

산업용 로봇

산업 제조
로봇 회전에 대해 머리를 숙이는 것이 어렵습니다. 그렇죠? 오일러 각은 목에 통증이 있습니다. 고통을 없애기 위한 필수 입문서입니다.
방향! 그들은 단지 내 머리카락을 뽑고 싶게 만듭니다. 좌표와 회전을 사용하여 로봇의 끝 포즈를 프로그래밍한 적이 있다면 무슨 말인지 알 수 있을 것입니다.
언뜻 보기에 로봇의 엔드 이펙터 포즈를 설정하는 것이 간단해 보이죠?
로봇의 도구를 여기으로 옮기고 싶습니다. 위치를 지정하고 이것을 가리키도록 하고 싶습니다. 방향.”
직관적으로 도구의 방향을 정확히 알 수 있습니다. 그러나 정확한 숫자를 사용하여 방향을 설명할 때 갑자기 이 간단한 작업이 혼란스러워집니다.
로봇 도구의 X, Y, Z(변환) 좌표를 쉽게 설명할 수 있습니다.
번역을 설명하려면 좌표를 입력하기만 하면 됩니다. Point[X, Y, Z] =[100, 1000, 1500] mm — 동일한 기준 참조를 사용한다고 가정할 때 이것이 참조할 수 있는 위치는 하나뿐입니다. X축을 따라 100mm, Y축을 따라 1미터, Z축을 따라 1.5미터만 의미할 수 있습니다.
하지만 도구의 방향을 어떻게 설명합니까?
다음과 같이 말할 수 있습니다.
Rotation[XYZ] =[5, 45, 15]°
그러나 똑같이 말할 수 있습니다(반올림)
회전[XY'Z”] =[-7.9, 44.7, 16.2]°
또는
회전[ZY'Z”] =[7.9, 45.2, 5.0]°
또는 짝수
쿼터니언[q1-q4] =[0.9, -0.1, 0.4, 0.1]
이 모든 것은 정확히 같은 방향을 나타냅니다!
더 놀라운 것은 로봇 제조업체마다 다른 규칙을 사용한다는 것입니다. 3D 기하학에 익숙하더라도 이 모든 것이 약간의 골칫거리가 될 수 있습니다.
진짜 문제는 우리가 자연스럽게 회전에 대해 생각하지 않는다는 것입니다.
번역 좌표는 일상 생활에서 사용하기 때문에 직관적으로 이해합니다(예:"왼쪽에서 4권, 두 번째 선반에 있습니다." ). 그러나 방향을 설명해야 할 때 우리는 손가락으로 가리키며 "그 방향에 있습니다."라고 말합니다.
유감스럽게도 로봇은 모호한 "저쪽에 있다"보다 더 정확한 정보가 필요합니다.
우리에게 필요한 것은 오일러 각에 대한 확실한 이해입니다.
한 걸음 뒤로 물러나 기본부터 시작하겠습니다.
로봇 방향을 설명하는 가장 일반적인 방법은 오일러 각도입니다. 오일러 각은 각각 한 축을 중심으로 한 회전을 나타내는 세 개의 숫자로 구성됩니다. 회전 순서에 따라 다른 오일러 각도 규칙이 있습니다.
먼저 이것을 1축 예제로 단순화하겠습니다.
나침반을 상상해 보세요.
종종 세계의 Z축은 하늘에서 땅까지 뻗어 있는 축을 나타냅니다. 따라서 나침반의 바늘은 Z축(Rot[Z])을 중심으로 회전하는 것으로 생각할 수 있습니다. 나침반을 평평하게 잡고 화살표가 135°를 가리키면 북쪽이 왼쪽 어깨 너머에 있으므로 현재 남동쪽을 향하고 있음을 의미합니다. 나침반의 위치(바닥 위, 머리 위 등)가 동일한 방향이라면 각도는 항상 135°입니다.
지금까지는 매우 간단했습니다.
나침반에는 하나의 회전 값(예:Rot[Z])만 있지만 3D 방향을 설명하려면 세 개의 값이 필요합니다. 여기에서 조금 더 복잡해지기 시작합니다.
로봇 방향을 설명하는 다른 방법은 쿼터니언 또는 포즈(4×4 행렬)입니다.
이제부터는 양방향 시각 자료를 사용하는 것이 도움이 될 것입니다.
이 링크에서 RoboDK의 무료 사본을 다운로드하는 것이 좋습니다. 그러면 참조 프레임을 시각화하고 결과 좌표를 매우 쉽게 볼 수 있습니다.
RoboDK를 실행하고 "참조 프레임 추가" 버튼을 사용하거나 프로그램 메뉴에서 옵션을 선택하여 참조 프레임을 생성합니다. 화면 중앙에 빨간색, 녹색 및 파란색 프레임이 표시되어야 합니다.
다음과 같이 프레임을 회전할 수 있습니다. Alt 키를 누른 상태에서 나타나는 곡선 화살표 중 하나를 클릭하고 드래그합니다.
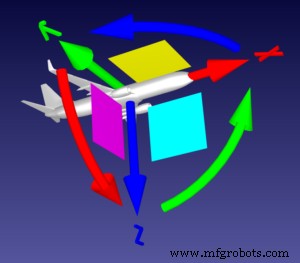
robot-forum에 매우 명확하게 설명된 것처럼 비행기의 비유를 사용합시다.
기준 좌표계가 평면이라고 상상해 보세요. 직선의 빨간색 화살표(X축)의 끝은 노즈콘의 끝이고 직선의 녹색 화살표(Y축)는 왼쪽 날개입니다.
이 경우 곡선 화살표를 이동하면 다음과 같은 기능을 합니다.
조종사가 비행기가 왼쪽과 아래로 회전하기를 원했다면 점차적으로 비행기는 Z축에서 회전하지 않을 것입니다. 비행기가 작동하는 방식이 아닙니다.
대신 비행기는:
이 전체 움직임은 Rot[XYZ]로 표시됩니다. 이러한 개념에 익숙해질 때까지 RoboDK에서 프레임을 약간 움직여 보십시오.
그런 다음 기본 창의 왼쪽 상단에 있는 프레임 이름을 두 번 클릭하여 "프레임 세부 정보" 패널을 불러옵니다.
RoboDK를 사용하여 다음 작업을 시도하십시오.
각 작업 전에 프레임 세부정보 패널에서 "햄버거" 메뉴 아이콘(가로선 3개)을 열고 "재설정(식별 설정)"을 선택하여 프레임을 재설정합니다.
보다시피 동일한 방향을 달성하는 방법은 여러 가지가 있습니다.
Y축에 대한 회전만 포함하므로 Rot[Y]라고 부를 수 있는 첫 번째 방법입니다. 두 번째 방법은 Z축을 중심으로 한 회전과 새로운 X축을 중심으로 한 회전이 포함되므로 Rot[Z, X']라고 부를 수 있습니다. 세 번째는 Rot[X, Z']라고 부를 것입니다. 프라임 기호는 고정 축 대신 마지막 이동을 기준으로 회전이 발생함을 의미합니다.

이것이 오일러 각의 기본 개념입니다. 축 및 회전 순서를 변경하여 여러 가지 방법으로 프레임을 동일한 방향으로 회전할 수 있습니다.
로봇 제조업체마다 다양한 회전 조합을 선택했습니다. 예를 들어, Stäubli는 XY'Z" 규약을 사용하고 Adept는 ZY'Z" 규약을 사용하고 KUKA는 ZY'X" 규약을 사용하며 Fanuc &Motoman은 XYZ 규약을 사용합니다. 반면 ABB는 Quaternion을 사용하고 Universal Robots는 방향 벡터를 사용합니다. 그러나 모든 규칙을 사용하여 공간의 모든 방향을 나타낼 수 있습니다.

RoboDK 문서에서 자세한 정보를 찾을 수 있습니다.
이것이 이해되기 시작하기를 바랍니다. 그러나 이것은 시작일 뿐입니다. RoboDK의 오일러 각도 규칙을 완전히 마스터하려면 이 가이드에 따라 소프트웨어를 사용하는 것이 유용합니다.
"프레임 세부정보" 패널의 연한 파란색, 보라색 및 노란색 상자에서 회전 효과를 숫자로 확인할 수 있습니다.
기본적으로 새 참조 프레임에는 일반 XYZ 규칙이 선택됩니다. 색상 상자 위의 드롭다운 메뉴에서 다른 로봇 제조업체를 선택하십시오. 상자에 숫자 값을 입력하여 참조 프레임에 미치는 영향을 확인하십시오.
오일러 각도에 대한 심도 있는 자습서를 보려면 Mecademic에서 이 페이지를 추천할 수도 있습니다.
산업용 로봇
생산 라인이 중장비 자재 취급 작업의 처리량을 늘릴 준비가 되었으면 Fanuc M-900iB 시리즈의 로봇 통합을 고려하십시오. 이 시리즈의 6축 전기 서보 구동 로봇은 높은 속도와 큰 가반하중을 제공하도록 세심하게 제작되었습니다. Fanuc M-900iB 산업용 로봇 시리즈는 사용 가능한 다양한 모델로 다양한 자재 취급 애플리케이션을 자동화할 수 있는 기능을 사용자에게 제공합니다. Fanuc M-900iB/280은 J3 암의 강성이 향상된 견고하고 정밀한 로봇으로 최고의 정밀도를 제공합니다. 이 모델은 라우팅, 절단, 디버링 및
6축의 효율적인 성능과 강도를 갖춘 Fanuc M-710iC 로봇 시리즈는 생산 라인에 통합하는 것을 고려하고 싶은 로봇입니다. 귀하의 요구 사항이 무엇이든 M-710iC 시리즈의 로봇이 충족될 것이라고 확신할 수 있습니다. Severe Dust and Liquid Protection(옵션) 옵션을 사용하면 가장 가혹한 환경에서 이러한 로봇을 사용할 수 있으므로 작업이 남지 않습니다. 여기에서 M-710iC 시리즈의 다양한 모델을 볼 수 있습니다. Fanuc M-710iC/12L은 대형 부품을 용접하도록 설계된 이 다용도 로봇(3