

나노물질

산업 제조
물체를 끌어당기는 능력이 있는 트랙터 빔은 특수 광학 빔의 한 종류입니다. 현재 사람들은 홀로그래픽 기술을 사용하여 기초 연구와 실제 적용을 위해 복잡한 광학 트랙터 빔을 형성하고 있습니다. 그러나 보고된 대부분의 작업은 2차원(2D) 트랙터 빔과 단순 3차원(3D) 트랙터 빔을 생성하는 데 중점을 두고 있어 빔 성형의 메커니즘 및 적용에 대한 추가 개발에 한계가 있습니다. 현재 작업에서 우리는 독립적으로 조절되는 공간적 위치를 가진 다중 3D 트랙터 빔을 설계하는 연구를 소개하고 있습니다. 한편, 각 개별 빔은 임의의 기하학적 곡선을 따라 규정되고 원하는 대로 임의의 각도로 비틀릴 수 있습니다. 우리의 방법에서는 각 곡선의 컴퓨터 생성 홀로그램(CGH)이 계산되고 모든 CGH가 다중화되고 각각의 선형 위상 격자를 추가하여 하나의 위상 전용 홀로그램으로 인코딩됩니다. 초점 영역. 우리는 3D 구성에서 광학 트랙터 빔의 생성이 쉽게 달성될 수 있음을 실험적으로 증명합니다. 본 연구에서 생성된 빔은 다중 미세 가공 광학 트래핑 및 복잡한 3D 조작과 같은 응용 분야에 특히 유용합니다.
오래 전에 사람들은 빛이 힘을 발휘하는 능력을 보여주었습니다. 광학 빔으로 물체를 끌어당긴다는 아이디어는 오랫동안 우리의 관심을 끌었습니다. 위상 특이성과 고유한 궤도 각운동량으로 인해 광학 소용돌이는 광학 미세 조작, 양자 통신, 광학 이미징 및 광학 측정 분야에서 중요한 연구 가치를 가지고 있습니다[1,2,3,4,5,6]. 광학 와류를 생성하는 기술이 개발되어 다양한 응용 분야에서 유용할 수 있지만 단일 광학 와류의 효율성은 여전히 낮습니다. 여러 입자를 동시에 포착하고 서로 다른 입자를 개별적으로 작동시키기 위해 광학 와류 어레이의 생성이 화두가 되었습니다[7, 8].
최근의 이론적 연구[9,10,11,12,13]에 따르면 트랙터 빔은 조명된 재료를 길이를 따라 소스로 다시 전달할 수 있는 진행파입니다. 레이저 빔 제어의 새로운 발전으로 트랙터 빔이 실험적으로 실현되었습니다[14, 15]. 3D 와류 트랩의 중요한 유형 중 하나는 광축 주위에 고정된 나선 모양을 나타내는 소위 솔레노이드 빔[16]이며, 여기서 위상 기울기는 트랙터 빔을 얻기 위해 이 곡선을 따라 규정될 수 있습니다. 이것은 Bessel 빔의 동일선상 중첩에 나선형 위상을 부과함으로써 달성되었습니다. Ruffner와 Grier[17]는 축 파 수가 다른 두 개의 동축 Bessel Beam의 간섭에 의해 얻은 트랙터 보 클래스의 특성을 실험적으로 시연하고 분석했습니다. 2013년 Rodrigo et al. 설계된 위상 전용 홀로그램을 공간 광 변조기(SLM)에 로드하고 SLM에 레이저를 조사하여 트랙터 빔을 효율적으로 생성하는 방법을 제시합니다. 그들은 이 기술을 사용하여 CGH(Computer-Generated Hologram)를 기반으로 위상과 강도가 규정된 HIG(High-Intensity Gradient) 빔을 생성할 수 있었습니다. 그들은 독특한 3D 기하학의 빔이 형성될 수 있음을 실험적으로 증명했습니다. HIG 및 위상 구배력은 광 복사 압력에 대해서도 여러 입자를 이동할 수 있는 3D 레이저 트랩의 구성에 중요합니다[19]. Rodrigo는 또한 HIG 및 위상 구배력을 포함한 자유형 레이저 트랩이 여러 입자를 가두어 움직임을 구동할 수 있음을 보여주었습니다[20]. 그러나 보고된 대부분의 작업은 단순한 3D 트랙터 빔 생성에 중점을 두고 있으며 이는 빔 성형 응용 프로그램의 추가 개발에 제한이 있습니다. 위의 분석을 바탕으로 다중 3D 트랙터 빔 생성을 위한 첨단 빔 성형 기술이 시급합니다.
이 논문에서는 모든 CGH가 다중화되고 각각의 선형 위상 격자를 추가하여 하나의 위상 전용 홀로그램으로 인코딩되는 수정된 홀로그램 빔 성형 기술을 사용하여 여러 3D 트랙터 빔을 생성하는 방법을 보여줍니다. 우리는 서로 다른 각도로 꼬인 여러 3D 트랙터 빔을 설계합니다. 이러한>새로운 트랙터 빔은 광학 와류의 응용 분야를 확장할 것으로 예상되며 잠재적으로 고성능 다중 광학 응용의 실현에 유용합니다.
그림 1a는 강도와 위상 분포가 규정된 3D 곡선을 따르는 복잡한 빔을 설계할 수 있도록 하는 [18]의 홀로그램 3D 빔 성형 기법의 체계를 보여줍니다. 복잡한 진폭 필드를 위상 홀로그램 격자로 인코딩하는 것은 CGH를 계산하는 방법입니다. 특히, 원하는 초점 빔을 생성하기 위해 입사 평면의 복소 진폭은 다음 식으로 제공됩니다.
$$ G\left(x,y\right)={\int}_0^{2\pi}\varphi\left(x,y,t\right)\phi\left(x,y,t\right) \sqrt{{\left[{x_0}^{\hbox{'}}(t)\right]}^2+{\left[{y_0}^{\hbox{'}}(t)\right]} ^2} dt $$ (1) <그림><소스 유형="이미지/webp" srcset="//media.springerature.com/lw685/springer-static/image/art%3A10.1186%2Fs11671-019- 2895-0/MediaObjects/11671_2019_2895_Fig1_HTML.png?as=webp">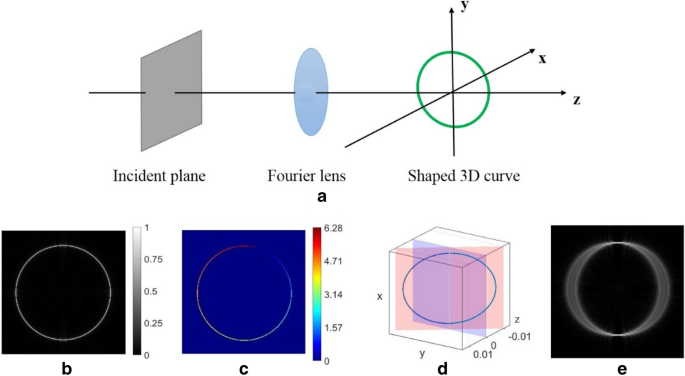
아 홀로그램 3D 빔 성형 기법의 계획. ㄴ , ㄷ 초점 평면에서 2D 링 곡선의 재구성된 강도 및 위상 분포. d 평면 z에 대해 기울어진 링 곡선의 공간 도식 =0. e 초점면에 초점을 맞춘 링 트랙터 빔(z =0)
용어 ψ (x , y , 그 ) 및 φ (x , y , 그 ) 식에서 (1)
에 의해 결정됩니다. $$ \varphi \left(x,y,t\right)=\exp \left( i\pi {z}_0(t)\raisebox{1ex}{${\left[x-{x}_0(t) )\right]}^2+{\left[y-{y}_0(t)\right]}^2$}\!\left/ \!\raisebox{-1ex}{$\lambda {f_0}^ 2$}\right.\right) $$ (2) $$ \phi \left(x,y,t\right)=\exp \left(\frac{i}{\omega_0^2}\left[{ yx}_0(t)-{xy}_0(t)\right]+\frac{i\sigma}{\omega_0^2}{\int}_0^t\left[{x}_0\left(\tau \right){y}_0^{\hbox{'}}\left(\tau \right)-{y}_0\left(\tau \right){x}_0^{\hbox{'}}\left (\tau \right)\right] d\tau \right) $$ (3)[x 0 (그 ), y 0 (그 ), z 0 (그 )]는 t가 있는 데카르트 좌표의 규정된 3D 곡선을 나타냅니다. ∈[0,2π ]. f 0 및 λ 푸리에 렌즈의 초점 거리와 파장을 각각 참조하십시오.
식 (1) 특수 강도 분포 및 위상 구배(곡선을 따라 나선 위상)로 구조적으로 안정적인 초점 빔을 형성할 수 있는 입사 복합 필드(즉, 복합 CGH)를 계산할 수 있습니다. 먼저 2D 링 커브 x를 고려합니다. 0 (그 ) =Rcos(t ), y 0 (그 ) =Rsin(t ). 결과 빔의 강도 분포는 그림 1b에 표시됩니다. 링의 위상 분포는 m =1의 위상 전하 하에서 곡선을 따라 잘 정의됩니다[그림 1c 참조]. 우리는 그림 1d에서 기울어진 링을 고려합니다. 평면 z를 기준으로 일정한 각도로 기울어진 링 곡선의 평면 =0. 이 경우 빔의 초점이 위쪽과 아래쪽 지점에 표시됩니다[그림 1e 참조].
초점 영역에서 부분적으로 분리된 다양한 트랙터 곡선 빔을 다중화하기 위해 각 복소 CGH는 Eq. (1) 고유한 반송파 주파수로 인코딩되어야 합니다. 이것은 각 빔의 홀로그램에 선형 위상 격자를 추가하여 달성할 수 있습니다. 공간 필터와 결합된 선형 격자는 일반적으로 원하지 않는 0 이상의 회절 차수로부터 첫 번째 회절 차수를 분리하는 데 사용됩니다. 선형 위상 격자의 전달 함수는 다음과 같이 주어집니다.
$$ {\varphi}_i\left(x,y\right)={kz}_i\sqrt{1-\raisebox{1ex}{${x}^2$}\!\left/ \!\raisebox{ -1ex}{${f_0}^2$}\right.-\raisebox{1ex}{${y}^2$}\!\left/ \!\raisebox{-1ex}{${f_0}^2 $}\right.}+k\left(\raisebox{1ex}{${xu}_i$}\!\left/ \!\raisebox{-1ex}{${f}_0$}\right.+\ 레이즈박스{1ex}{${yv}_i$}\!\left/ \!\raisebox{-1ex}{${f}_0$}\right.\right) $$ (4)유 나 및 v 나 초점 거리 f의 푸리에 렌즈로 얻은 원거리 필드에서 생성된 빔의 공간 좌표입니다. 0 . ㅋ =2π /λ 는 파수이며 z 나 초점 평면(푸리에 평면)에서 축으로 이동된 변위입니다. 트랙터 커브 빔을 동시에 생성하려면 최종 복합 CGH의 표현식을 다음과 같이 추가해야 합니다.
$$ H\left(x,y\right)=\sum \limits_{i=1}^n{G}_i\left(x,y\right)\cdotp \exp \left[i{\varphi}_j \left(x,y\right)\right] $$ (5)3D 구성에서 라이트 필드 조절은 유체 환경에서 입자의 3D 조작과 같은 실제 응용 프로그램에서 매우 의미가 있습니다. 따라서 우리는 다른 모양의 3D 곡선을 따라 강도와 위상이 규정된 HIG 빔의 생성을 연구합니다. 특히, 기울어진 링 그림 2a–e, 아르키메데스 나선 그림 2f–j, trefoil-knotted 곡선 그림 2k–o 및 사각 곡선 그림 2p–t를 고려합니다. 해당 곡선 표현은 표 1에 나와 있습니다. 이러한 3D 구조는 초점 영역에서 빔 전파를 따라 나타납니다. 초점면에서 측정된 빔 강도 분포(z =0)은 그림 2의 세 번째 열에 나와 있습니다. Z 그림 2의 다른 열에 해당하는 좌표는 시뮬레이션 다이어그램에 표시됩니다.
<그림>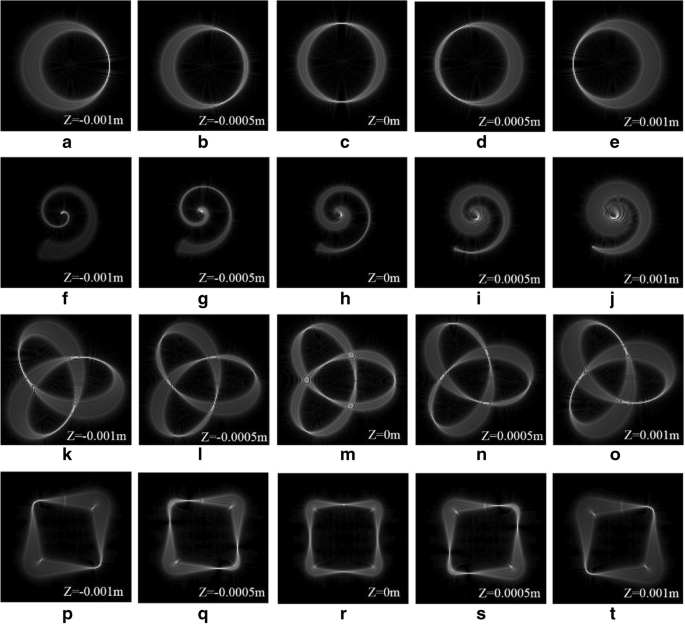
3D 트랙터 빔의 시뮬레이션 결과. –이 다른 z에 초점을 맞춘 3D 트랙터 빔의 링 커브 비행기. 에 –j 다른 z에 초점을 맞춘 3D 트랙터 빔의 아르키메데스 나선 비행기. 케이 –오 다양한 z에 초점을 맞춘 3D 트랙터 빔의 트레포일 매듭 곡선 비행기. p –t 다른 z에 초점을 맞춘 3D 트랙터 빔의 사각 곡선 비행기
광학 미세 조작 분야에서 3D 왜곡 정도가 다른 트랙터 빔은 응용 분야에서 더 큰 역할을 할 수 있습니다. 그러나 더 높은 효율성을 위해서는 서로 다른 위치에서 차별화된 조작을 동기적으로 수행하는 것이 매우 바람직합니다. 따라서 우리는 4개 패턴의 여러 트랙터 빔을 동시에 설계하며, 각각은 특정 정도의 3D 왜곡이 있는 규정된 기하학적 곡선에서 주어진 입자를 제한하는 데 사용할 수 있습니다. 트랙터 빔의 상대 위치를 설계할 수 있습니다. 여러 트랙터 빔이 3D 영역에 집중되어 있음을 보여주기 위해 관찰할 6개의 2D 평면을 선택했습니다. 트랙터 빔은 그림 3과 같이 서로 다른 2D 평면에 초점이 맞춰져 있습니다. 이러한 3D 구조는 초점 영역에서 빔 전파를 따라 나타납니다.
<그림>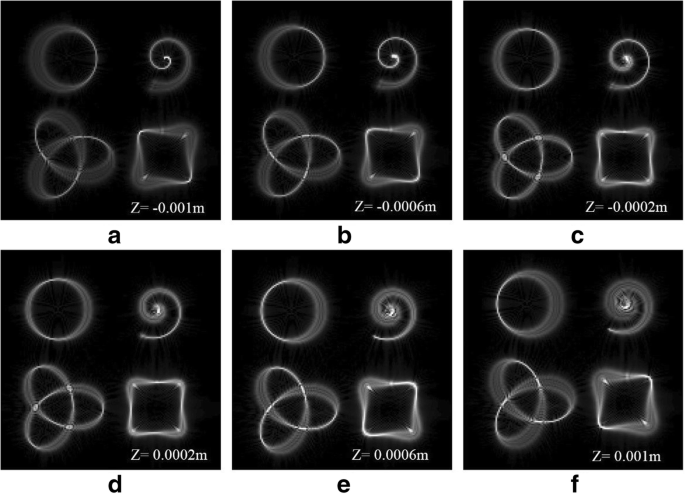
여러 위치에서 여러 3D 트랙터 빔의 시뮬레이션 결과. 아 –ㄷ 초점면 전 빔의 재구성된 강도. d –f 초점면 이후 빔의 재구성된 강도
여러 개의 조작된 입자의 상호 작용을 관찰하기 위해 구리와 같은 중첩 그래픽 트랙터 빔을 설계했습니다. 내부 빔과 외부 빔의 3D 왜곡 및 모양을 별도로 설계할 수 있습니다. 링 커브는 평면(z =0)이고 사각 곡선에는 어느 정도의 3D 왜곡이 있습니다[그림 4a–e 참조]. 정사각형 곡선은 평면(z =0)이고 링 곡선은 어느 정도의 3D 왜곡을 가지고 있습니다[그림 4f–j 참조]. 초점면에서 측정된 빔 강도 분포(z =0)은 그림 4의 세 번째 열에 나와 있습니다. z 그림 4의 다른 열에 해당하는 좌표는 시뮬레이션 다이어그램에 표시됩니다. 트랙터 빔의 모양을 유연하게 조정하여 다양한 위치에서 입자를 제어할 수 있습니다.
<그림>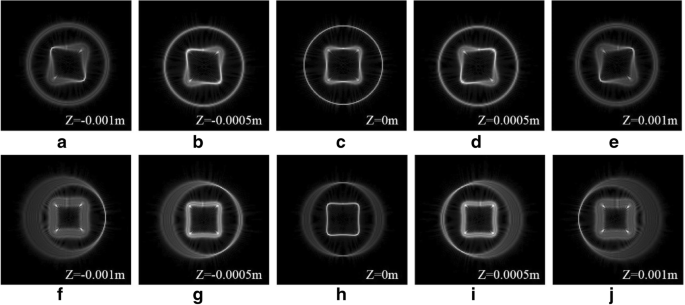
구리와 같은 중첩 그래픽 트랙터 빔의 시뮬레이션 결과. 아 –이 기울어진 사각형 곡선 모양의 빔은 다른 z에 초점을 맞춥니다. 비행기. 에 –j 기울어진 링 곡선 모양의 빔은 다른 z에 초점을 맞춥니다. 비행기
위에서 소개한 방법이 조정 가능한 포커싱 영역에서 여러 3D 트랙터 빔을 포커싱하는 목적을 달성하는 데 사용할 수 있음을 확인하기 위해 광학 실험이 수행되었습니다. 그림 5와 같이 3D 트랙터 빔을 생성하기 위한 광학 설정은 액정 SLM(Spatial Light Modulator), 4f 필터링 시스템 및 푸리에 변환(초점) 렌즈로 구성됩니다. 파장이 532 nm인 고체 레이저는 평면파 조명에 시준됩니다. SLM(Holoeye Pluto, 8픽셀 피치, 1920 × 1080 해상도)은 위상 전용 CGH를 처리하는 데 사용됩니다. 복잡한 CGH H를 인코딩하기 위해 이중 위상 방법[18, 20]을 사용합니다. (x ,y ) 식에 의해 계산 (4) 단계 전용 CGH로. 이는 복잡한 기능을 홀로그램으로 SLM에 인코딩하는 것으로 구성됩니다. 그런 다음 SLM에 의해 변조된 빔은 푸리에 변환 렌즈(f =400 mm) 4f 광학 필터링 구성을 통해. CCD(전하 결합 소자) 카메라는 생성된 강도 패턴을 기록하기 위해 초점 렌즈의 푸리에 평면에 배치됩니다. 3D 트랙터 빔의 결과는 그림 6에 나와 있습니다. 결과 빔은 4f 광학 시스템을 통과한 후 오류가 있지만 시뮬레이션 결과와 잘 일치합니다.
<사진>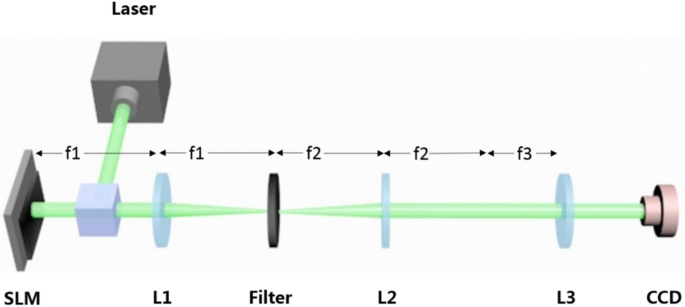
실험 설정. 홀로그램은 시준된 레이저 빔으로 조명되는 SLM으로 전달됩니다. 빔이 렌즈 1을 통과한 후 원하는 패턴을 조리개로 필터링할 수 있습니다. 그런 다음 결과 빔은 렌즈 2와 렌즈 3을 통과하고 카메라에 포착될 수 있습니다.
<그림>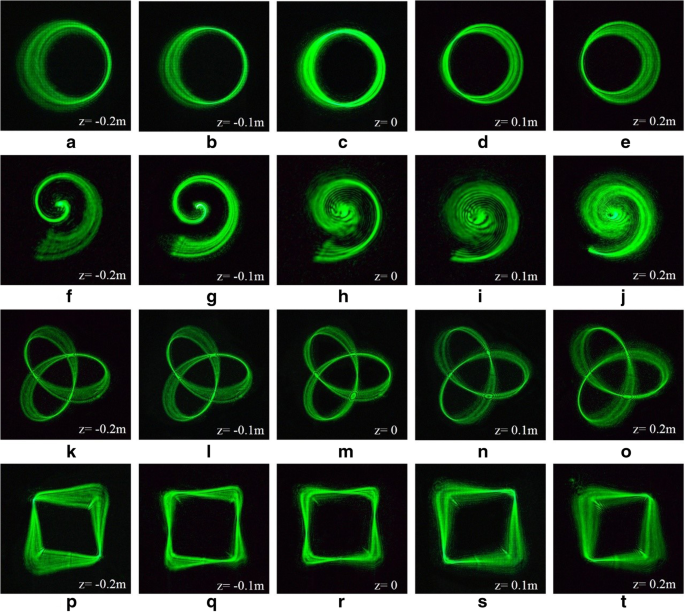
3D 트랙터 빔의 실험 결과. 아 –이 다른 z에 초점을 맞춘 3D 트랙터 빔의 링 커브 비행기. 에 –j 다른 z에 초점을 맞춘 3D 트랙터 빔의 아르키메데스 나선 비행기. 케이 –오 다양한 z에 초점을 맞춘 3D 트랙터 빔의 트레포일 매듭 곡선 비행기. p –t 다른 z에 초점을 맞춘 3D 트랙터 빔의 사각 곡선 비행기
다중 3D 트랙터 빔의 결과는 그림 7에 나와 있습니다. 우리는 관찰할 6개의 2D 평면을 선택했으며 이는 시뮬레이션과 비교하기에 편리합니다. 시뮬레이션 결과는 실험 결과와 잘 일치합니다. 이 방법은 여러 개의 3D 트랙터 빔을 유연하고 효율적으로 생성할 수 있음이 확인되었습니다. 어느 정도의 3D 왜곡이 있는 다른 빔은 입자를 가둘 수 있습니다.
<그림>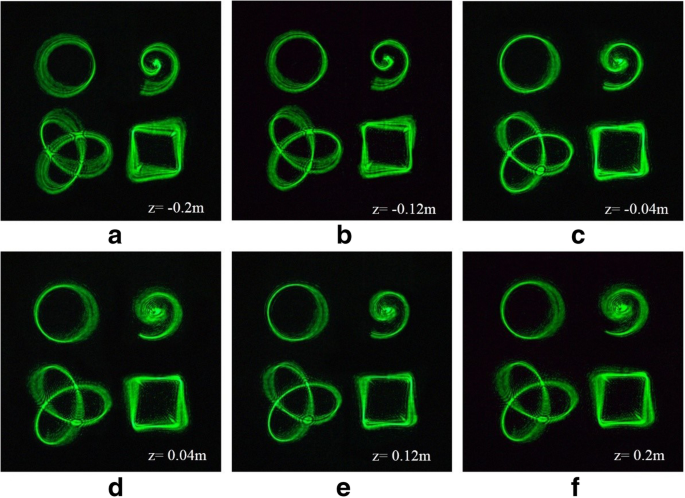
여러 위치에서 여러 3D 트랙터 빔의 실험 결과. 아 –ㄷ 초점면 전 빔의 재구성된 강도. d –f 초점면 이후 빔의 재구성된 강도
구리와 같은 중첩 그래픽 트랙터 보의 결과는 그림 8에 나와 있습니다. 시뮬레이션 결과는 실험 결과와 잘 일치합니다. 따라서 두 개의 중첩된 빔은 서로 거의 상호 작용하지 않습니다. 트랙터 빔은 다양한 곡선에서 다중 입자 조작에 사용할 수 있습니다.
<그림>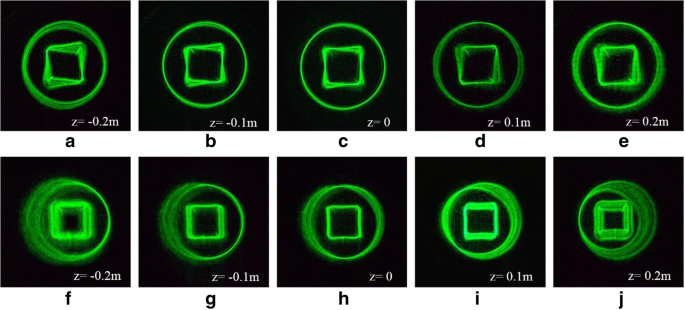
구리와 같은 중첩 그래픽 트랙터 빔의 실험 결과. 아 –이 기울어진 사각형 곡선 모양의 빔은 다른 z에 초점을 맞춥니다. 비행기. 에 –j 기울어진 링 곡선 모양의 빔은 다른 z에 초점을 맞춥니다. 비행기
우리는 독립적으로 조절되는 공간적 위치를 가진 다중 3D 트랙터 빔을 설계합니다. 한편, 각각의 개별 빔은 임의의 기하학적 곡선을 따라 규정되고 원하는 대로 임의의 각도로 비틀릴 수 있습니다. 우리는 3D 구성에서 광학 트랙터 빔의 생성이 쉽게 달성될 수 있음을 이론적으로 그리고 실험적으로 증명합니다. 고강도 구배와 위상 구배는 입자를 포착하는 능력이 있습니다. 현재 실험이 수행되었으며 광학 와류 빔은 입자를 최소한으로 손상시킵니다. 우리의 작업은 트랙터 빔의 유형을 확장합니다. 여러 광학 응용 분야를 위한 트랙터 빔의 추가 개발에 의미 있고 유용한 것으로 여겨집니다.
2차원
3차원
컴퓨터 생성 홀로그램
고강도 그라데이션
공간 광 변조기
나노물질
이 기사에서는 Contraflexure의 각도가 무엇인지 배울 것입니다. Contraflexure의 각도는 무엇입니까? 곡선이 오목에서 볼록으로 이동하는 각도입니다. 또는 힐이 있는 복원 레버( GZ )의 비율이 변경되는 힐 각도입니다. 즉, 이 지점 이전에는 힐이 있는 복원 레버의 비율이 증가하지만 이 지점 이후에는 복원 레버의 비율이 감소합니다. 반드시 읽어야 함:- 배는 어떻게 움직이는가 의미는 무엇입니까? 이 지점의 물리적 의미는 Deck가 바다 표면에 닿는 지점 또는 각도라는 것입니다. 아래 그림은 특정 하중
연속보는 하중이나 힘이 가해질 때 굽힘에 대한 저항을 제공하는 구조적 구성요소입니다. 이 빔은 일반적으로 교량에 사용됩니다. 이 유형의 빔에는 길이를 따라 2개 이상의 지지점이 있습니다. 이들은 일반적으로 동일한 수평면에 있으며 지지대 사이의 스팬은 하나의 직선에 있습니다. 단순히 지지되는 빔과 달리 , 양쪽 끝에 지지대가 있고 길이를 따라 어떤 식으로든 하중이 분산되어 있는 연속 빔은 훨씬 더 강하고 강합니다. 단지 두 개의 지지대 사이에 걸쳐 있는 보로 구성된 교량을 단순지지보 교량이라고 합니다. 두 개 이상의 보가 여러 개의