

자동화 제어 시스템

산업 제조

모든 명백한 이유 때문에 자동화는 제조 분야에서 여전히 초점을 맞추고 있으며 로봇 공급업체는 계속해서 인상적인 새로운 기능을 도입하고 있습니다. 매사추세츠주 서드베리에 있는 Methods Machine Tools Inc.의 로봇 공학 자동화 관리자인 Zach Spencer가 “지금 가장 크고 흥미로운 것은 협동 로봇입니다. 코봇은 새로운 가공 옵션을 제공하고 투자 수익을 높이는 혁신적인 자동화 시스템입니다. 일부 고객은 3개월 이내에 협동로봇에 대한 비용을 지불했습니다.”
Spencer는 협동로봇이 프로그래밍할 수 있는 직관적인 방식 때문에 많은 부분에서 인기가 있다고 덧붙였습니다. “로봇이 특정 지점으로 이동하도록 프로그래밍하기 위해 티치 펜던트를 거치지 않고 수동으로 로봇을 드래그하여 티치 펜던트에 설정 포인트를 생성할 수 있습니다. 그런 다음 로봇을 다음 위치로 끌고 설정점 2를 지정합니다. 이것이 협동 로봇의 더 나은 기술 중 하나입니다.”
협동로봇 제조업체는 또한 특수 그리퍼, 비전 시스템, 용접 헤드 및 운영 소프트웨어를 포함한 타사 액세서리와의 통합을 촉진하여 자동화에 혁명을 일으켰습니다. 미시간 주 앤아버에 위치한 Universal Robots는 UR+ 프로그램에 300개 이상의 제품과 파이프라인에 수백 개 이상의 제품을 보유한 이 분야의 리더입니다. 애플리케이션 수석 관리자 Joe Campbell은 UR+를 "유니버설 로봇용 앱 스토어"라고 부릅니다. 우리는 개발자가 소프트웨어를 개발할 수 있도록 [운영 체제에 대한] 깊은 액세스 권한을 제공합니다. 그런 다음 검증 및 테스트하고 인증합니다.”

무작위로 배치되어 있더라도 쓰레기통에서 부품을 픽업하는 로봇의 기능은 새로운 것이 아닙니다. 그러나 Universal Robots와 같은 공급업체는 이러한 시스템을 구현하기 쉽게 만듭니다. Campbell은 역사적으로 이러한 상황에서 발생하는 모든 다양한 시나리오를 포괄하는 코드를 작성하는 데 몇 주를 소비해야 한다고 설명했습니다. 그러나 UR의 ActiNav 솔루션은 이미 “장기적으로 개발된 많은 양의 코드를 통합하여 픽업 위치에서 내려 놓는 위치까지 이동하는 방법을 정의하는 데 전통적으로 필요한 모든 프로그래밍을 제거합니다. ... ActiNav를 사용하여 부품을 가르치고 ... 하차 위치를 가르치고 ... 기본적으로 4점에서 접촉하는 빈을 정의하고 ... 공간의 다른 모든 장벽을 정의합니다. 그런 다음 시스템은 사용자 정의 프로그래밍 없이 식별되는 픽업 지점에서 배치 지점까지 도달하기 위해 자체 로봇 경로와 궤적을 완전히 계획합니다.”
Campbell은 ActiNav에 "부품을 가르치는 것"은 공작물의 CAD 파일을 가져온 다음 협동로봇이 그것을 잡아야 하는 표면을 지정하는 것만큼 간단하다고 덧붙였습니다. 부품이 단순할 필요는 없으며 "정확한 선택을 가능하게 하는 표면"만 있으면 됩니다. 매우 간단합니다. 나는 사람들이 시스템이 이전에 한 번도 작동하지 않은 완전히 새로운 부분을 취하여 약 2시간 만에 설정하는 것을 보았습니다.” 또한 Campbell은 무작위로 빈 선택과 관련된 전자 상거래 솔루션과 달리 ActiNav는 공작 기계를 자동 로드할 만큼 정확하다고 말했습니다.
짐작하셨겠지만, ActiNav는 픽업할 때마다 협동로봇의 방향을 지정하기 위해 3D 비전 시스템이 필요합니다. 이 경우 슬로바키아 브라티슬라바에 있는 UR+ 파트너 Photoneo의 센서입니다. 장치는 빈 위에 장착되어 거의 즉시 상세한 이미지를 생성한다고 Campbell은 말했습니다. (이 시스템은 스캔당 320만 개의 3D 포인트를 캡처합니다.) 결정 및 로드 시간도 마찬가지로 빠르며 Campbell은 약 30초의 주기 시간을 가진 작업이 제품에 가장 적합하다고 생각합니다. 작업자가 여러 대의 기계를 관리하기에는 너무 빠르지만 ActiNav의 처리 시간 내에 있습니다. 시간이 30초보다 훨씬 빠르면 ActiNav가 기계 주기를 늦춥니다. 물론, 야간 근무를 자동화하는 것과 같이 더 느린 주기를 기꺼이 받아들일 수 있는 다른 상황도 있습니다. 그렇지 않으면 비생산적입니다.
스마트 빈 피킹은 협동로봇에 국한되지 않으며, Methods Machine Tools의 Spencer는 FANUC 로봇이 빈에서 단조 알루미늄 토치 본체를 가져와 가공을 위해 FANUC RoboDrill에 로드하는 실제 예를 제공했습니다. 핵심은 빈에 있는 물체의 3D 포인트 클라우드를 생성하는 FANUC의 iRVision 시스템입니다. "그리고 그 정보는 로봇과 관련이 있으므로 정확하게 부품을 찾아낼 수 있도록 부품에 접근해야 하는 각도를 알고 있습니다."
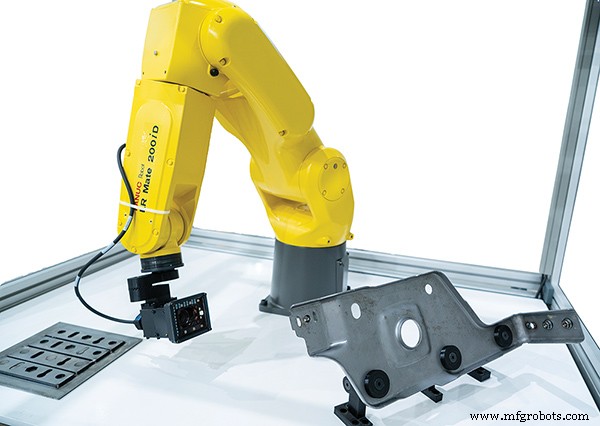
Spencer는 단조가 두 개의 다이가 만나는 지점에 파팅 라인을 생성하고 라인이 항상 같은 지점에 있는 것은 아니라고 지적했습니다. 부품의 복잡하고 윤곽이 잡힌 형상은 또 다른 과제를 제시했습니다. 그러나 ActiNav와 마찬가지로 "3D 모델을 소프트웨어에 업로드하고 이것이 우리가 찾고 있는 모양이라고 말합니다."라고 Spencer는 설명했습니다. "FANUC의 소프트웨어는 크기의 변화를 고려하며 이러한 변화에 대한 제한을 설정하는 데 탁월합니다." 이 토치 본체의 중서부 제조업체는 손으로 로딩하는 거대한 회전식 이송 기계에서 두 대의 로봇이 서비스하는 네 개의 RoboDrill로 이루어진 자동화 셀로 전환했습니다. 결과적으로 그들은 이제 "전송 기계에서보다 개선된 처리량, 더 많은 가동 시간, 훨씬 더 낮은 스크랩 비율"로 부품을 생산합니다.
Spencer와 관련된 보다 최근의 예는 목재 스키드에서 열처리 및 기계로 건설 장비용 대형 액슬을 자동 로드하는 것입니다. 차축은 길이, 직경 및 무게(약 200~500lb)가 다르며 로트 크기가 작습니다. 스펜서는 나무 스키드의 높이도 다양하다고 덧붙였습니다. Methods는 작업자가 플랜지 쪽이 아래로 향하고 수직으로 세워진 다양한 차축의 4 × 4'(1.22 × 1.22m) 팔레트를 지게차로 셀로 간단히 이동할 수 있는 시스템을 만들었습니다. 그런 다음 측면 보기용으로 설계된 FANUC 소프트웨어 및 2D 비전 카메라는 각 부품을 잡기 위해 그리퍼가 얼마나 아래로 위치해야 하는지를 결정하고, 오버헤드 카메라는 바닥에서 올바른 위치(X 및 Y)를 결정합니다. Spencer는 수직 포지셔닝이 “큰 기술 개선입니다. … 실제로 로봇으로 사진을 찍고 그 사진을 측정할 수 있다는 것은 [큰 발전입니다.]”
Campbell의 관점에서 ActiNav는 오늘날의 로봇 공학이 사용자에게 "매우 복잡한 기술을 숨기는" 방법의 한 예입니다. 비슷한 맥락에서 Fastems Oy AB(핀란드 탐페레)와 West Chester(오하이오주)의 솔루션 영업 이사인 Mika Laitinen은 카메라로 X 및 Y 좌표를 포착하는 작업이 겉보기에는 간단해 보이지만 실제로는 고급 이미징이 필요할 수 있다고 말했습니다. 알고리즘. 예를 들어, 그는 최신 스마트 카메라 릴리스가 "특정 이미징 알고리즘에 대한 신경망 계산"을 사용하는 미국 카메라 제조업체 Cognex를 지적했습니다. 그는 이러한 시스템이 광학 문자 판독과 같은 이전의 어려운 작업을 일반적이고 강력한 기능으로 전환한다고 덧붙였습니다. 이러한 시스템의 컴퓨팅 용량은 “인공 지능은 로봇 공학과 별개의 주제가 아닙니다. … 오늘날 인공 지능은 스마트 센서와 스마트 카메라 시스템에 점점 더 많이 내장되고 있습니다.”
FANUC America Corp.의 일반 산업 및 자동차 부문 엔지니어링 관리자인 David Bruce는 회사의 iRVision 시스템에 "추가 하드웨어 없이" 인공 지능(AI) 오류 방지 기능이 내장되어 있다고 말했습니다. iRVision은 2D 또는 3D 머신 비전을 기반으로 한 로봇 가이던스를 특징으로 하며 "FANUC의 고신뢰성 로봇 컨트롤러"는 로봇 동작과 "AI Error Proofing 기능을 포함한 비전 처리"를 모두 처리합니다.

Bruce는 “iRVision은 PC나 스마트 카메라를 사용하지 않기 때문에 작업 셀의 신뢰성에 부정적인 영향을 미치지 않습니다. “AI Error Proofing 도구는 좋은 부품과 나쁜 부품의 여러 예를 제공하여 생산 실행 중에 둘을 구별합니다. 설정하는 동안 작업자는 공작물의 여러 예를 제시하고 이를 양호 및 불량의 두 가지 범주로 분류할 수 있습니다. 작업자가 이미지를 분류하면 AI Error Proofing 기능이 생산 실행 중에 부품을 자동으로 분류합니다.”
Fastems의 Laitinen은 LiDAR(빛 감지 및 거리 측정) 기술이 결국 스테레오 비전 시스템(즉, 여러 대의 카메라를 사용하여 X, Y 및 Z로 측정)을 대체할 것이라고 추측했습니다. “2D 카메라는 작고 편리하며 원하는 곳에 쉽게 배치할 수 있습니다. 로봇 손목에 숨기고 모든 정보를 얻을 수 있습니다. 그러나 3D 비전을 사용하려면 장비가 훨씬 더 크고 추가 레이저 프로파일 스캐너 또는 세 번째 좌표를 측정하는 데 사용되는 모든 기술이 포함될 수 있습니다.”
반대로 LiDAR 장치는 2D 카메라와 모양이 다르지 않지만 3D 데이터를 캡처한다고 그는 말했습니다. (Laitinen은 특히 독일 Waldkirch의 SICK AG와 미네소타주 미니애폴리스의 센서를 지칭함) "LiDAR 기술을 사용하여 단 하나의 카메라로 X, Y 및 Z 좌표를 측정하는 것은 일종의 혁명이 될 것입니다."라고 Laitinen은 말했습니다. . Fastems는 아직 이러한 시스템을 구축하지 않았지만 여러 고객과 타당성 조사를 수행했습니다.
로봇을 사용하여 CMM이나 측정 스테이션을 관리하는 것은 놀라운 일도 새로운 일도 아니지만 실제로 측정을 수행하기 위해 로봇의 그리퍼를 사용하는 것은 놀라운 일입니다. Campbell은 UR+ 공급업체인 New Scale Robotics, Victor, N.Y.가 픽 앤 플레이스 기능 외에 고정밀 캘리퍼 역할을 하는 그리퍼를 개발했다고 말했습니다. 2.5 µm 이내의 정확도를 제공합니다.
Campbell은 "사용자는 부품을 잡고 부품을 잡은 상태에서 측정을 기록하거나 그리퍼를 사용하여 부품을 마이크를 잡고 여러 위치를 테스트한 후 부품을 획득하고 집어 들고 이동할 수 있습니다. 이는 제조 프로세스의 중간에 계측 프로세스를 포함시킨 좋은 예입니다.”
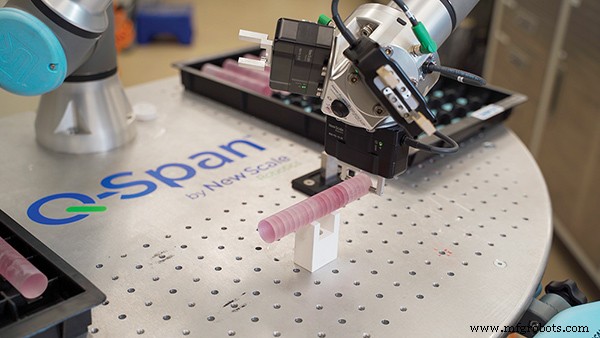
New Scale Technologies의 한 부서인 New Scale Robotics는 고정밀 그리퍼와 Universal Robots의 UR3e 협동로봇을 결합하여 Q-Span 워크스테이션을 만듭니다. 한 고객인 뉴욕 온타리오주 OptiPro Systems는 OptiSonic 연삭기에서 나오는 광학 유리 실린더의 100% 공정 중 검사에 Q-Span을 사용합니다. 검사를 통과한 부품은 최종 검증을 위해 CMM으로 이동합니다. 이렇게 하면 이전에 회사에서 수행한 수동 검사가 필요하지 않을 뿐만 아니라 Q-Span은 수동 캘리퍼스보다 4배 더 정확하여 제조 공정을 더 엄격하게 제어하고 불량품을 줄일 수 있습니다. Campbell은 New Scale 그리퍼는 인간이 수행하는 6단계를 한 주기로 수행한다고 말했습니다. 또한 OptiPro는 동일한 그리퍼 세트로 다양한 부품을 처리할 수 있습니다.
Laitinen은 로봇의 움직임과 상태에 대한 서보 데이터를 수집하는 것도 두 가지 중요한 이점을 제공한다는 것을 관찰했습니다. 첫 번째는 예측 유지 관리에 대한 추세를 연구하는 기능으로, FANUC의 ZDT(제로 다운 타임) 프로그램이 주목할만한 예입니다. 두 번째는 QC와 관련된 "애플리케이션별 프로세스 데이터를 수집하여 상위 레벨 제어 소프트웨어에 배포"입니다. 이것은 로봇이 다른 기계를 돌보는 것과는 대조적으로 공작물에 작용하는 애플리케이션에 적용됩니다.
Laitinen은 항공우주 산업이 터빈 구성요소의 마무리 및 라이닝(금속을 매끄럽게 하거나 평평하게 하는 마무리 기술)과 로봇 서보 데이터를 사용하여 프로세스를 제어하는 등의 방식으로 로봇을 사용하는 좋은 예를 제공한다고 말했습니다. 그는 “항공우주 업계 사람들은 부품을 만들고 나중에 품질을 확인하는 것보다 공정을 관리하기 위해 노력하는 것이 낫다는 것을 알고 있다”고 말했다. 이를 통해 부품이 제조되는 방식과 모든 주요 성능 변수 및 이러한 값이 제조 프로세스 중에 어떻게 변하는지 이해하게 됩니다. 제대로 하면 이 데이터를 사용하여 실시간으로 수정하거나 필요한 경우 로봇을 자동으로 오프라인으로 전환하고 불량 부품을 생산하기 전에 작업 경로를 다른 장치로 다시 지정합니다.
“이것이 항공우주 산업에서 Fastems의 성공 사례였습니다. 우리의 제어 소프트웨어는 생산을 중단하지 않고 생산 라인의 이러한 종류의 변화에 적응할 수 있습니다.” 그는 COVID-19 대유행으로 인해 회사가 상업용 항공기 이외의 고객을 찾아야 했으며 "부분이 아닌 프로세스를 측정"한다는 철학을 신규 고객에게 전달하고 있다고 덧붙였습니다.
일부 자동화 라인에서는 한 로봇이 부품을 다른 로봇에게 넘겨야 하는 경우가 많습니다. 그리고 용접에서 때로는 한 다축 로봇이 부품을 잡고 다른 로봇이 토치를 움직이는 경우가 있습니다. 두 로봇은 단일 제어 명령을 받습니다. 그러나 여러 로봇이 동일한 부품을 움직이는 경우는 상대적으로 드뭅니다. Fastems는 최근 미국에 이러한 시스템을 설치했습니다. 부품은 두께와 무게가 다양한 최대 2.4m 직경의 거대한 링입니다. Laitinen은 로봇 1대로 들어 올리려면 매우 큰 로봇은 물론이고 매우 크고 값비싼 3점 그리퍼가 필요하며 “접근성도 매우 어려웠을 것입니다.
“그래서 대신 우리는 동일한 긴 선형 트랙(공작 기계, 세척 스테이션 등의 생산 라인과 평행)에서 두 대의 로봇을 사용합니다. 로봇은 마치 양팔 로봇처럼 움직인다”고 말했다. "이것은 단일 로봇 컨트롤러에 의해 제어되며 두 로봇은 하나의 프로그램에서 지시됩니다." 모든 픽 앤 플레이스 작업은 양쪽 끝에서 부품을 잡고 동시에 들어 올리고 움직이는 간단한 두 손가락 그리퍼로 수행됩니다.
자동화 제어 시스템
40년 이상 동안 누군가가 로봇을 생각할 때 그들은 공상과학 영화에 나오는 무언가를 생각했거나 공장에서 일해 온 로봇 팔을 생각했습니다. 이 산업용 로봇은 수십 년 동안 용접, 재료 취급 및 재료 제거에 사용되었지만 이제 새로운 로봇이 등장하고 있습니다. 새로운 로봇 시스템은 이러한 공장 사촌들로부터 기술을 파생하지만 공장 설정을 위해 만들어지는 것은 아닙니다. 새로운 로봇의 가장 큰 트렌드 중 하나는 서비스 로봇입니다. 이 로봇은 서비스 산업에서 작업을 수행하도록 프로그래밍되고 있습니다. 영화관의 키오스크, 식료품점의 셀프 계산
Swanton 용접에서는 맞춤형 금속 제조와 관련하여 귀하의 정확한 사양을 충족하는 것을 자랑스럽게 생각합니다. 우리는 매우 경험이 풍부한 제작자와 최고급 장비를 결합합니다. 이것은 우리가 어떤 일을 하든 자랑스럽게 최선을 다하는 여러 가지 방법 중 하나일 뿐입니다. 당사의 금속 압연 및 성형 서비스는 최근 금속 압연 및 성형에 관한 업계 표준인 Davi MC4P11을 구입하여 극적으로 개선되었습니다. 람보르기니, 마세라티, 두카티스, 페라리를 생산하는 동일한 지역에서 만든 이탈리아산입니다. 솔직히 Davi에서 생산한 장비는 동일