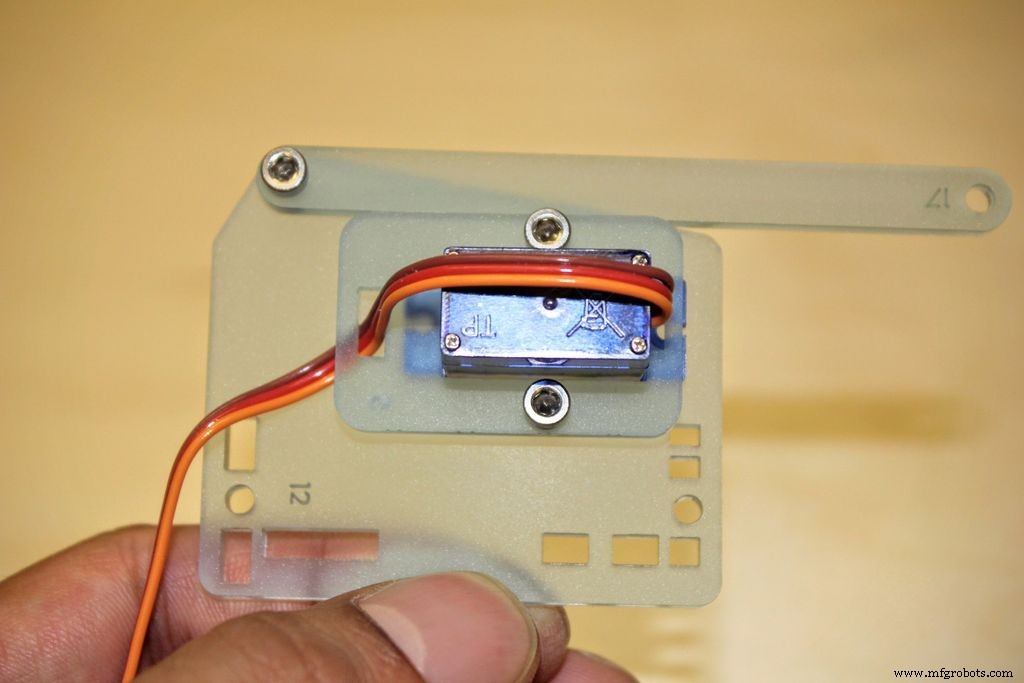
칼라(부품 #5)를 통해 서보를 끼운 다음 케이블 정리 구멍을 통해 서보 케이블을 끼웁니다. 과도하게 조이지 않도록 주의하여 8mm 나사를 사용하여 칼라를 부품 #4에 조입니다. . 아크릴이 구부러지는 것을 원치 않으시면 서보를 제자리에 잡으세요.
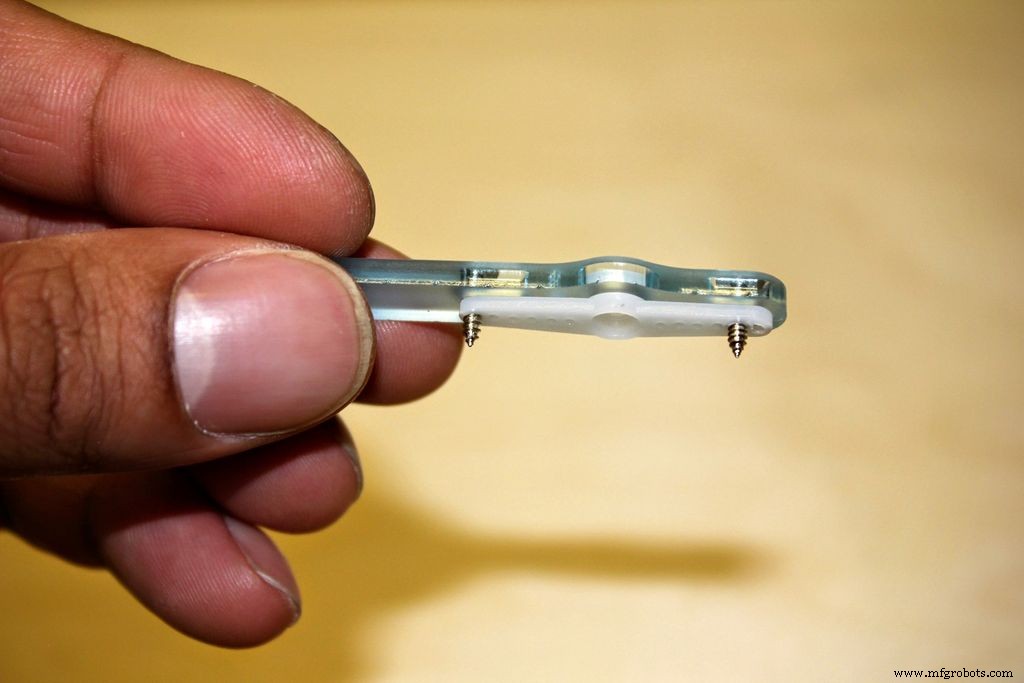
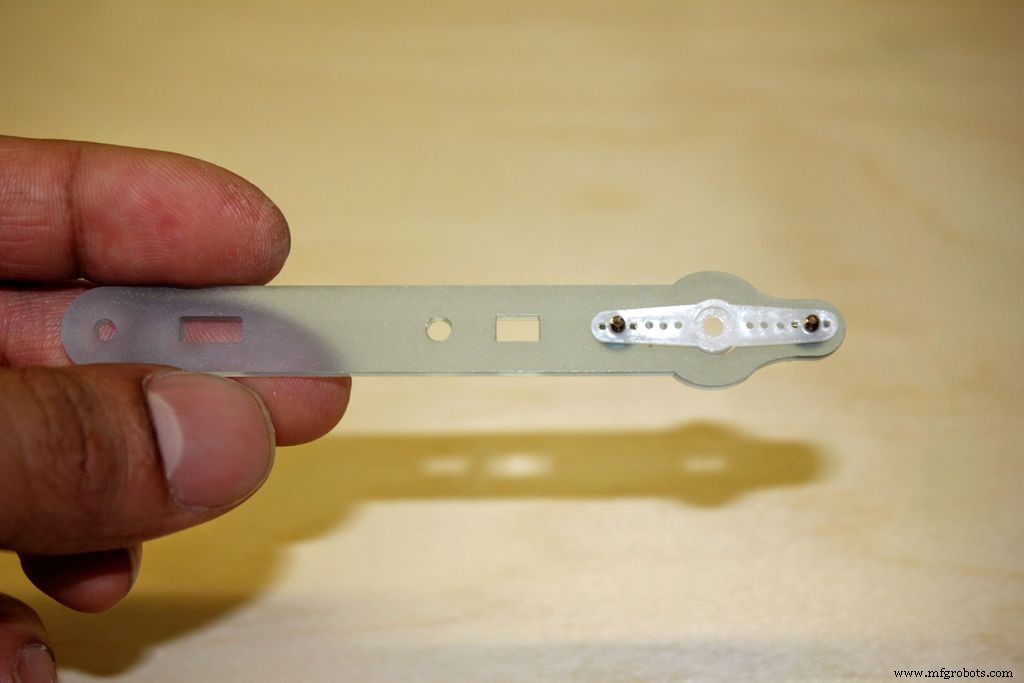
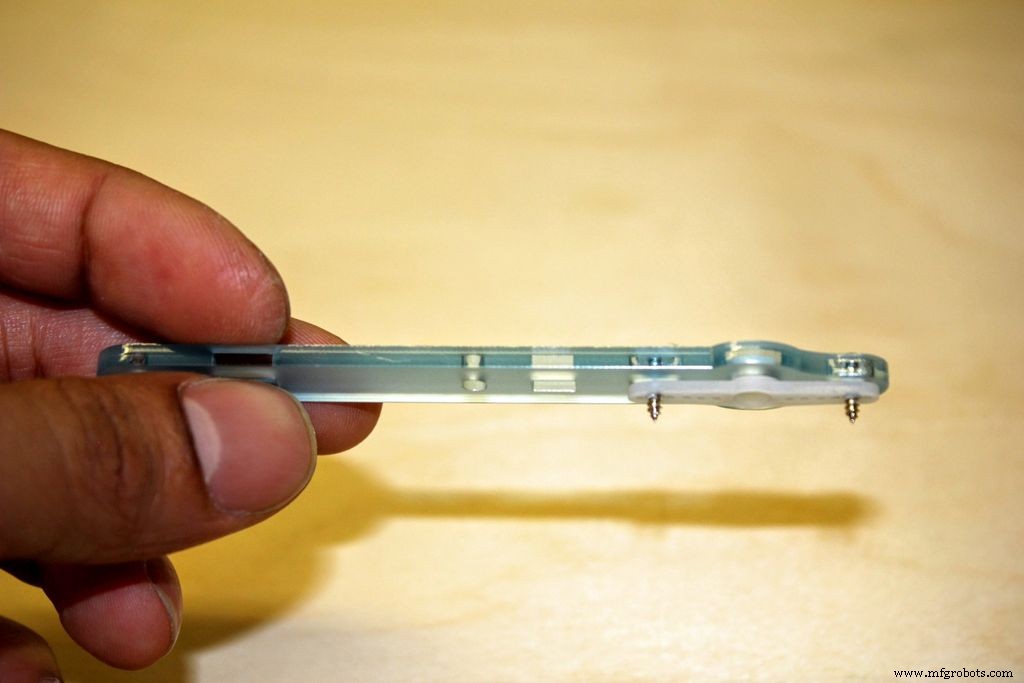
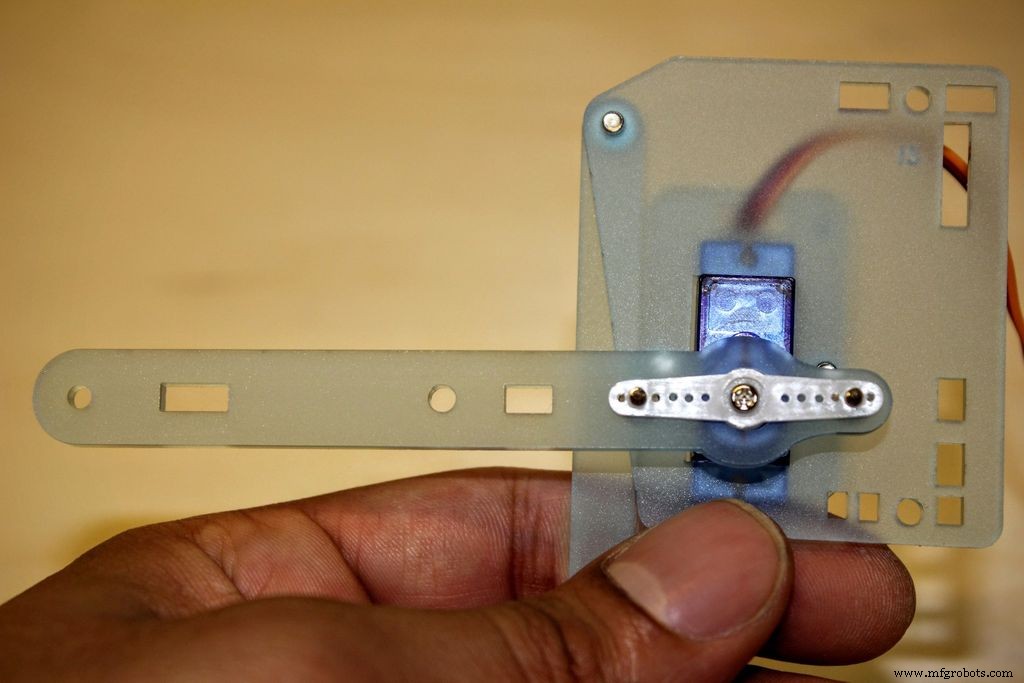
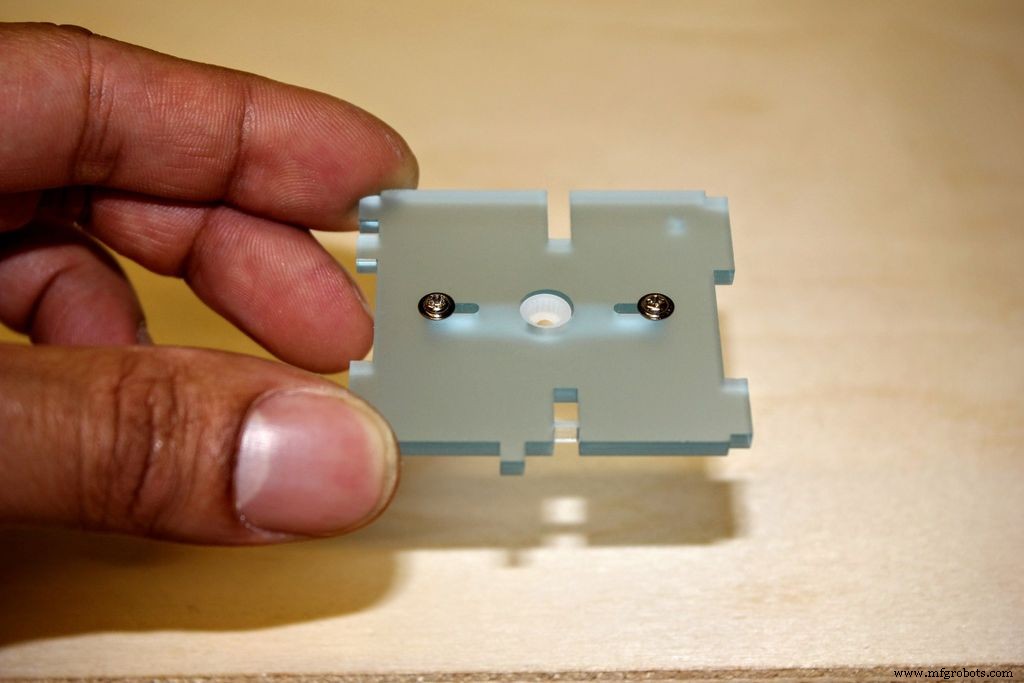
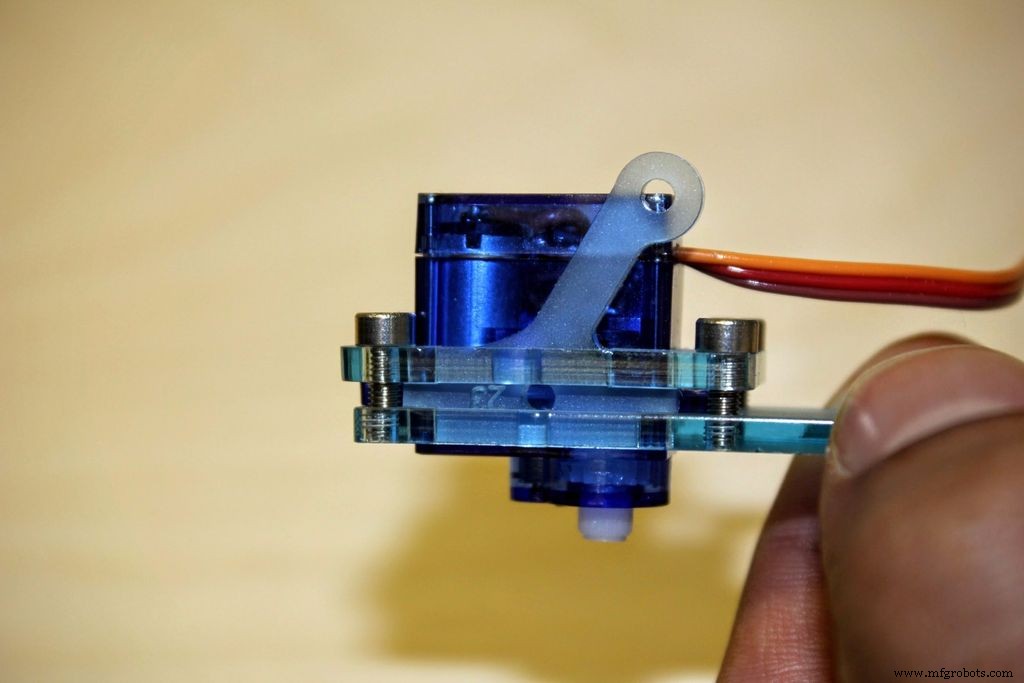
이제 서보 고정 팩의 날카로운 나사를 사용하여 서보 고정(흰색 것, 혼이라고 함)을 서보 암(#6)에 부착합니다. 이들은 흰색 플라스틱 서보 혼에 자동으로 탭됩니다. 약간 까다로울 수 있으므로 여기에서 주의하시기 바랍니다. 자녀와 함께 건물을 짓고 있다면 제때에 참여하고 싶을 것입니다.
그림과 같이 보정된 서보에 서보 고정 장치를 부착합니다. 부품 #4의 가장 긴 면과 평행해야 하며 이전에 그린 선은 여전히 일치해야 합니다. 서보 팩의 작은 기계 나사를 사용하여 서보에 고정하되 다시 너무 조이지 마십시오!
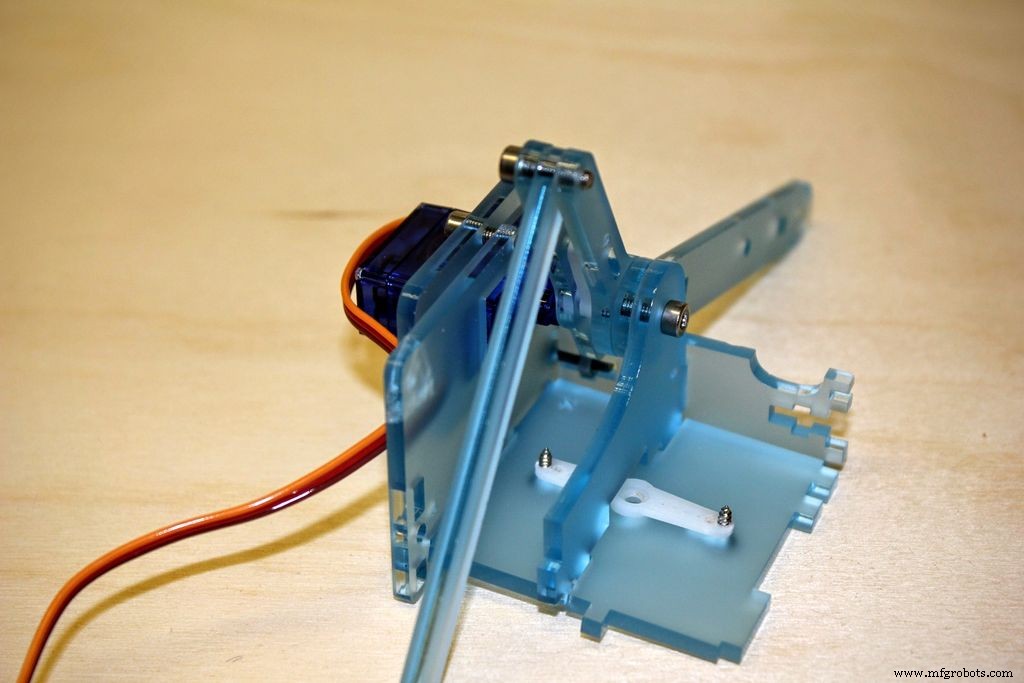
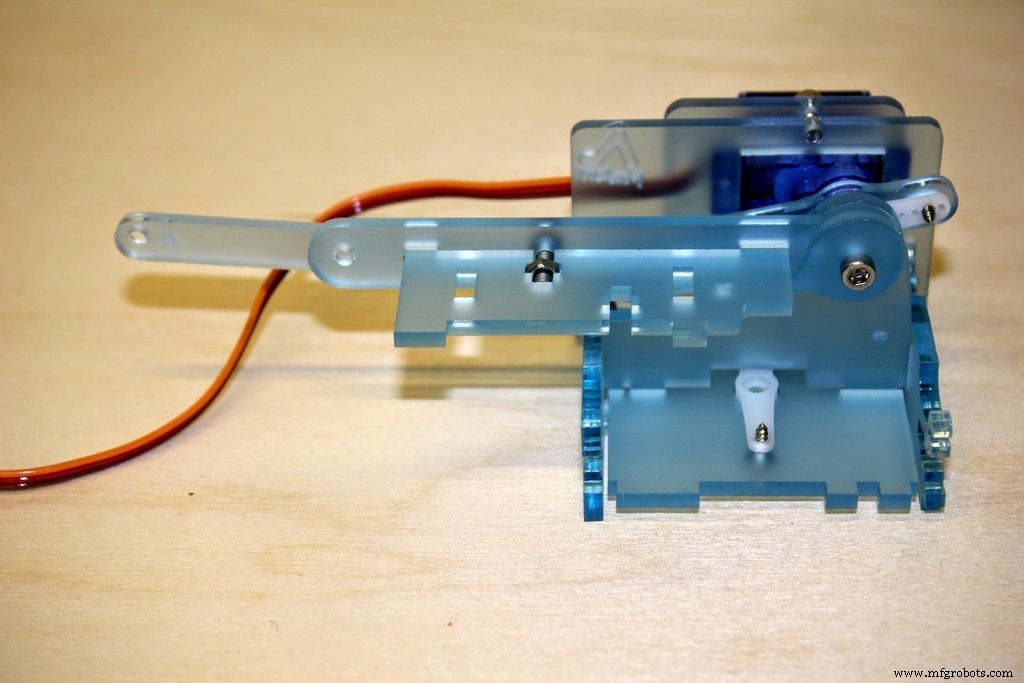
5단계:오른쪽
여기서 원하는 부분은 다음과 같습니다.
#5, #12, #13, #17, 8mm 나사 2개, 6mm 나사, 오른쪽 서보 및 서보 고정 팩.
8mm 나사로 측면 플레이트에 부착하기 전과 같이 깔끔하게 케이블을 통해 케이블을 칼라에 끼우고 다시 너무 조여서 플레이트가 부러지지 않도록 주의하십시오. 이전과 같이 날카로운 나사를 사용하여 흰색 서보 혼을 서보 암(#13)에 부착합니다. 이것을 측면 플레이트의 가장 긴 면에 90도 각도로 암을 사용하여 서보에 부착합니다. 다시 한 번 만든 검은색 선이 정렬되어야 합니다.
마지막으로 이 단계에서 6mm 나사를 사용하여 부품 #17을 측면 플레이트에 부착합니다.
6단계:중간 구축
이 부품은 왼쪽 및 오른쪽 섹션을 함께 연결합니다. 우리는 그들을 베이스와 돼지라고 부릅니다.
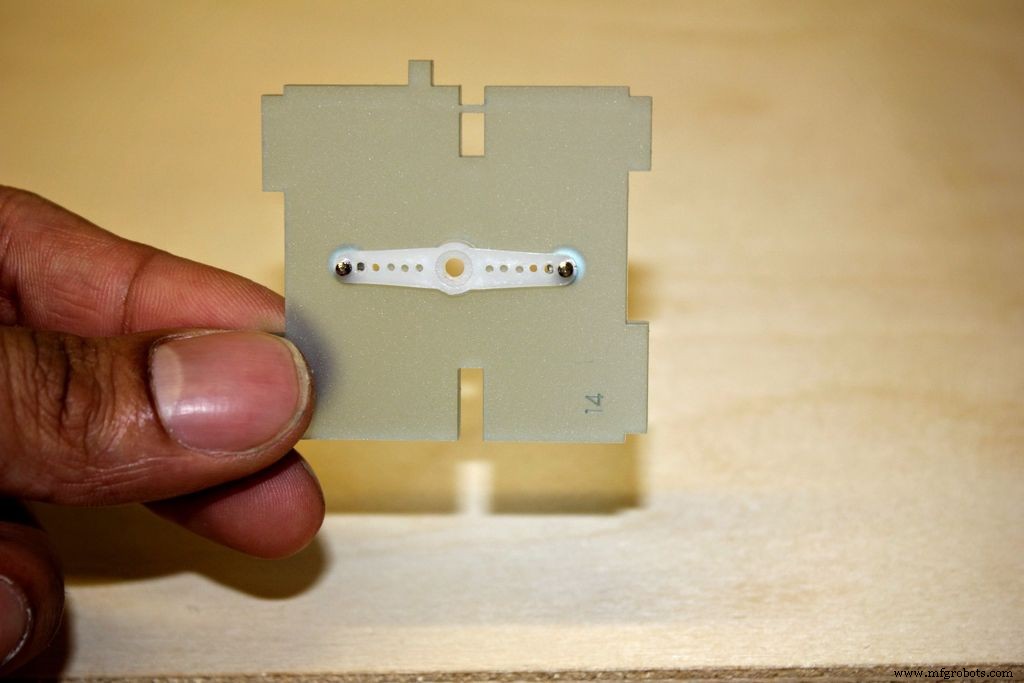
베이스 찾기 부품 #14 및 서보 고정 팩. 방향에 주의하여 날카로운 나사를 사용하여 서보 혼을 부착합니다. 이 단계에서 물건을 제대로 가지고 있는지 확인하기 위해 왼쪽 조각까지 제공합니다. 포카요킹은 여기에서 길을 알려줘야 합니다.
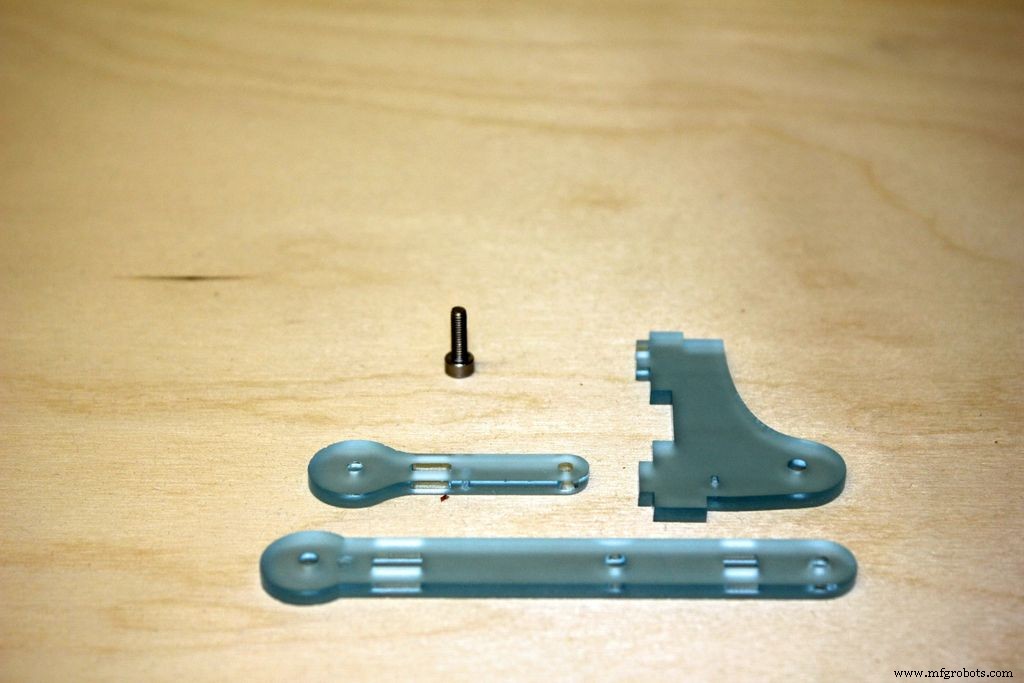
돼지의 경우 부품 #8, #9, #10 및 10mm 나사를 찾습니다. 표시된 순서대로 나사를 조입니다. #9, #10, #8이 되어야 합니다. 나사는 #8 쪽에서 들어가고 #9에 셀프 태핑됩니다. 순서가 헷갈려서 죄송합니다만 솔직히 숫자로 적어본 것은 이번이 처음입니다! 이것들이 직선 경로로 축(나사)을 중심으로 움직이고 자유롭게 움직이는 것이 중요합니다. 직선 경로로 움직이지 않으면 나사를 풀고 함께 잡고 다시 조여 최대한 평행이 되도록 합니다.
7단계:왼쪽에서 가운데
이제 가운데 부분을 사용하여 왼쪽과 오른쪽 부분을 합치기 시작하려고 합니다.
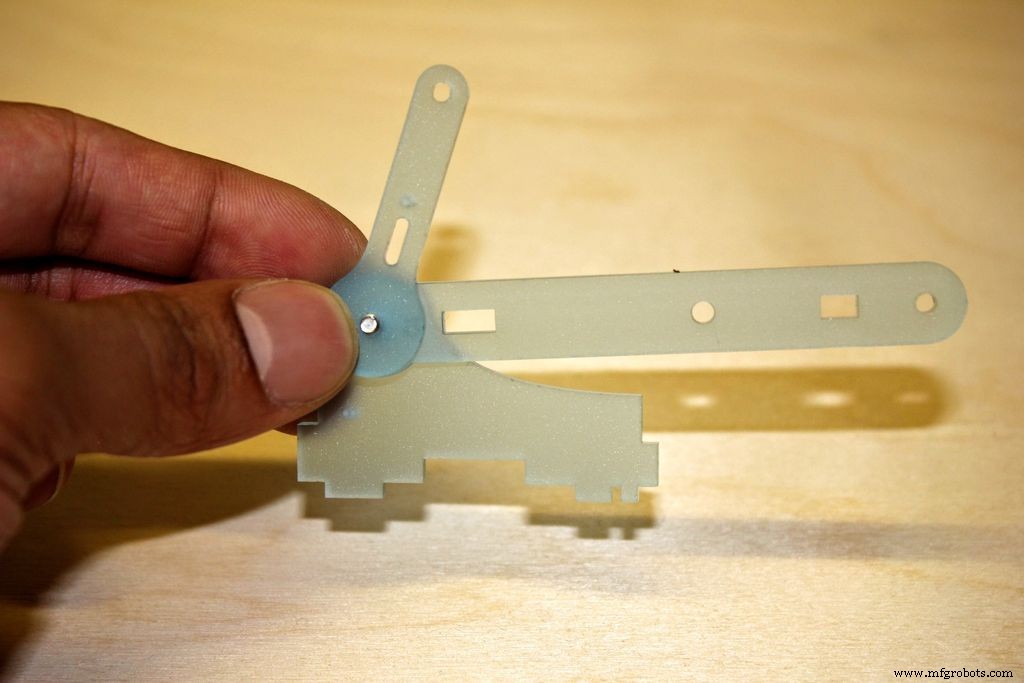
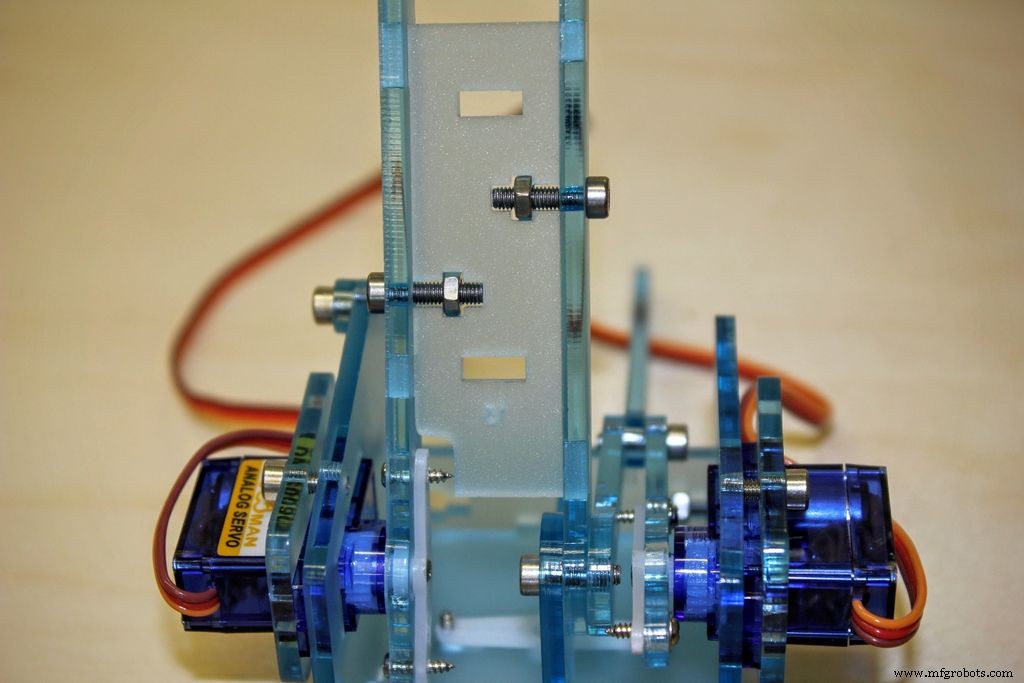
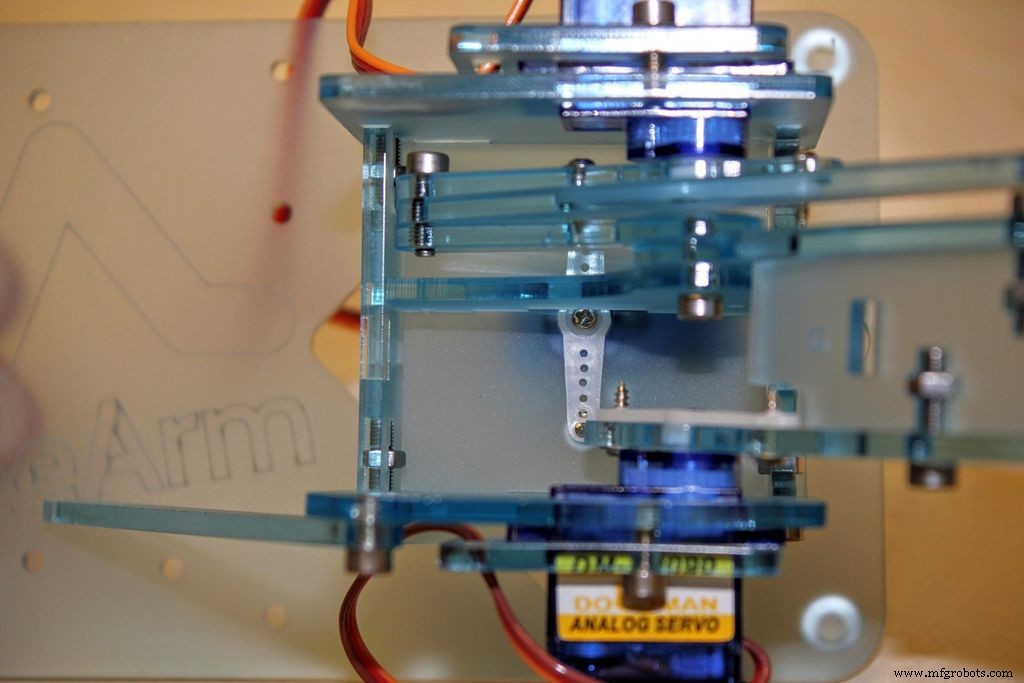
먼저 왼쪽 어셈블리를 12mm 나사와 너트로 부품 #7에 부착합니다. 이를 수행하는 가장 쉬운 방법은 왼쪽 어셈블리를 통해 12mm 나사를 누르고 너트를 반 바퀴 정도 돌리는 것입니다. 부품 #7의 슬롯을 너트 위에 놓고 나사를 조이기 시작합니다. 과도하게 조이지 마십시오.
부품 #7(전면 스트럿)에 돼지용 슬롯이 표시되어야 합니다. 돼지를 슬롯에 넣은 다음 베이스 부품을 왼쪽 어셈블리의 슬롯에 삽입하고 레버를 위로 올려 돼지의 슬롯을 결합합니다. 여기에서 서보 혼을 다시 확인하십시오. 거꾸로 되어 있으면 나중에 정말 짜증이 날 것입니다.
돼지가 제자리에 있으면 레버(#17), 옵션 스페이서(#20)를 서보 레버(#6)에 부착하고 돼지의 레버(#9)를 여부에 따라 12mm 또는 10mm 나사와 함께 부착할 수 있습니다. 스페이서가 필요합니다. 여기에서 볼 수 있는 Doman 서보에는 스페이서가 필요하지 않지만 우리가 사용하는 최신 서보에는 스페이서가 필요합니다. 이를 위한 예비 부품이 있습니다.
이제 전면 스트럿과 같이 12mm 나사와 너트를 사용하여 11번 부품 후면 스트럿을 부착합니다. 돼지의 뒤쪽과 바닥판의 손잡이 부분에 끼워야 합니다. 이것을 조이되 약간 느슨하게 두십시오. 오른손 부분을 결합할 때 조정이 편리할 것입니다.
8단계:오른쪽 연결
이제 오른쪽을 복잡한 어셈블리에 짝짓기합니다. 여기에는 웨빙 부품 #15를 장착하는 것도 포함됩니다.
12mm 나사와 너트를 사용하여 부품 #15를 부품 #10(돼지 위)에 부착합니다.
이제 나머지 어셈블리에 오른쪽을 부착합니다. 부품을 결합하기 전에 12mm 나사와 너트를 오른쪽에 끼우거나 제거한 다음 나중에 다시 끼울 수 있습니다. 여기에서 동시에 슬롯에 여러 부품을 넣으려고 하며 까다로울 수 있습니다.
시간을 갖고 기다려 주십시오. 이 단계는 전체 빌드에서 가장 까다롭습니다. 이 작업을 수행하면 더 쉬워집니다!
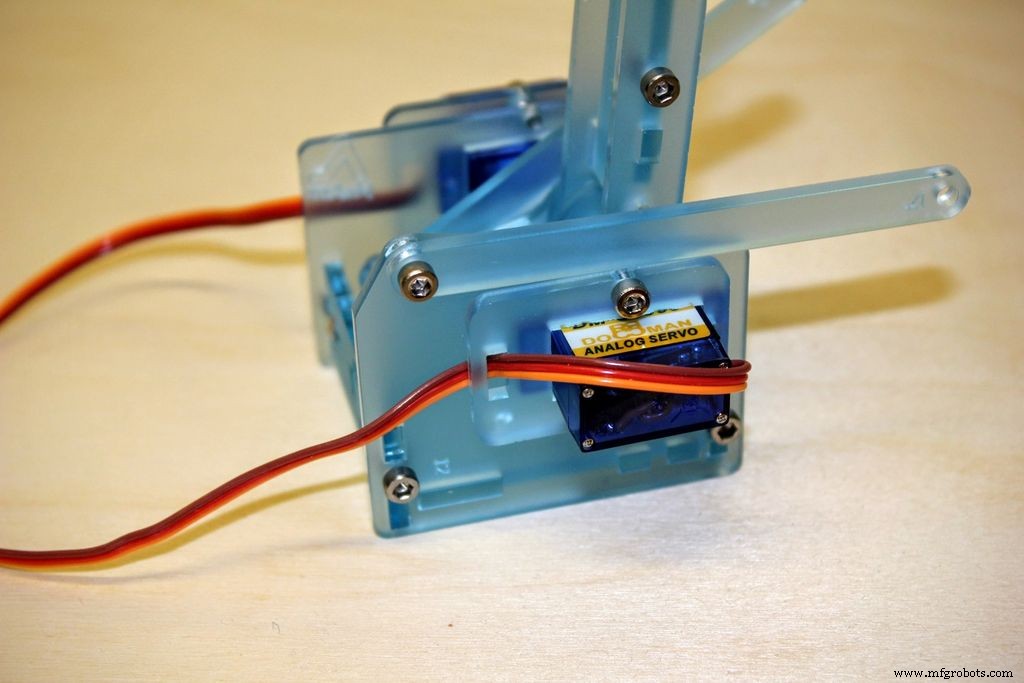
9단계:베이스에 부착, 왼쪽 팔뚝 추가
이제 멋진 센터 어셈블리가 완성되어 베이스에 나사로 고정할 수 있습니다.
이것은 서보 혼을 센터 서보에 결합하고 나사로 고정하는 문제입니다.
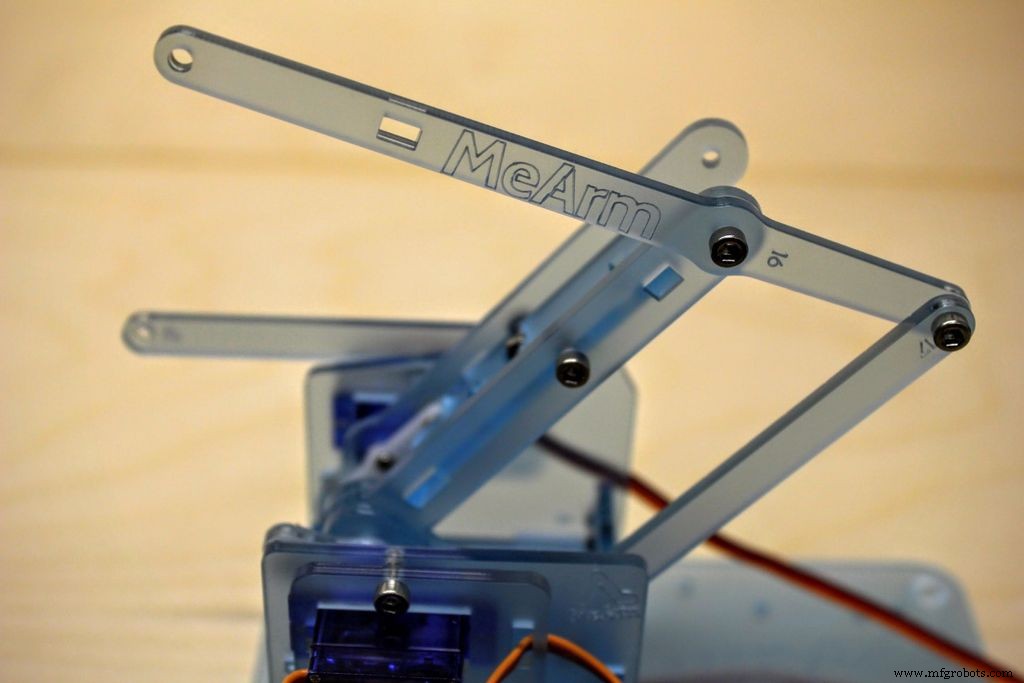
이제 2개의 6mm 나사를 사용하여 부품 #16을 추가할 수 있습니다. 이것은 부품 #10과 #17에 나사로 고정됩니다. 이 새로운 부품으로 서보를 쉽게 움직일 수 있을 것입니다!
10단계:오른쪽 팔뚝


다음으로 오른쪽 팔뚝을 만듭니다.
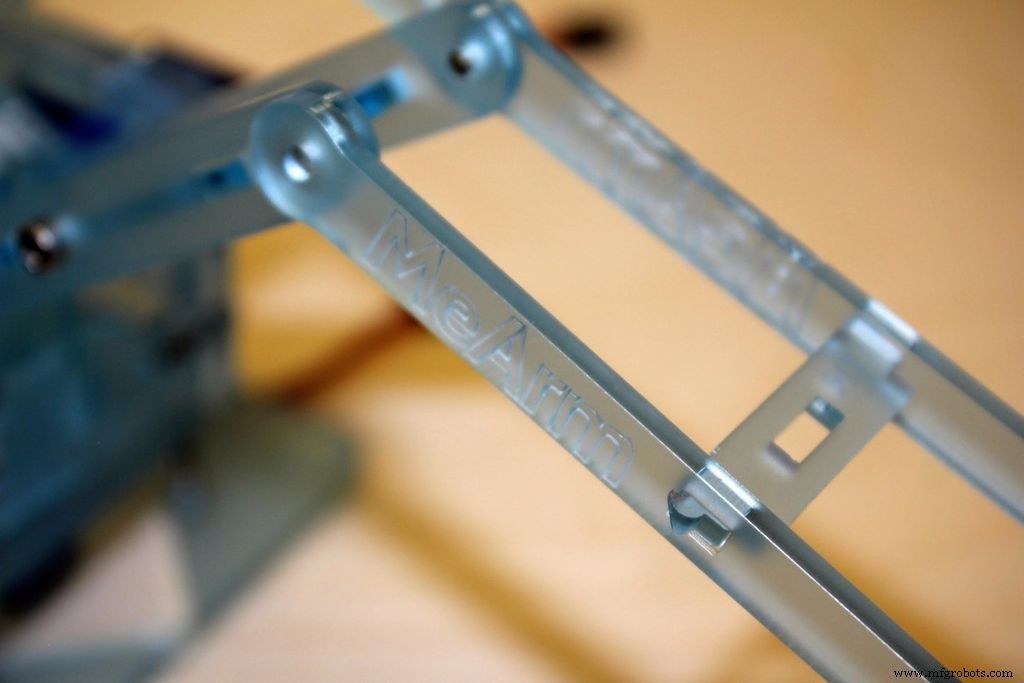
가장 먼저 할 일은 파트 #18을 방금 부착한 왼쪽 팔뚝 부분에 연결한 다음 오른쪽 팔뚝에 연결하는 것입니다. 이 부분은 번호가 매겨지지 않은 것 같아서 파트 #31이라고 부를 것입니다!
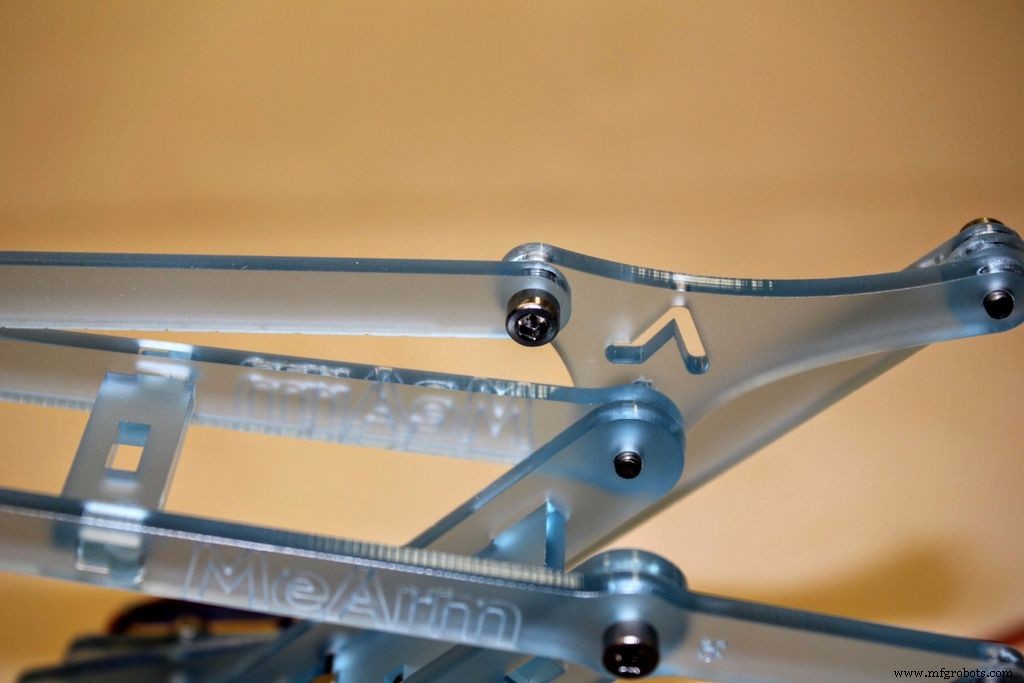
10mm 나사로 삼각형 부분 #19를 부분 #31과 부분 #13(서보에 부착된 비트)에 부착합니다. 이 모든 부품이 자유롭게 움직이도록 해야 하므로 과도하게 조이지 마십시오.
19번 부분의 뒷면을 17번 부분에 오른쪽 페이트에 붙이고 10mm 나사와 스페이서(20번)를 사이에 사용합니다.
그런 다음 6mm 나사로 최종 부품 #17을 부품 #19의 안쪽 전면에 부착합니다.
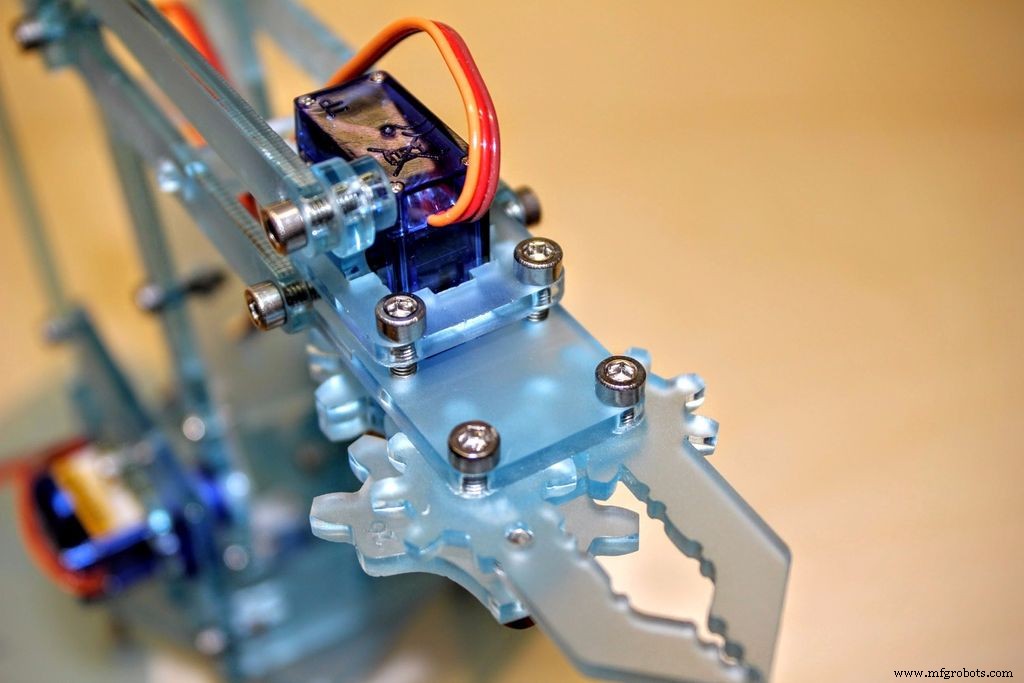
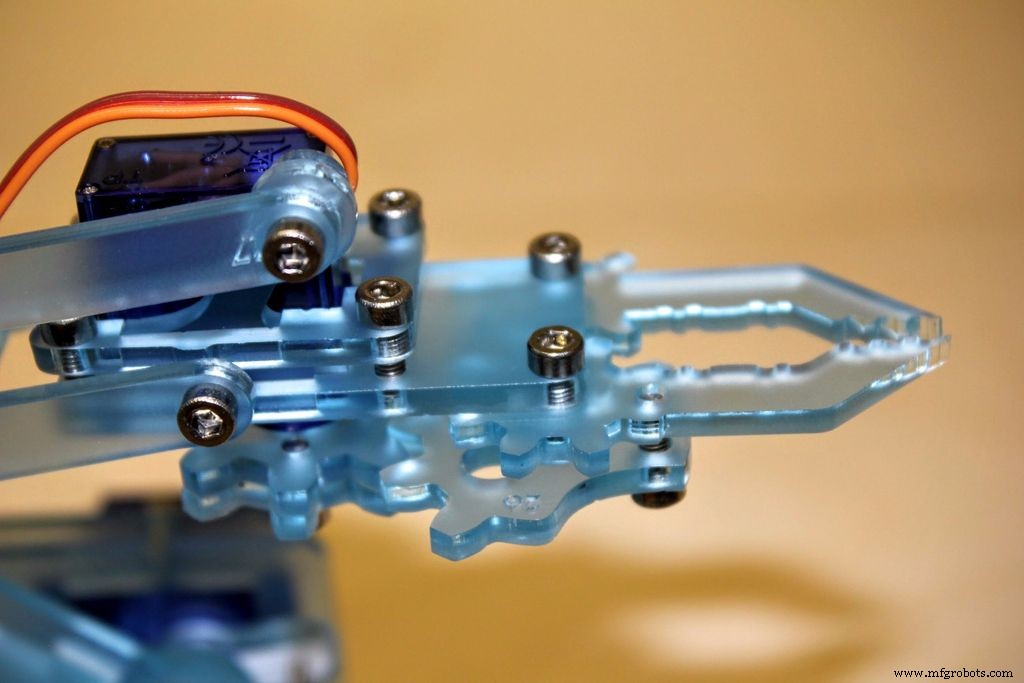
11단계:발톱을 만드세요!
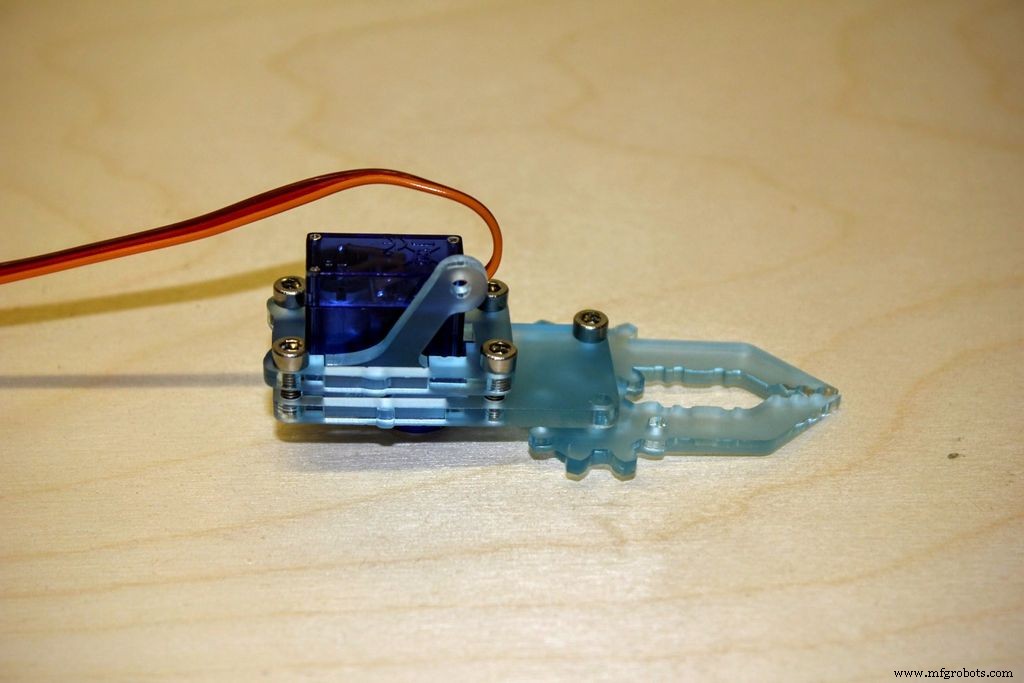
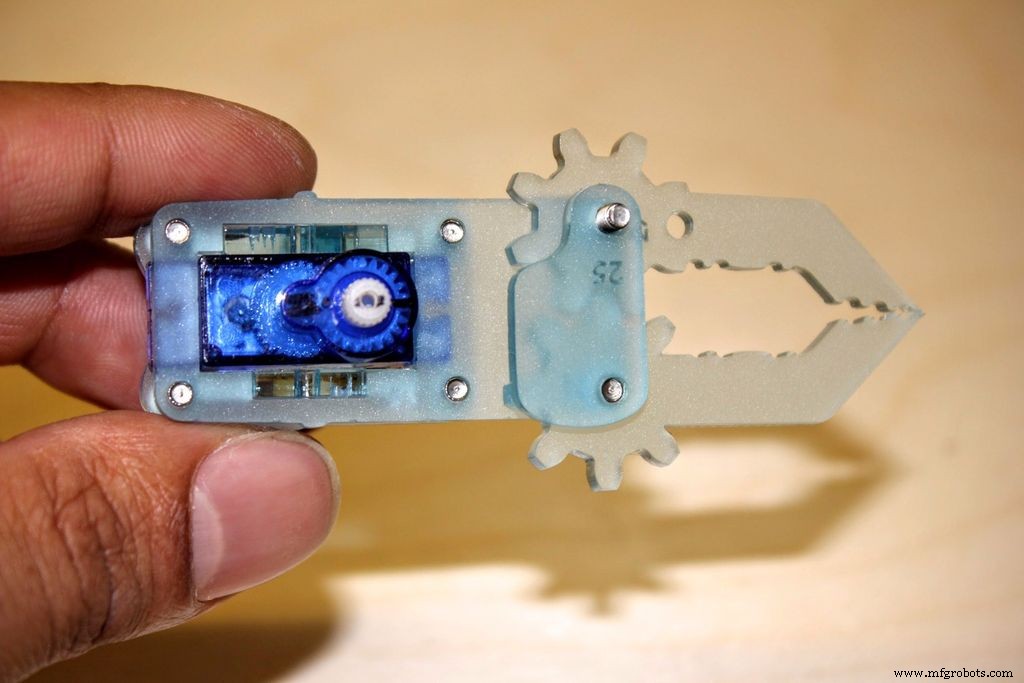
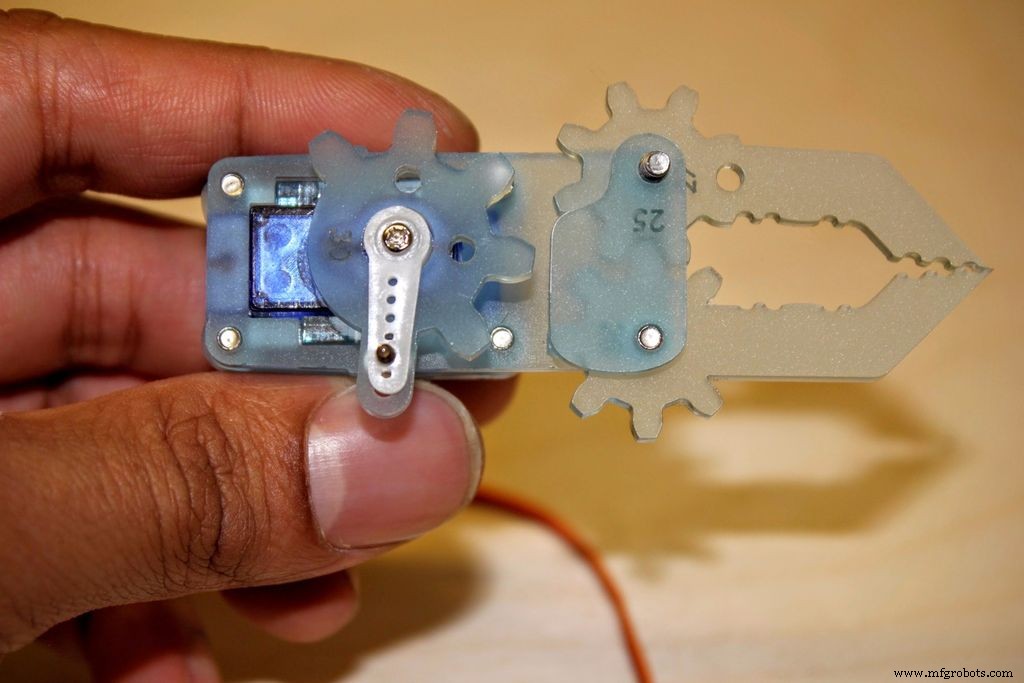
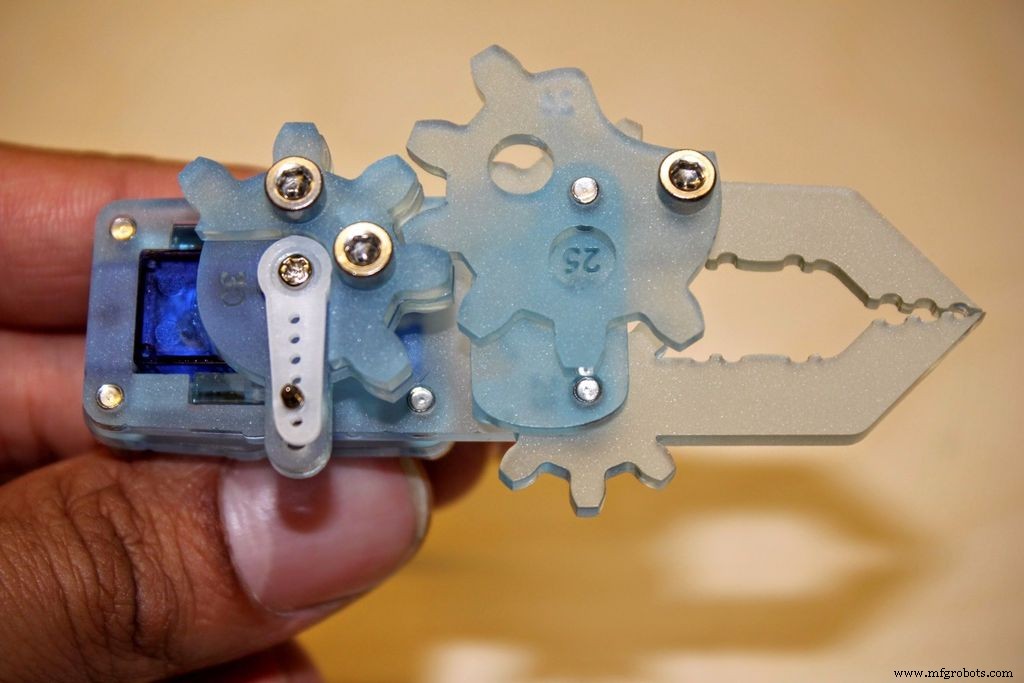
나머지 칼라 #21을 통해 서보를 끼웁니다. 부품 #22, #23을 서보에 의해 만들어진 측면 슬롯에 삽입하고 부품 #21을 사용하여 부품 #24를 사용하여 4개의 8mm 너트로 고정합니다. 다시 한 번 주의하십시오. 거의 다 왔습니다. 아무 것도 부수고 싶지 않을 것입니다.
다음 부품은 마지막 나사가 제자리에 고정될 때까지 약간 고정되지 않으므로 지금 무언가를 떨어뜨리더라도 걱정하지 마십시오. 8mm 나사를 사용하여 헤드 어셈블리의 왼쪽 구멍을 통해 부품 #28을 부품 #25에 고정합니다. 그런 다음 부품 #27에 기어를 맞물리고 12mm 나사를 통과시켜 헤드 어셈블리 및 부품 #25를 놓습니다. 이것은 아직 안전하지 않지만 함께 유지합니다.
부품 #30에 서보 혼을 부착하고 작은 나사를 사용하여 서보에 고정합니다. 2개의 6mm 나사를 사용하여 #29를 #30에 부착합니다.
이제 #26을 느슨한 12mm 나사에 부착하고 8mm 나사로 부품 #27의 추가 구멍에 고정할 수 있습니다.
12단계:머리 추가
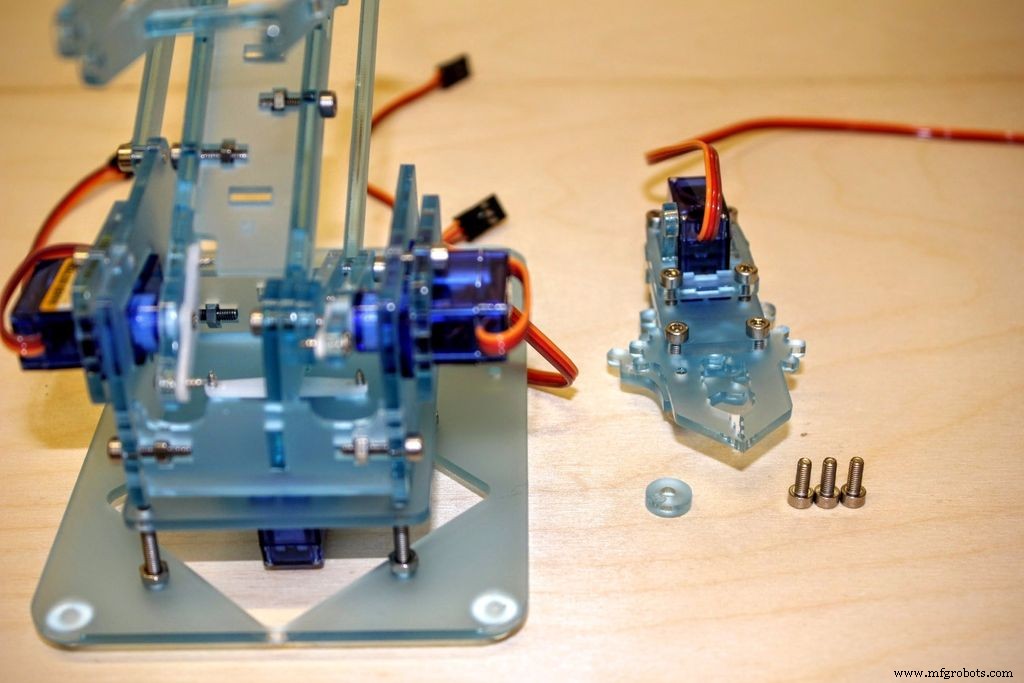
마지막 부분은 헤드를 부착하는 것입니다.
이것은 팔뚝을 통해 머리의 부품 #22 및 #23에 2개의 8mm 나사로 고정됩니다. 헤드 서보 클램에 있는 8mm 나사를 더 쉽게 풀 수 있습니다.
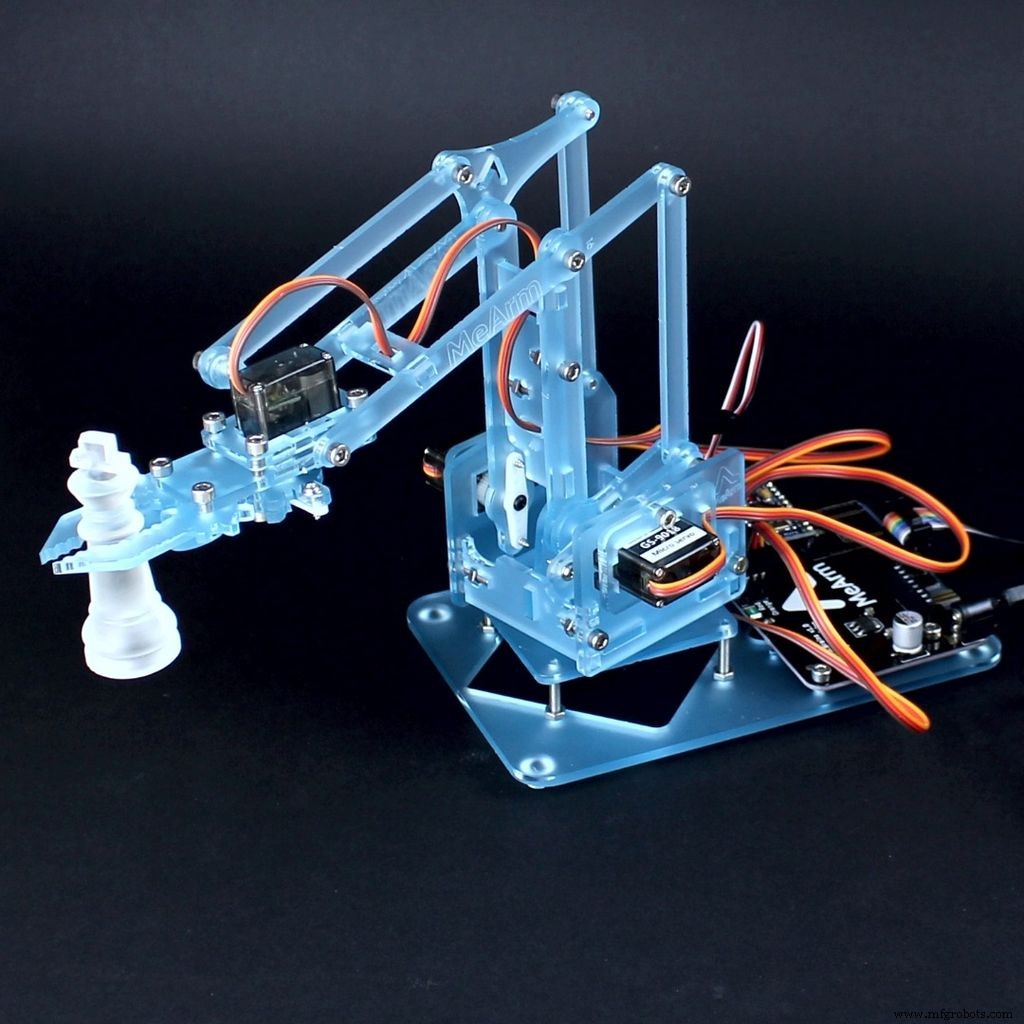
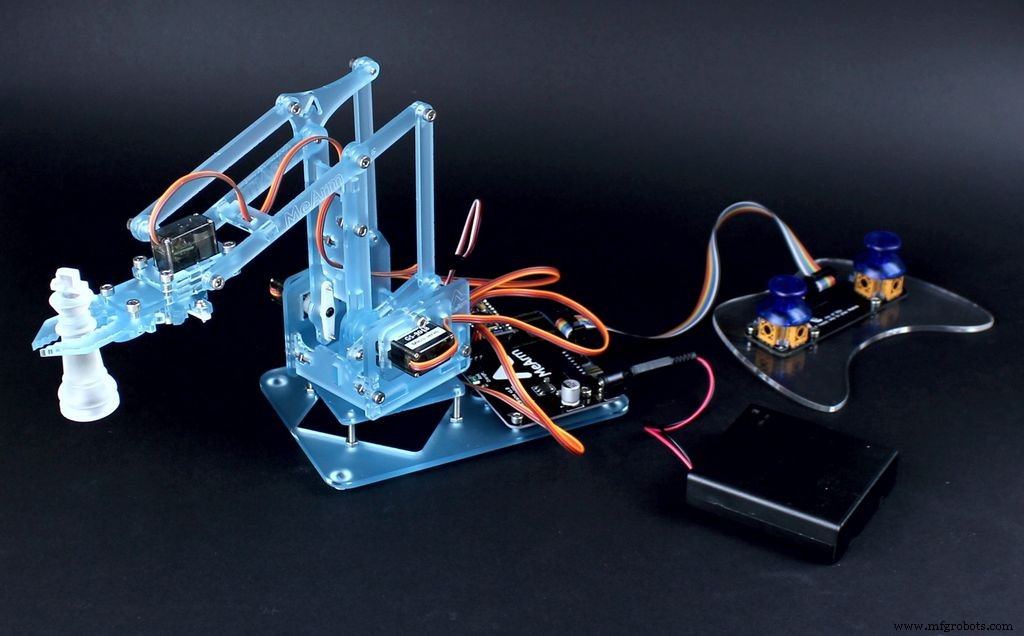
이제 전원을 켜고 플레이하세요!
13단계:문제 해결
이 섹션은 시간이 지남에 따라 일반적인 문제로 채워질 것입니다. 하나가 있으면 알려주시면 추가하겠습니다.
왼쪽 서보 암이 멈춘 것 같습니다. 일반적으로 이것은 뻣뻣한 조인트로 인해 발생합니다. 헤드 어셈블리 부착물은 사람들이 잊어버리는 것입니다.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">#include서보 중간, 왼쪽, 오른쪽, 발톱; // 4개의 "서보 객체"를 생성합니다. void setup() { Serial.begin(9600); middle.attach(11); // 핀 11의 서보를 중간 객체에 연결합니다. left.attach(10); // 핀 10의 서보를 왼쪽 객체에 연결합니다. right.attach(9); // 핀 9의 서보를 오른쪽 객체에 연결합니다. claw.attach(6); // 핀 6의 서보를 발톱 개체에 연결합니다.} void loop() { middle.write(90); // 값(도)에 따라 서보 위치를 설정합니다. left.write(90); // 동일한 작업을 수행합니다. right.write(90); // 그리고 다시 claw.write(25); // 예, 당신은 그것을 추측했습니다 delay(300); // 튀길 수 있는 서보를 지속적으로 업데이트하지 않음}
제조공정
약 10%-20%의 로봇에 이 잘 알려지지 않은 기능이 있습니다. 준비가 되지 않으면 프로그래밍이 엉망이 될 수 있습니다. 요전에 새로운 로봇 개념에 대해 배웠습니다... 로봇 축 커플링. RoboDK의 CEO인 Albert Nubiola는 저에게 다음과 같이 말했습니다. 로봇 축 커플링은 로봇 프로그래밍에 중요하지만 많은 사용자가 이를 인식하지 못하고 종종 혼란스러워합니다. 그는 옳았다! 축 커플링에 대한 글은 거의 없습니다. 게다가 저는 거의 10년 동안 로봇 공학 전문가였음에도 불구하고 이 약간 특이한 기능을 인지한
로봇의 그리스를 교환하고 유지하는 것의 중요성은 차량의 오일을 교환하는 것의 중요성과 유사합니다. 시간이 지남에 따라 오일과 그리스는 모두 분해되어 로봇/차량의 점도와 효율성을 잃습니다. 2년마다 새 로봇을 구입할 계획이 아니라면 로봇이 같은 그리스로 2년 동안 작동하도록 허용해서는 안 되는 것과 마찬가지로 동일한 오일로 자동차를 1~2년 동안 작동시키지 않을 것입니다. 500~700시간이 지나면 로봇의 그리스가 분해되기 시작하여 관절이 거칠어지고 로봇의 성능에 영향을 미칠 수 있습니다. 로봇을 매일 사용하는 경우 한 달에 한 번