

산업용 로봇

산업 제조
약 10%-20%의 로봇에 이 잘 알려지지 않은 기능이 있습니다. 준비가 되지 않으면 프로그래밍이 엉망이 될 수 있습니다.
요전에 새로운 로봇 개념에 대해 배웠습니다... 로봇 축 커플링.
RoboDK의 CEO인 Albert Nubiola는 저에게 다음과 같이 말했습니다. "로봇 축 커플링은 로봇 프로그래밍에 중요하지만 많은 사용자가 이를 인식하지 못하고 종종 혼란스러워합니다."
그는 옳았다! 축 커플링에 대한 글은 거의 없습니다. 게다가 저는 거의 10년 동안 로봇 공학 전문가였음에도 불구하고 이 약간 특이한 기능을 인지한 적이 없었습니다.
로봇 축 커플링에 대해 들어본 적이 없더라도 걱정하지 마십시오. 당신은 혼자가 아닙니다.
축 커플링은 나쁜 기능이 아닙니다. 사실, 그것은 몇 가지 이점이 있습니다. 그러나 준비하지 않으면 프로그래밍에 영향을 줄 수 있습니다. Albert는 산업용 로봇의 10-20%가 축 커플링의 영향을 받는 것으로 추정합니다.
축 커플링은 두 개 이상의 로봇 관절이 함께 연결된 경우입니다. 병렬 연결로 물리적으로 연결되거나 제어 소프트웨어에서 연결될 수 있습니다.
다음은 실제 축 커플링에 대한 설명입니다...
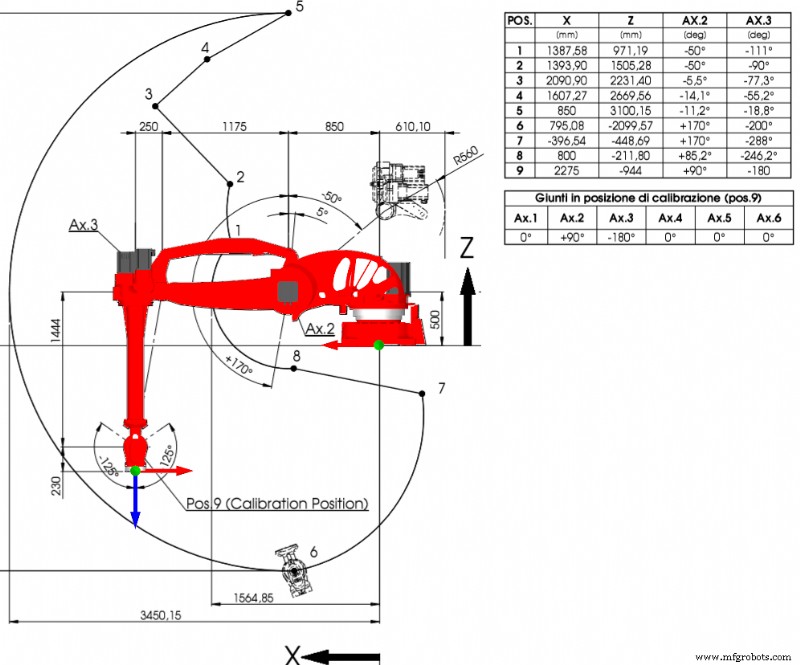
먼저 Comau Smart NJ 16-3.1과 같은 고전적인 6자유도(DoF) 산업용 로봇을 살펴보겠습니다.
대부분의 최신 6 DoF 로봇의 경우 다음이 적용됩니다.
대부분의 6 DoF 로봇에는 축 커플링이 없습니다. 이렇게 하면 제어가 매우 간단해집니다. 관절(예:관절 3)을 일정량 이동하면 해당 관절만 이동합니다.
축 커플링이 있는 로봇을 살펴보겠습니다. Comau Smart5 NJ-165-3.0
Comau는 축 커플링이 있는 여러 로봇을 생산합니다. 축 커플링이 있는 6 DoF 로봇 모델 중 하나입니다. Comau의 모든 팔레타이징 로봇에도 이 기능이 있습니다.
다음은 이 로봇에 해당됩니다.
이는 이러한 로봇의 제어 및 프로그래밍에 약간의 영향을 미칩니다. 일반적으로 6개 관절의 원하는 위치에 각각 해당하는 6개의 값을 전송하여 6 DoF 로봇을 프로그래밍합니다. 축 커플링을 사용하면 로봇의 두 관절이 종속되기 때문에 이것이 더 어려워집니다.
축 커플링이 그렇게 문제가 많다면 왜 그것을 사용합니까?
일부 상황에서 기존의 6 DoF 로봇보다 축 결합 로봇을 사용하면 한 가지 큰 이점이 있습니다. 바로 높은 페이로드입니다.
Comau NJ-165(축 결합) 및 NJ-16(기존 6 DoF)을 예로 들어 보겠습니다.
| 스마트 NJ-1-3.1 | 스마트 5 NJ-165-3.0 | |
| 유형 | 기존 6 DoF | 축 결합 6 DoF |
| 도달 | 3.11m | 3.00m |
| 반복성 | 0.1mm | 0.1mm |
| 페이로드 | 16kg | 165kg |
| 무게 | 680kg | 1240kg |
보시다시피, 이 두 로봇은 도달 범위와 반복성이 매우 유사합니다. 그러나 페이로드에 관해서는 매우 다릅니다.
축 커플링이 있는 로봇은 기존 6 DoF 로봇의 가반하중 용량이 10배 이상입니다!
이것은 많은 의미가 있습니다. 로봇의 페이로드 용량의 대부분은 관절 2와 3의 모터에서 나옵니다. 일반적으로 관절 2의 모터도 강력한 관절 3 모터의 무거운 무게를 지탱해야 합니다. 이 모터를 로봇의 베이스에 추가함으로써 Comau는 조인트 2에서 과도하게 강력한 모터를 사용하지 않고도 구조물을 더 크고 강하게 만들 수 있습니다.
축 커플링을 사용하는 로봇에는 세 가지 주요 유형이 있습니다.
로봇이 축 커플링을 사용하는지 확인하는 것이 항상 쉬운 것은 아닙니다... RoboDK를 사용하지 않는 한.
우리가 아는 한 RoboDK는 축 커플링을 정확하게 설명할 수 있는 브랜드에 구애받지 않는 유일한 소프트웨어입니다.
두 가지 방법으로 RoboDK에서 로봇에 축 커플링이 있는지 확인할 수 있습니다.
일부 로봇의 경우 로봇의 베이스에서 조인트 3까지 병렬 연결되는 것을 볼 수 있기 때문에 로봇에 축 커플링이 있음을 쉽게 알 수 있습니다. 또한 조인트 3에는 모터가 부착되어 있지 않고 베이스.
일부 로봇에는 관절 5와 6 사이에 기어박스 커플링이 있습니다.
로봇을 사용한 경험에서 다음은 3가지 로봇 브랜드에 대한 몇 가지 지침입니다.
따라서 RoboDK에서 로봇 모델을 열고 축 커플링이 있는지 확인하십시오.
그렇다면 RoboDK가 모든 것을 처리하고 축 커플링이 프로그래밍을 엉망으로 만들지 않는다는 점을 알아두십시오!
산업용 로봇
로봇의 그리스를 교환하고 유지하는 것의 중요성은 차량의 오일을 교환하는 것의 중요성과 유사합니다. 시간이 지남에 따라 오일과 그리스는 모두 분해되어 로봇/차량의 점도와 효율성을 잃습니다. 2년마다 새 로봇을 구입할 계획이 아니라면 로봇이 같은 그리스로 2년 동안 작동하도록 허용해서는 안 되는 것과 마찬가지로 동일한 오일로 자동차를 1~2년 동안 작동시키지 않을 것입니다. 500~700시간이 지나면 로봇의 그리스가 분해되기 시작하여 관절이 거칠어지고 로봇의 성능에 영향을 미칠 수 있습니다. 로봇을 매일 사용하는 경우 한 달에 한 번
로봇 자동화는 매년 꾸준히 성장하고 있습니다. 경쟁사를 따라잡고자 하는 기업은 자동화로 전환해야 합니다. 그러나 회사가 로봇을 생산 라인에 통합할 준비가 되었는지 어떻게 알 수 있습니까? 회사가 로봇 지원 여부를 확인하기 위해 몇 가지 질문을 해야 합니다. 첫째, 기업은 프로세스를 전반적으로 살펴보고 PWC.com에 따르면 반복적이거나 위험하거나 지루한 프로세스가 있는지 확인해야 합니다. 그런 다음 이러한 프로세스를 인간 대신 로봇이 수행할 수 있는지 알아내야 합니다. 인간이 오류 없이 유지하기 어려울 수 있는 높은 수준의 손재주