

자동화 제어 시스템

산업 제조
많은 상점이 운영을 자동화하고 싶다고 말하지만 실제로는 몇 개가 있습니까?

선형 팔레트 시스템에 대한 제조 엔지니어링 2017년 8월호의 기사는 업계 전문가가 그가 방문하는 모든 상점이 자동화를 원한다고 말한 것을 인용했습니다. 그러나 Okuma America Inc.(NC Charlotte, NC)의 제품 전문가인 Errol Burrell은 최근 모든 공작 기계의 10%만이 자동화되어 있다고 말했습니다. 그리고 Methods Machine Tools Inc.(매사추세츠주 서드베리)의 국가 자동화 관리자인 John Lucier에 따르면 Robotics Industries Association은 새로운 기계의 3-4%만이 로봇을 가지고 있다고 보고합니다.
따라서 선형 팔레트 시스템, 단순 팔레트 교환기 또는 로봇에 대해 이야기하든 미국 기계 가공 작업을 자동화할 수 있는 엄청난 기회가 있다는 것은 분명합니다. 수평형 기계는 수직형보다 더 자주 자동화되지만 수직형 머시닝 센터는 수평형보다 더 널리 사용되므로 아직까지 가장 큰 잠재력은 수직형 자동화에 있습니다. Gosiger(오하이오주 데이턴)의 자동화 부서 부사장 겸 총괄 책임자인 Greg Feix가 자신의 회사가 지난 2년 동안 수직 기계 자동화가 5~7배 증가했다고 말한 것은 당연합니다.
수직이든 수평이든 가장 간단한 자동화 형태는 회전식 팔레트 교환기입니다. 작업자는 기계가 내부에서 동일한 배열로 작동하는 동안 외부 팔레트에 장착된 고정 장치에 부품을 로드합니다. 첫 번째 부품 세트가 완료되면 팔레트가 회전하고 작업자가 완성된 부품을 내립니다.
Lucier는 이 수준의 투자가 바이스 및 기타 고정 장치에 대한 공작 기계 가치의 10%를 유지하는 일반적인 관행에 적합하지만 일반적으로 몇 가지 부품만 가공할 수 있기 때문에 수직에서 작업자를 오랫동안 자유롭게 하지 못한다고 말했습니다. 한 팔레트에. 따라서 많은 사람들이 그러한 시스템에 대해 문의하지만 구매하는 사람은 거의 없습니다.
가장 일반적인 접근 방식은 팔레트에 4, 8, 16개 또는 그 이상의 부품을 가공하기 위해 4면에서 5면으로 된 묘비를 놓는 수평 방식의 경우 경제성이 약간 다릅니다. 그러나 그렇다 하더라도 각기 다른 워크홀딩이 필요하기 때문에 다양한 부품을 가공해야 하는 경우에는 비용이 많이 드는 접근 방식입니다.
Doosan Machine Tools America(Pine Brook, NJ)의 영업 이사인 Andy McNamara는 2위치 회전식 팔레트 교환기보다 약간 더 많은 기능을 제공하는 또 다른 옵션이 보편화되고 있다고 말했습니다. 인접한 멀티팔레트 스테이션을 기계로 옮깁니다. 팔레트 스테이션에는 일반적으로 4, 6, 8개 이상의 위치에 회전 드럼이 있으며 Erowa Robot Easy가 좋은 예입니다.
"실제로 로봇은 아니지만 고급 시스템에도 작업 일정 시스템이 있을 수 있으므로 선형 팔레트 시스템의 기능에 더 가깝습니다." McNamara는 두산이 5축 기계에 대한 이러한 시스템에 대한 많은 요청을 받았으며 금형 및 다이 산업의 3축 및 4축 기계에 대해 관심을 보고 있다고 말했습니다.
"당신은 몰드 및 다이의 고급 수직에서 자동 작업 교환기 및 회전식 팔레트 시스템의 다양한 버전을 볼 수 있습니다."라고 그는 말했습니다. "작업장에서 일체형 또는 추가 팔레트 교환기를 가장 자주 봅니다."
관절 로봇을 통합하는 것은 수직 산업에 가장 적합한 솔루션인 것 같습니다. Lucier는 수직 산업이 이런 방식으로 자동화하기 훨씬 쉬운 플랫폼이라고 말하기까지 했습니다.

“Methods에서는 수평보다 수직이 자동화되는 비율이 더 높습니다. 도어를 자동화하고 로봇을 통합하는 것은 두 유형의 기계에서 동일합니다. 차이점은 관련 도구의 비용과 이점을 고려할 때 나타납니다.”
논의된 바와 같이 수평의 가장 보편적인 용도는 묘비에 부품을 가공하는 것입니다. 로봇을 사용하여 삭제 표시가 있는 팔레트를 기계에 로드할 수 있으며, 레일에 있는 로봇을 사용하여 여러 기계를 로드할 수도 있습니다. 그러나 이 접근 방식에는 상당한 로봇이 필요하며 각 묘비에 부품을 부착하는 작업자가 여전히 필요합니다.
삭제 표시에 부품을 자동으로 로드하려면 각 바이스를 유압 또는 공압용으로 배관해야 하며 다양한 부품에는 이러한 고정 장치가 필요하므로 이 접근 방식의 높은 비용을 더욱 배가해야 합니다. 많은 경우 더 나은 접근 방식은 더 작은 로봇을 사용하여 더 저렴한 수직 기계의 자동 바이스에 개별 부품을 로드하는 것이라고 주장했습니다.
Lucier는 다음과 같이 말했습니다. 로봇 자체의 가격이 100,000달러인 팔레트 시스템과 비교하면 레일, 선반, 제어 장치 등은 신경쓰지 마십시오.”
Methods의 가장 인기 있는 셀에는 기계에 두 개의 바이스가 있고(Op 10 및 Op 20) 로봇이 두 바이스를 서비스합니다. Lucier는 "대부분의 경우 두 개의 바이스를 트러니언 테이블에 놓아 단일 축에서 위아래로 회전하여 각 그리핑에서 부품의 세 면을 얻을 수 있습니다."라고 설명했습니다. “로봇은 부품을 뒤집고 회전시킨 다음 두 번째 바이스에 넣어 다른 세 면을 얻습니다. 이러한 방식으로 두 가지 작업으로 부품을 완료할 수 있으며 로봇은 뒤집기와 위치 변경을 수행합니다.”
로봇의 고유한 유연성 덕분에 여러 대의 기계에 서비스를 제공할 수도 있습니다. 예를 들어 Methods, Doosan 및 Okuma는 3개의 기계가 정사각형의 3면을 형성하고 네 번째 면이 인피드/아웃 피드 스테이션이며 로봇이 Lucier가 말한 것처럼 "중간에 원숭이" 역할을 하는 모든 필드 시스템입니다. 그것. "3대의 기계를 넘어서면 로봇 주위에 모든 것을 맞출 수 없기 때문에 레일을 확장하는 것만으로 원하는 수의 기계에 서비스를 제공할 수 있는 레일 위의 로봇으로 이동합니다."
당연히 로봇을 기다리는 기계를 원하지 않으므로 핵심 요소는 부품 주기 시간입니다. Lucier의 경험에 따르면 부품의 주기 시간이 30-40초이면 로봇 1대가 기계 1대를 서비스할 수 있습니다. 60초의 사이클 시간 동안 로봇 한 대가 두 대의 기계에 서비스를 제공할 수 있습니다. 90초라면 3대 등등. 레일 위의 로봇에도 동일한 규칙이 적용됩니다. Lucier는 사이클 타임이 6분인 5축 의료 부품의 일반적인 예를 제시했습니다. 이 경우 "철도 위의 로봇은 5~6개의 FANUC Robodrills를 매우 훌륭하게 처리합니다."
수직 공작 기계의 상대적으로 저렴한 비용을 제외하고는 변경하기 쉽습니다. Lucier가 말했듯이 “수직에서 부품 유형을 전환하려면 일반적으로 바이스 죠만 변경하면 됩니다. 인서트 교체 다음으로 수직 기계 작업자는 항상 바이스 죠를 교체하는 방법을 알고 있습니다."
더 빠르고 비용 효율적인 접근 방식은 Schunk, 3R 및 Erowa에서 제공하는 제로 포인트 클램핑 시스템을 사용하는 것입니다. 이러한 시스템을 통해 작업자는 기계 외부에서 새로운 바이스를 설정하고 위치를 다시 영점화할 필요 없이 몇 초 만에 바이스를 전환할 수 있습니다.
"수동으로 해야 하지만, 팔레트 교환기에서 팔레트를 교체하는 것만큼 빨리 바이스를 전환할 수 있습니다."라고 Lucier가 말했습니다.
수동 워크홀딩 스위치를 제거할 수 있습니다. Gosiger의 Feix는 Schunk와 ATI가 자동 엔드 오브 암(end-of-arm) 툴링 퀵 체인지 장치를 만든다고 말했습니다. Gosiger는 로봇이 부품 고정 장치를 기계에 로드한 다음 EOL(end-of-arm tooling)을 변경한 다음 가공 공정을 위해 부품을 로드하는 맞춤형 자동화를 설치했습니다.
두산의 자동화 프로젝트 매니저인 Jack Cardin도 이에 동의했습니다. "크기 변화가 그리퍼 핑거 교체에 너무 크거나 ID에서 OD로 전환하는 경우 로봇의 손목에서 전체 손을 바꾸는 것이 좋습니다."라고 그는 말했습니다. "우리는 모두 Schunk에서 선택할 수 있는 4가지가 있습니다."
Lucier는 최근 몇 년 동안 가장 크게 개선된 이 "주변" 기술 덕분에 "자동화를 보다 유연하게 만들어 선택이 더 쉬워졌습니다."라고 말했습니다.
Lucier는 완전히 새로운 작업을 위해 로봇을 설정하는 데 숙련된 작업자가 약 30분이 소요된다고 말했습니다. 반복 작업이고 로봇 프로그램을 저장했다면 설정은 약 15분이면 됩니다. 따라서 일반적인 작업이 하루 이상 실행될 것이라고 생각할 때 전환 시간은 무의미합니다.
확실히 각 부품 변경에 대해 로봇을 기계 안팎으로 움직이는 시스템의 비절삭 시간은 팔레트에 여러 부품이 있는 일반적인 팔레트 교환기 배열보다 더 깁니다. 그러나 로봇 자동화의 유연성을 통해 사용자는 최소한의 도구 비용으로 더 많은 소량 작업을 자동화할 수 있습니다.
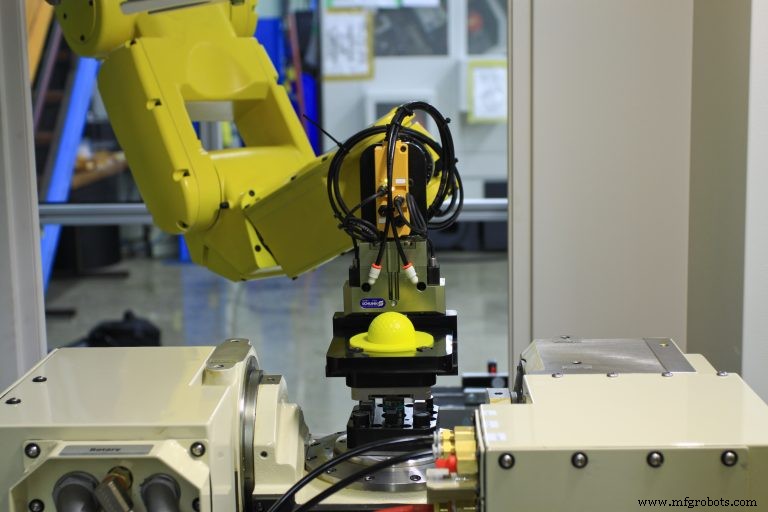
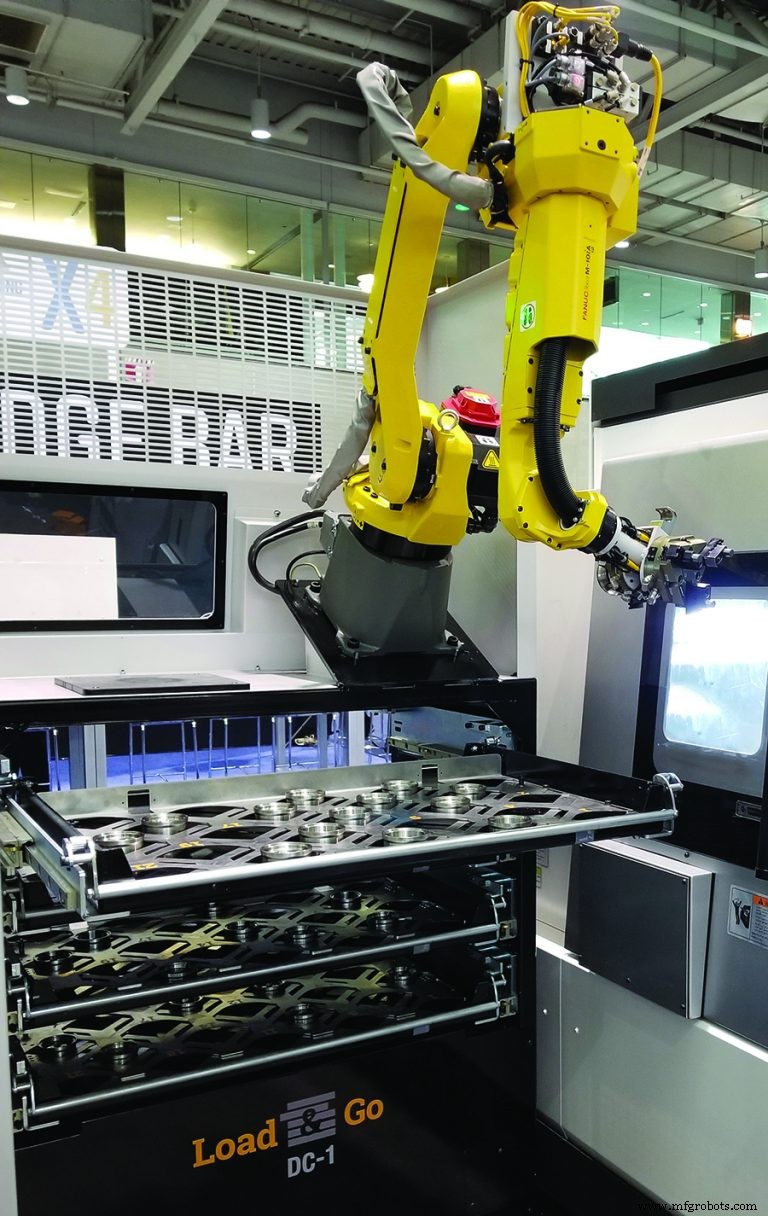
어떤 면에서 로봇 자체는 자동화를 고려할 때 시스템에서 가장 쉽게 이해할 수 있는 부분입니다. Lucier는 인피드/아웃 피드 시스템을 엔지니어링하는 데 많은 시간이 소요된다고 말했습니다. Methods는 FANUC 및 FANUC의 유명한 노란색 로봇과 독점적으로 협력합니다. Lucier가 말했듯이 “로봇은 노란색입니다. 작업에 적합한 크기를 선택하면 됩니다.” 더 어려운 문제는 부품을 컨베이어 시스템, 빈, 서랍 또는 다른 옵션에서 로봇에 제공해야 하는지 여부입니다.
Okuma의 접근 방식은 자동 고정 장치를 쉽게 통합할 수 있도록 하는 6포트 유압 및 공압 매니폴드가 있는 수직 기계를 공급하는 동시에 Morris, Gosiger 및 Hartwig와 같은 파트너에 의존하여 최종 사용자에게 자동화 솔루션을 지원하는 것입니다. Okuma는 또한 자동화 통합을 가능하게 하는 자동화된 도어, 레이저 및 프로브를 사용하여 일본에서 들어오는 모든 기계를 수정하기 위해 Charlotte에 있는 미국 본사에 신속한 배포 팀을 보유하고 있습니다.
Okuma의 Burrell은 "우리의 모든 기계는 Anybus 시스템과 함께 키트화될 수 있으므로 FANUC, Erowa 등 다양한 자동화 시스템과 통신할 수 있습니다."라고 덧붙였습니다. Anybus 제품을 사용하면 산업용 장치가 무선이든 케이블이든 모든 필드버스 또는 산업용 이더넷과 통신할 수 있습니다. Anybus 제품은 HMS Industrial Networks Inc.(시카고)에서 제조합니다.
"우리는 이러한 시스템에 대해 특정 공급업체를 고집하지 않습니다."라고 그는 말했습니다. "우리가 기계의 우위를 놓고 많은 회사와 싸우고 있는 것처럼 많은 사람들이 워크홀딩 및 로봇 공학과 관련하여 패권을 놓고 다투고 있습니다."
두산의 접근 방식은 세 가지입니다. 로컬 통합자가 현장에서 기계에 자동화를 설치하는 데 필요한 모든 로봇 인터페이스를 제공합니다. 또한 뉴저지에 있는 본사에서 맞춤형 자동화 솔루션을 설계할 것입니다. 셋째, 최종 사용자에게 DooCells라고 하는 사전 구축된 표준 시스템을 제공하며, McNamara는 이렇게 말했습니다. 
각 DooCell에는 로봇과 최대 3개의 머시닝 센터 또는 선반이 조합되어 있습니다. 인피드/아웃 피드 스테이션은 부품의 높이와 직경에 따라 3~5개의 서랍이 있는 서랍 장치입니다.
Cardini는 "서랍이 양방향으로 열리기 때문에 작업자는 한쪽에서 원료를 적재하거나 완성된 부품을 내리는 반면 로봇은 반대쪽에서 부품을 처리합니다."라고 설명했습니다.
McNamara는 "많은 고객들이 서두르고 있으며 이전에 사용했던 위험도가 낮은 솔루션을 추구하고 있으며 그것을 끝내고 싶어합니다."라고 덧붙였습니다. DooCell과 같은 단순하고 표준적인 솔루션이 이러한 접근 방식에 잘 맞습니다.]\
수직 머시닝 센터 및 선반과 같은 기계 유형을 혼합할 수 있는 기능 외에도 관절 로봇을 사용하여 개별 부품을 로드하면 세척 및 디버링과 같은 다른 작업을 자동화할 수 있는 유연성을 제공합니다.
Methods의 Lucier는 “20,000달러짜리 세탁 시스템은 잊어버리세요. “나에게 양동이와 따뜻한 물을 주면 로봇이 당신을 위해 놀라운 일을 할 수 있습니다. 부품을 세척하는 저렴한 방법입니다. 다음 단계:날려버리세요. 더 많은 고객이 다른 어떤 것보다 세탁 및 건조 주기를 프로그래밍하여 로봇 사용 방법을 배웁니다.”
Lucier는 유휴 시간을 없애는 데 너무 집중하지 말라고 경고했습니다. “기계에 짐을 싣도록 합시다. 시간적 여유가 있다면 약간의 디버링이나 세척도 나쁘지 않은데 집착할 이유는 없다. 로봇이 없다면 그곳에 작업자가 서 있어야 하며 매년 비용을 지불해야 합니다. 로봇을 한 번 구매하면 다시는 비용을 지불할 필요가 없습니다.”
Okuma의 Burrell은 "자동화 기술에 투자하는 대부분의 사람들은 18~24개월 내에 투자 수익을 기대하고 있다"고 말하면서 노동력 부족으로 인해 자동화를 채택하게 되었습니다. 하지만 로봇이 그 간극을 메울 수 있다는 것을 깨달았습니다.”
Lucier는 비용이 공작 기계 비용과 거의 같을 때 자동화를 정당화하기 쉽고 대부분의 경우 작은 자동화 셀이 1년 이내에 자체적으로 비용을 지불한다고 말했습니다.
"기본부터 시작하세요." Lucier가 말했습니다. “점심시간 반. 15분 휴식 2회. 8시간 교대로 하루에 1시간씩 근무하면 하루에 12%가 추가됩니다. 생산량을 10% 이상 늘리기 위해 공작 기계에서 무엇을 더 할 수 있습니까?”
게다가 로봇이 하루 종일 일관되게 부품을 교체하기 때문에 작업자가 있는 시간에도 생산량이 더 높을 것이라고 그는 말했습니다.
“남자가 아침에 일어나자마자 10초 만에 부품을 교체할 수 있다면 그는 오후 3시에 10초 만에 부품을 교체하지 않을 것입니다. 작업자와 함께 실제 실행 시간의 약 85%를 계산할 수 있지만 로봇은 최대 95%까지 계산할 수 있습니다. 중지해야 하는 유일한 시간은 도구를 교체할 때뿐이기 때문입니다. 여기에 교대 근무 후 몇 시간 동안 부품을 방치할 가능성이 있습니다.”
Industry 4.0 및 관련 개념이 채택된 정도는 논란의 여지가 있습니다. 그러나 자동화 판매에 도움이 됩니다. "우리는 사람들이 기계 가동 시간을 추적하는 시스템을 구현하는 것을 좋아합니다. 수직 머시닝 센터의 실제 스핀들 활용률이 평균 약 40%에 불과하다는 사실을 깨닫고 충격을 받기 때문입니다."라고 Lucier가 말했습니다. "당신에게 로봇이 얼마나 필요한지 알려주는 것은 John Lucier가 아니라 당신의 데이터입니다."
Burrell은 이제 10명 미만의 소규모 매장에서 자동화가 구현되는 것을 보고 있으며 직업 매장에서도 이를 "필수"로 간주할 것이라고 예상합니다. 그는 이러한 시스템이 지능이 증가하는 동시에 비용이 감소하고 있으므로 수직 기계 자동화의 엄청난 성장을 기대한다고 덧붙였습니다.
마지막으로 Gosiger의 Feix와 관련된 계약직 작업장의 사례 연구입니다. 이 공장은 낮에는 소량 작업에 수직 머시닝 센터를 사용하고 밤에는 대량 작업을 자동화하기를 원했습니다.
“그들은 762 × 406mm] 용량의 30 × 16인치 분쇄기를 고려하고 있었고 자동화 워크홀딩을 꺼내 매일 바이스로 교체할 수 있는 방법을 원했습니다. 40 × 20″[1016 × 508mm]의 더 큰 공장을 구입하고 테이블의 오른쪽에는 자동화 작업용 워크홀딩을, 왼쪽에는 주간 작업에 필요한 바이스를 두어 작업을 수행할 필요가 없도록 제안했습니다. 바꾸다. 수평에서는 절대 그렇게 하지 않을 것입니다.”
하지만 이제 수직선에서 쉽게 사용할 수 있는 일종의 유연한 자동화입니다.
자동화 제어 시스템
갱 유형 툴링은 스위스 유형 선반에서 빠르고 정확하며 비용 효율적인 가공을 제공합니다. 터렛형 툴링은 유연성과 간편한 툴링 설정을 제공합니다. 작업에 적합한 도구 유형은 무엇입니까? 이전에 스위스형 선반과 기존 선반의 5가지 주요 차이점에 대해 논의했습니다. 스위스식 기계는 여러 도구를 사용하여 사이클 내부의 부품에 대한 작업을 수행합니다. 절삭 공구는 툴링 메커니즘의 도움으로 변경되고 공작물과 접촉합니다. 이 기사에서는 올바른 도구 유형을 선택하는 것의 중요성에 대해 설명합니다. 사용 가능한 도구 유형과 최종 제품 품질
Precision Plus가 다른 기계 공장과 다르다는 첫 번째 단서 중 하나는 부드러운 딸깍 소리였습니다. 소리는 작업장 중앙에 있는 12개 이상의 기계 구동 스위스형 선반에서 나옵니다. 깔끔한 줄로 정렬되고 분명히 더 새로운 바 피더로 서비스되는 이 기계는 작업장의 CNC 기계를 특징짓는 소음 감쇠 인클로저 없이 덮개 없이 절단됩니다. 자세히 살펴보면 공작물에 동시에 들어가고 나오는 6개 정도의 도구가 나타납니다. 캠이 회전할 때. 여기에서 Mike Reader는 Miyano 옆에 있습니다. BNX 트윈 스핀들 CNC 선반.