

산업용 로봇

산업 제조
제조 산업에서는 다양한 프로세스를 자동화하는 로봇을 종종 볼 수 있습니다. 이러한 로봇은 회사의 프로세스를 간소화하고 부상 위험을 줄이는 데 유용합니다. 이러한 회사에서 사용하는 대부분의 로봇은 픽 앤 플레이스, 조립 및 포장에 사용되는 로봇 팔입니다. 이러한 로봇 팔과 관련하여 염두에 두어야 할 몇 가지 측면이 있습니다. 그 중 하나가 로봇 팔에 장착된 로봇 손목입니다. 대부분의 사람들은 로봇 팔의 이 매우 중요한 부분에 대해 잘 모릅니다. 이 짧은 기사에서 우리는 그것이 무엇을 의미하고 무엇을 수반하는지 더 자세히 설명할 것입니다. 출처:www. k-and-s.com
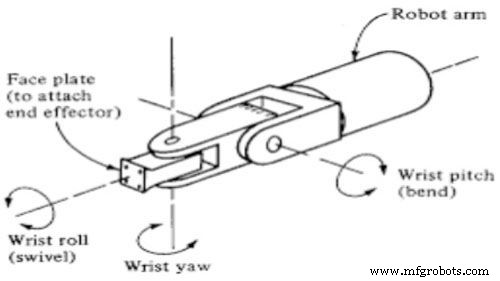
로봇 팔로 작업할 때 일반적으로 작동하는 두 가지 중요한 구성 요소가 있습니다. 여기에는 몸과 팔 자체가 포함됩니다. 팔에는 서로 다른 방향으로 움직일 수 있는 다양한 관절이 있는 로봇 손목이 있습니다. 이 움직임을 통해 로봇 손목은 끝에 부착된 엔드 이펙터를 제어할 수 있습니다. 로봇 팔이 수행하는 데 필요한 다양한 작업을 수행하는 데 도움이 됩니다. 공통의 목표를 달성하기 위해 각자의 역할을 수행하는 서로 다른 부분의 시스템입니다. 로봇 팔에 장착된 로봇 손목에는 다양한 응용 분야에서 원활하게 작동할 수 있는 최소 2~3개의 소형 조인트가 있습니다. 출처:www. brainkart.com
로봇 손목 메커니즘은 매니퓰레이터의 큰 부분이며 다양한 애플리케이션을 위해 엔드 이펙터의 방향을 지정하는 역할을 합니다. 이 메커니즘은 축을 중심으로 회전하는 팔과 다양한 방향으로 다른 움직임을 만들 수 있는 관절이 특징입니다. 사용 중 로봇 손목 메커니즘은 다양한 작업 환경에 노출됩니다. 사용하는 동안 다양한 진동에 노출됩니다. 이러한 진동은 로봇 손목과 그 기능에 부정적인 영향을 미칠 수 있습니다.
로봇 손목이 최상의 상태로 작동하도록 하는 가장 좋은 방법은 성능을 주의 깊게 연구하는 것입니다. 엔드 이펙터가 수행하는 하중에 대해 서로 다른 가중치를 적용하여 성능을 확인하십시오. 이렇게 하면 페이로드를 측정하는 데 도움이 되고 올바른 위치에서 사용하여 손상을 방지할 수 있습니다. 또한 매니퓰레이터와 로봇 손목이 올바르게 구성되어 있는지도 확인해야 합니다. 염두에 두어야 할 손목 구성은 다음과 같습니다.
이 구성을 손목 회전이라고도 합니다. 팔 축을 중심으로 손목 메커니즘이 회전하는 것이 특징입니다.
손목 메커니즘 구성의 피치는 손목 굽힘이라고도 합니다. 손목의 상하 회전이 특징입니다.
Yaw를 사용하면 손목의 움직임과 회전이 오른쪽과 왼쪽에 전용됩니다.
TRL 표기법은 수직축과 수평축 모두에서 회전할 수 있는 슬라이딩 암을 특징으로 합니다.
이를 통해 로봇 손목은 수직 기둥을 기준으로 작동합니다. 이를 통해 손목은 당면한 작업에 따라 위아래로 움직이거나 안팎으로 움직일 수 있습니다.
LOO 표기법은 손목이 다른 방향으로 움직일 수 있도록 하는 3개의 슬라이딩 조인트로 구성됩니다. 3개의 슬라이딩 조인트 중 2개가 직교합니다. 그들은 주로 직선 로봇과 X, Y, Z 로봇에서 발견됩니다. 출처:www. Researchgate.net
사용 중인 로봇 팔의 품질이 우수하고 정확하게 설계되었는지 확인하는 것이 중요합니다. 여기서 고려해야 할 가장 중요한 요소 중 하나는 작업할 손목 구성입니다. 손목이 특정 요구 사항에 따라 구성되어 있는지 확인해야 합니다. 엔드 이펙터는 손목이 움직이는 방향으로만 움직입니다. 이는 올바른 구성을 통해 엔드 이펙터가 정확하게 선택하고 배치할 수 있음을 보여줍니다.
또한 오른쪽 손목 구성은 부상 위험과 로봇 팔 손상을 줄이는 데 도움이 됩니다. 특정 작업을 위해 손목이 움직여야 하는 방향을 결정하고 필요에 맞게 수정하십시오. 로봇 손목은 로봇 팔의 필수적인 부분이므로 보다 부드럽고 원활한 자동화 프로세스를 위해 구성 요구 사항을 확인해야 합니다.
로봇 손목은 다양한 자동화 작업에 로봇 팔과 조작기를 사용할 때 중요한 측면입니다. 로봇 손목을 작동시키기 전에 고려해야 할 다양한 구성이 있습니다. 이렇게 하면 엔드 이펙터를 올바른 방향으로 이동하도록 설계된 최상의 구성으로 작업할 수 있습니다. 로봇 팔을 얻을 때 로봇 팔 제조업체가 원하는 대로 구성하도록 하는 것이 좋습니다. 이를 통해 비즈니스 프로세스에서 쉽게 사용할 수 있습니다. 
목차
로봇 손목이란 무엇입니까

로봇 손목 메커니즘
롤
피치
요
표기법 TRL
표기법 TLO
기보법 LOO
로봇 팔의 손목 구성의 중요성
결론
산업용 로봇
Motoman 라인의 많은 로봇과 마찬가지로 UP165는 생각보다 많은 부품이 포함된 복잡한 기계입니다. 각 Motoman 로봇과 마찬가지로 UP-165에는 서보 모터, 내부 배선 및 로봇이 움직이는 데 도움이 되는 기타 부품이 있습니다. 그러나 Motoman UP 165에서 로봇이 그에 따라 작업을 수행할 수 있도록 하는 것은 손목의 구성입니다. 손목 장치, 부품 번호 HW917은 손목과 손목 받침대로 구성됩니다. 부품 번호 HW9100890-1인 손목 베이스는 손목을 B축에서 로봇의 나머지 부분에 부착하는 로봇의 일부입니다.
컨트롤러와 티치 펜던트가 장착된 새로운 로봇의 가격은 일반적으로 $50,000 - $80,000 사이입니다. 인기 있는 6축 모델은 약 $60,000에 판매되지만 고객은 실제 로봇이 전체 시스템 비용의 일부에 불과하다는 점을 명심해야 합니다. 로봇이 작업을 위해 로봇을 프로그래밍하는 비용과 함께 사용하는 도구는 가격을 크게 증가시킵니다. 주변 장치를 추가한 후의 시스템 가격은 최종 비용에 $50,000 ~ $100,000를 추가할 수 있습니다. 고객은 중고 로봇의 가격이 새 로봇의 절반 정도임을 기대할 수 있습니다. 로봇을 구매