

제조공정

산업 제조
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
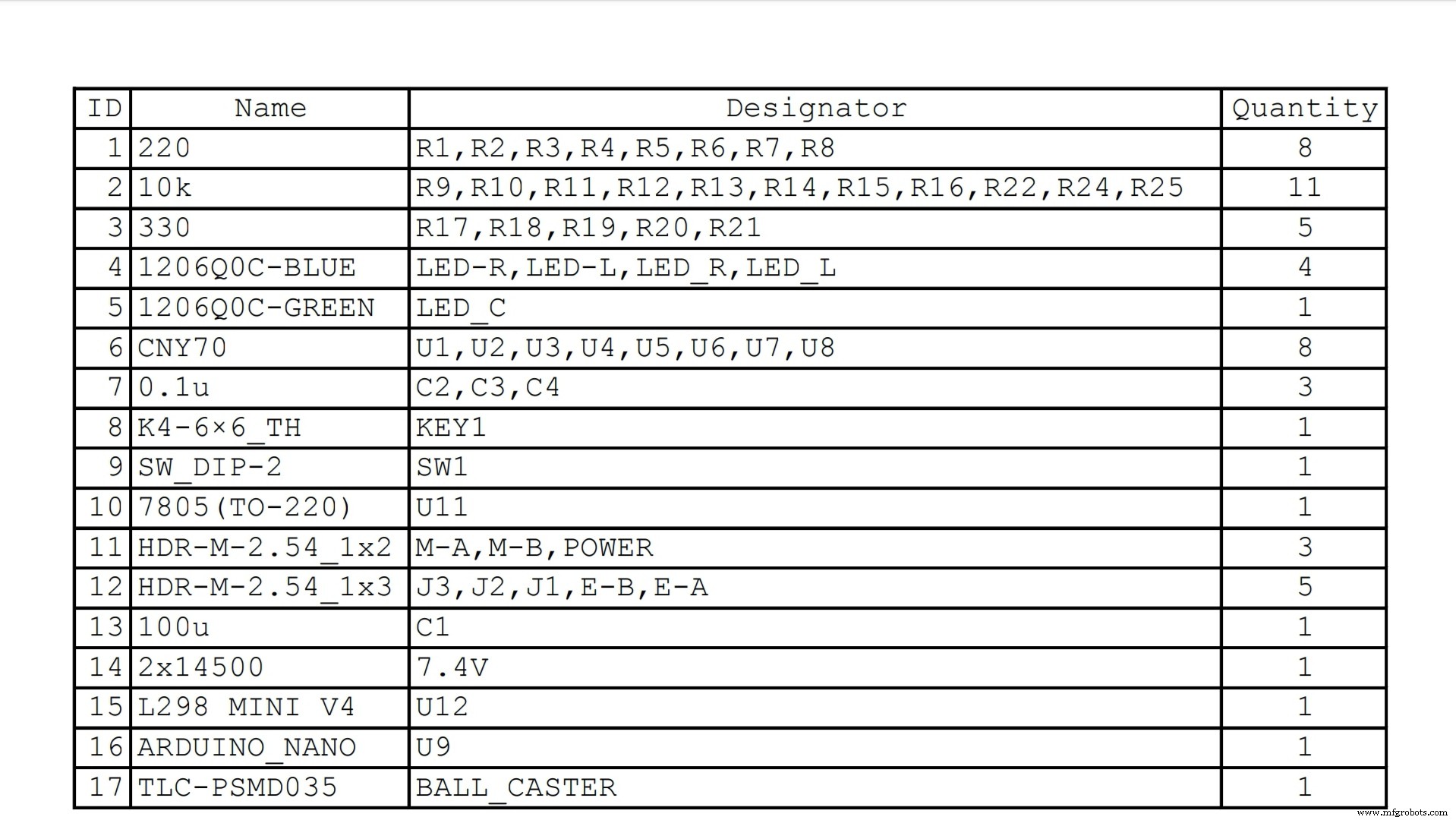
| × | 8 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 4 | ||||
| × | 1 | ||||
| × | 8 | ||||
| × | 11 | ||||
| × | 5 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 3 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 2 | ||||
 |
| × | 1 |
 |
| |||
 |
| |||
 |
| |||
 |
|
 |
|
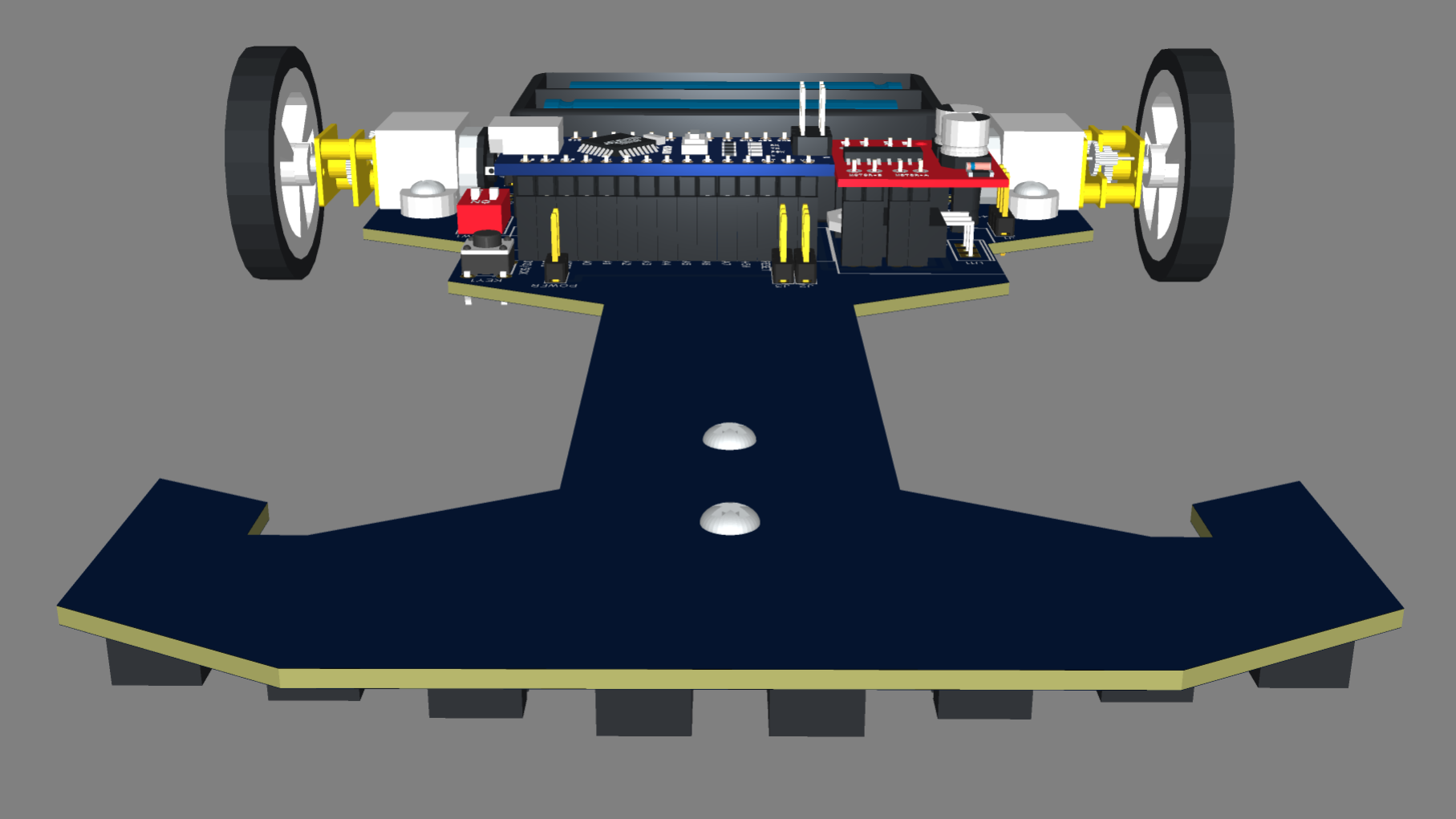
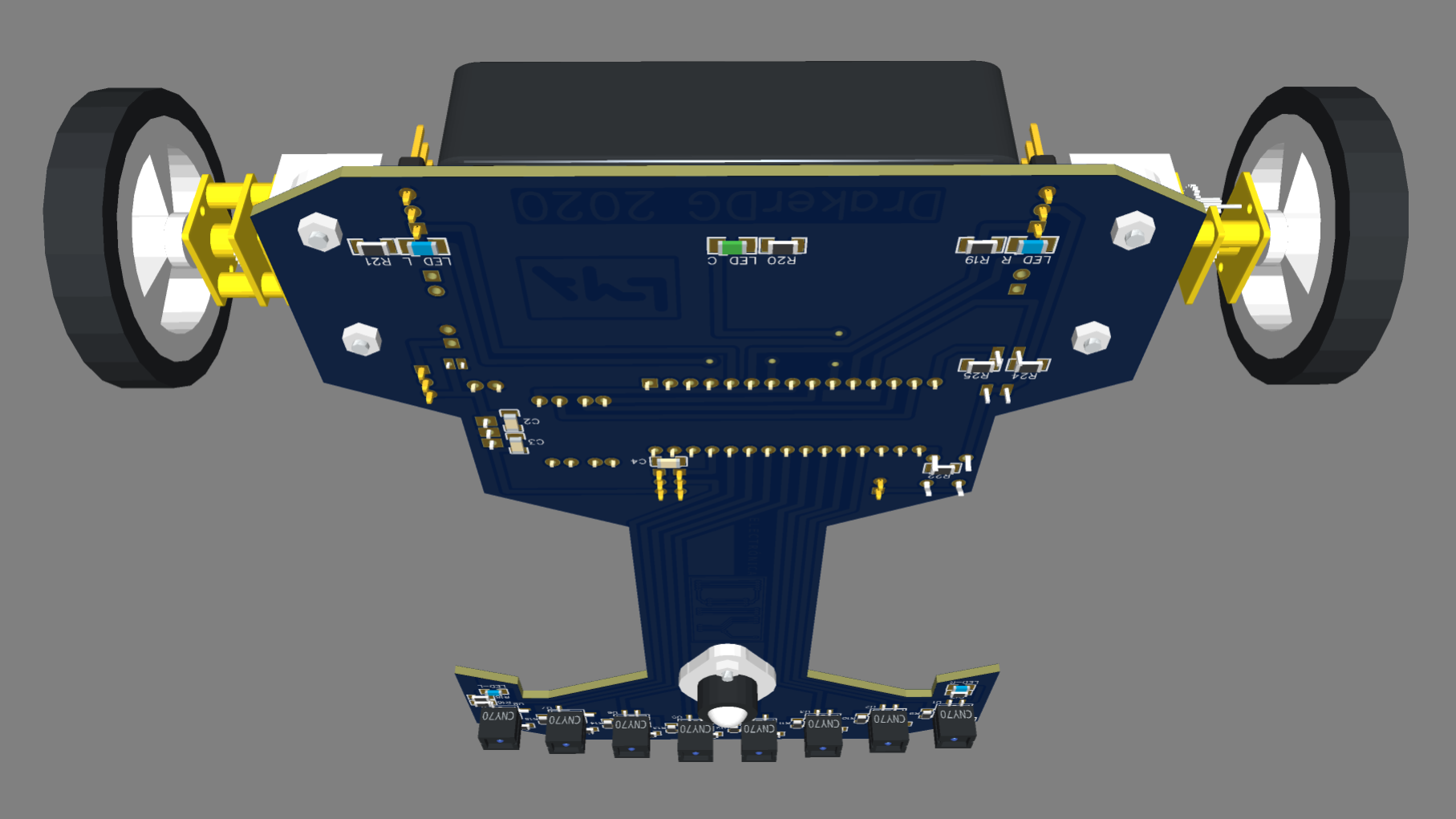
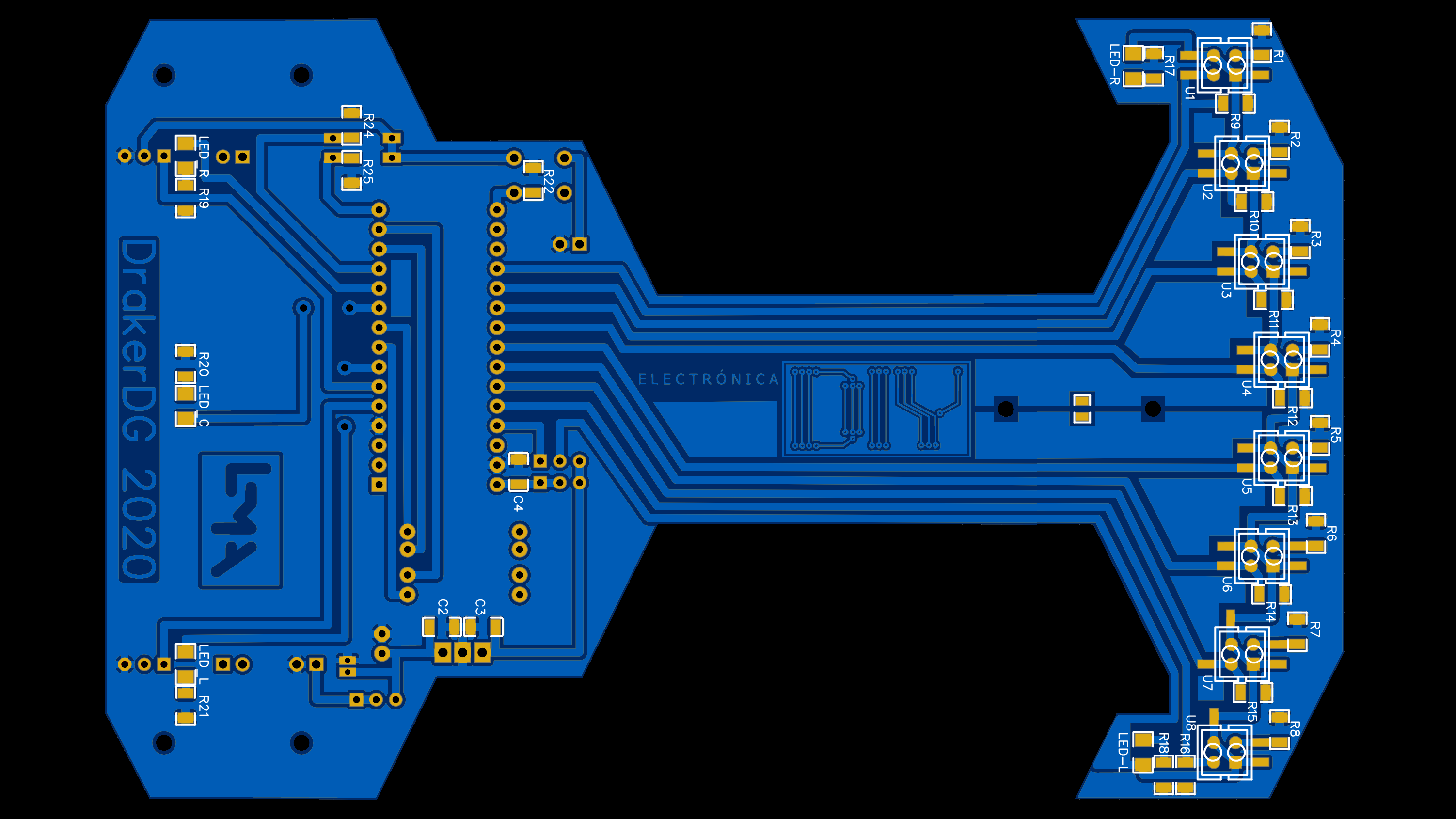
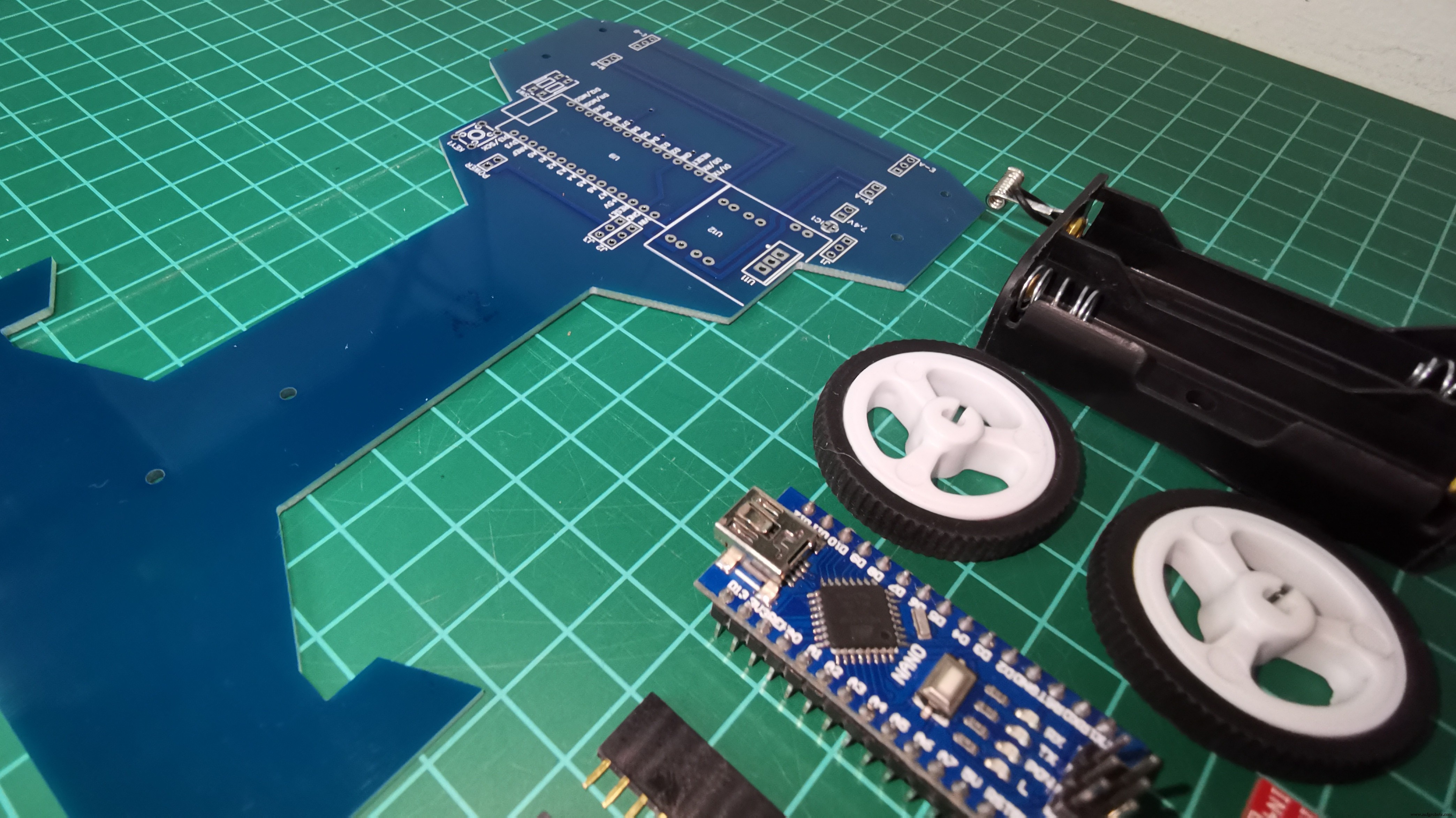
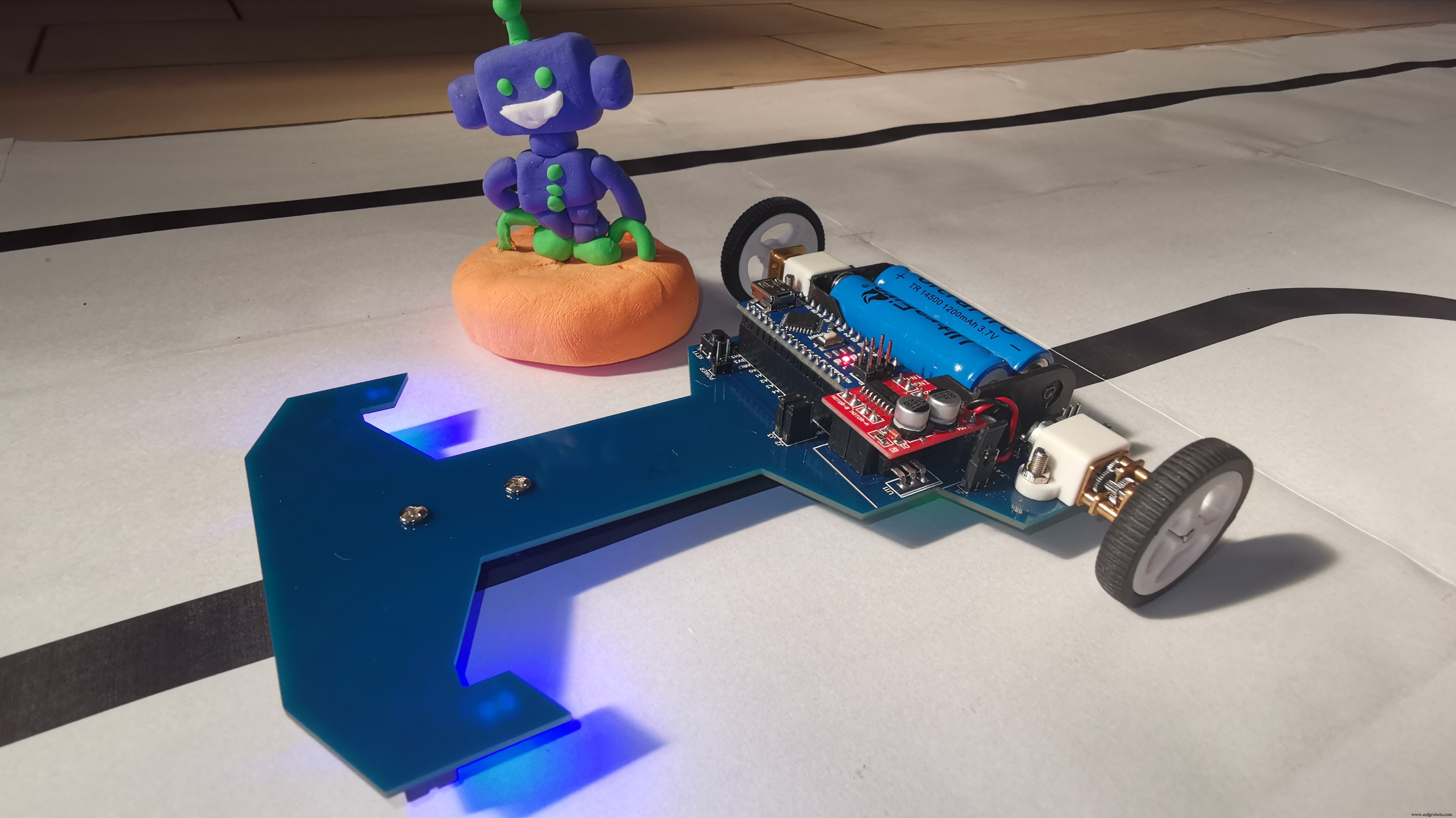
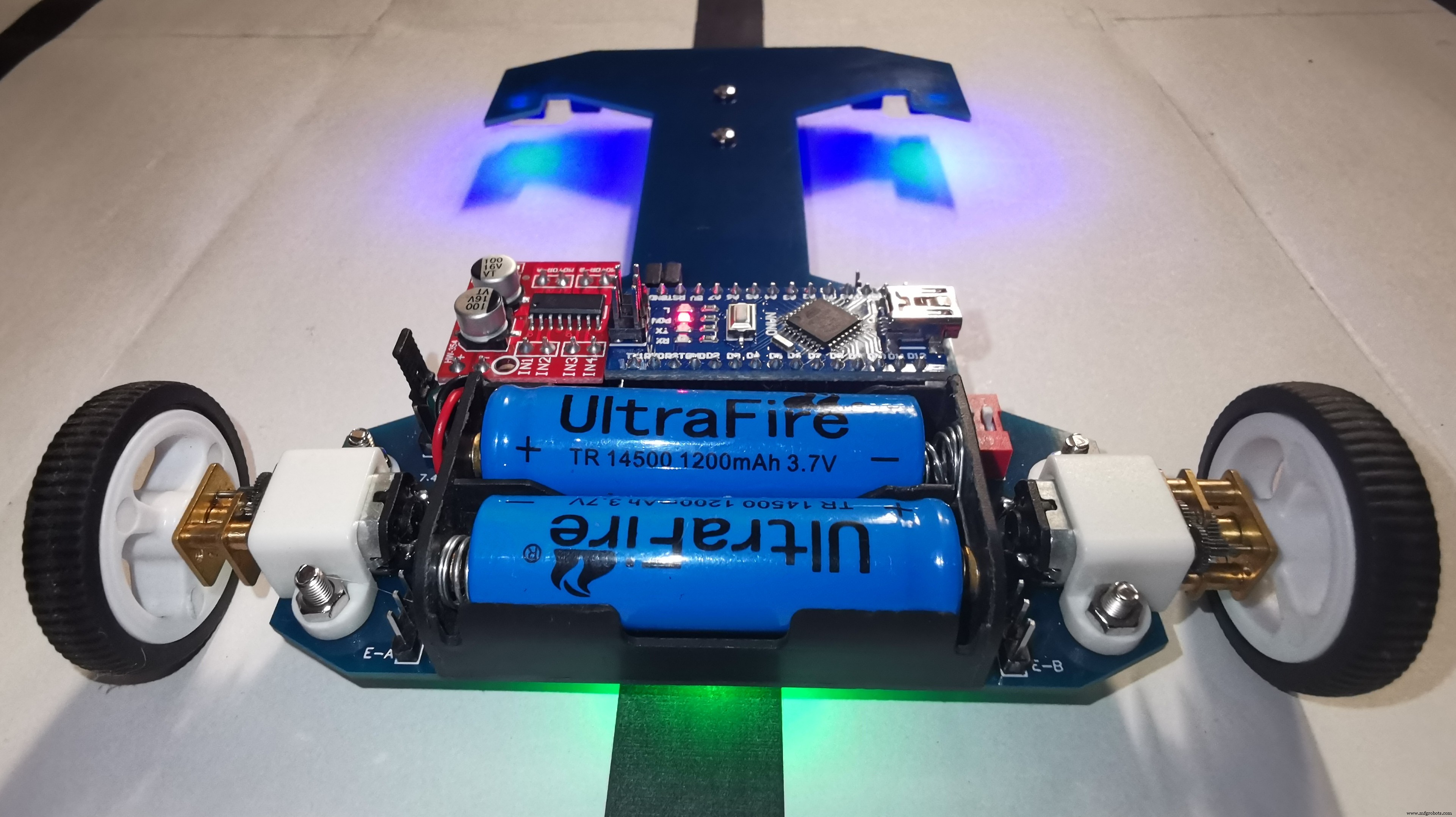
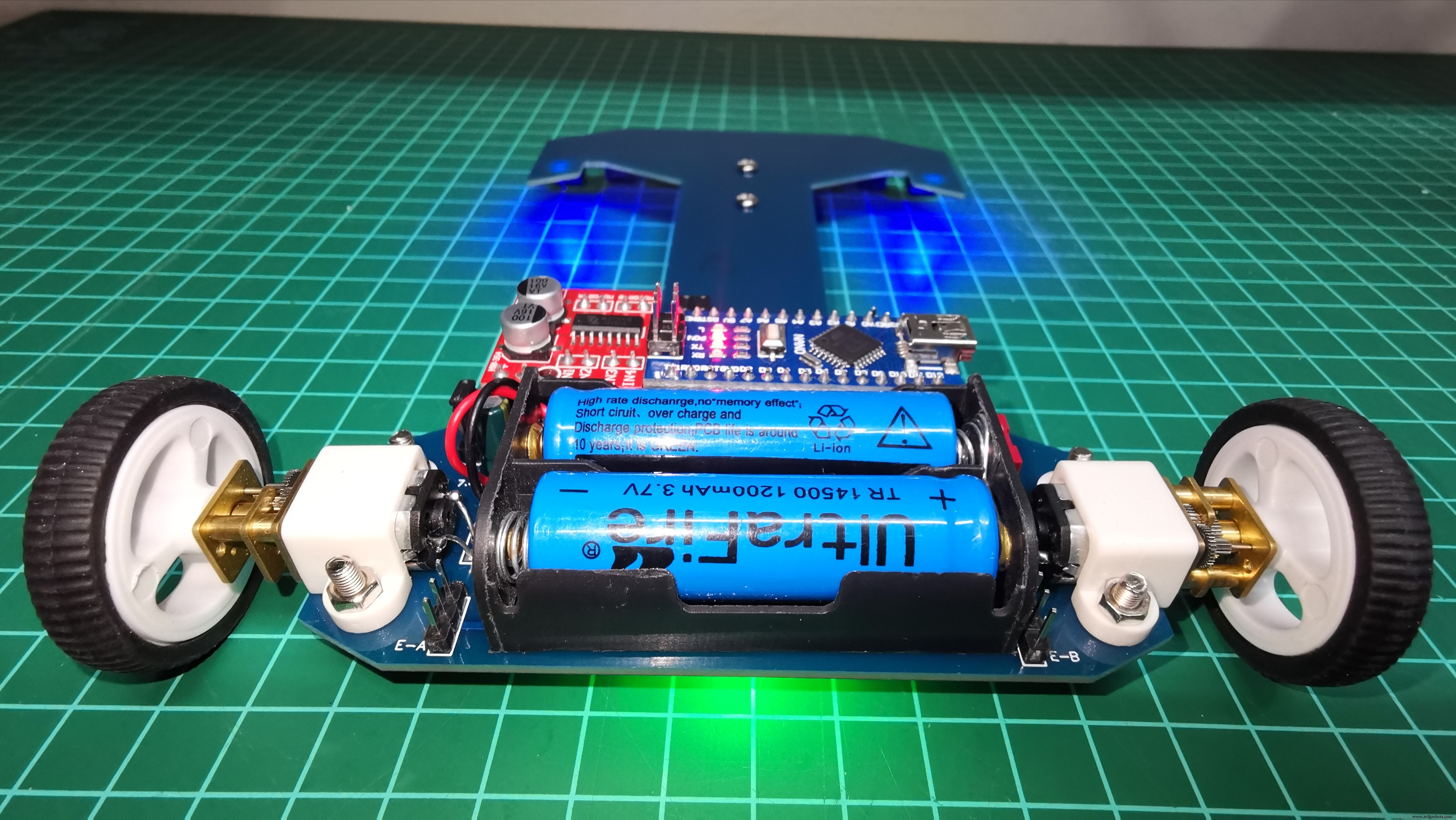
이것은 나의 두 번째 라인 팔로워 로봇(버전 4)입니다. 이전과 달리 EasyEDA를 이용하여 인쇄회로기판을 설계하였습니다. 이 인쇄 회로는 로봇의 섀시 역할을 합니다. PCB 제조는 JLCPCB에서 수행했으며 기록적인 시간 내에 인상적인 품질과 배송으로 내 기대를 뛰어 넘었다고 말해야 합니다.
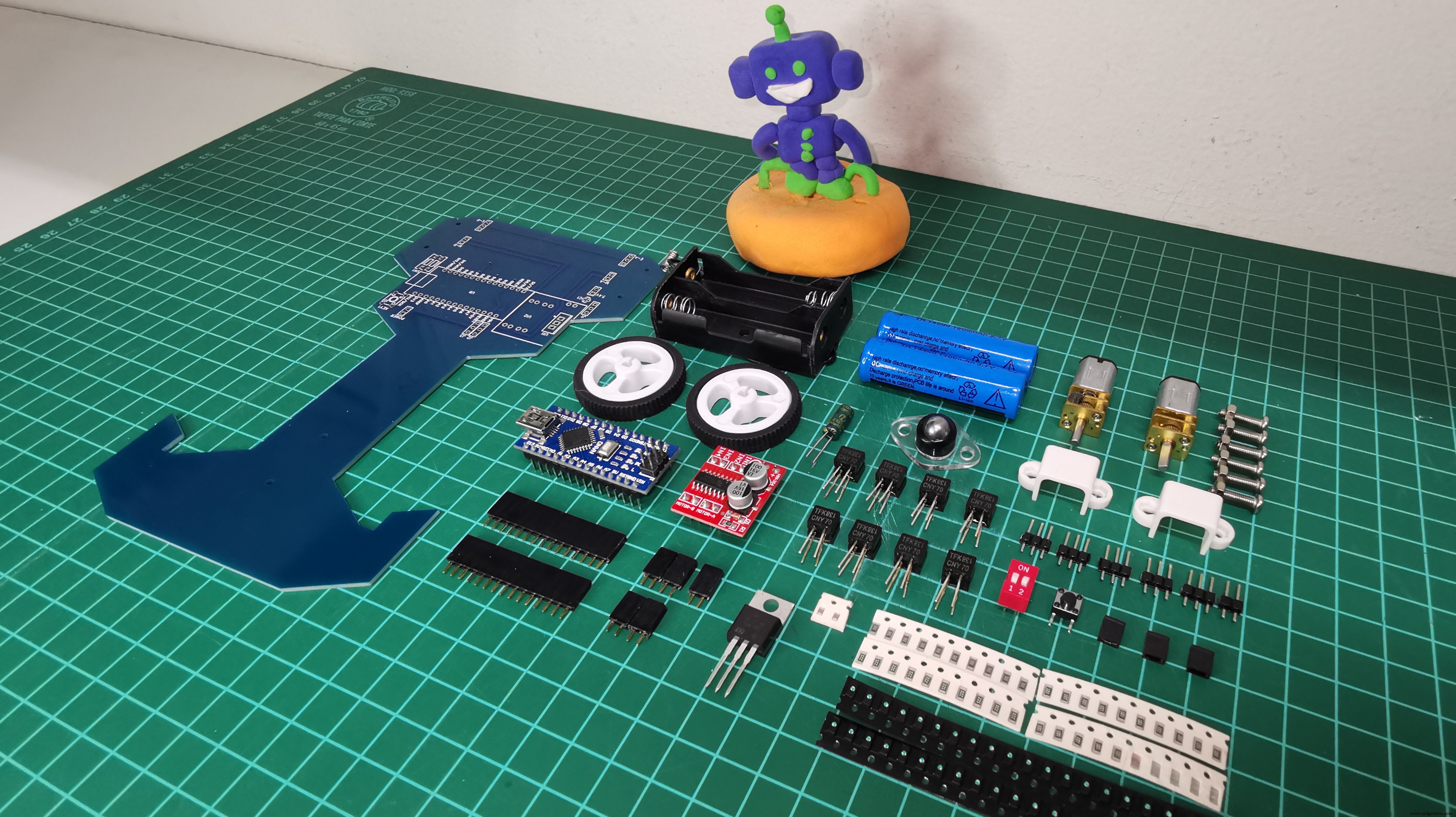
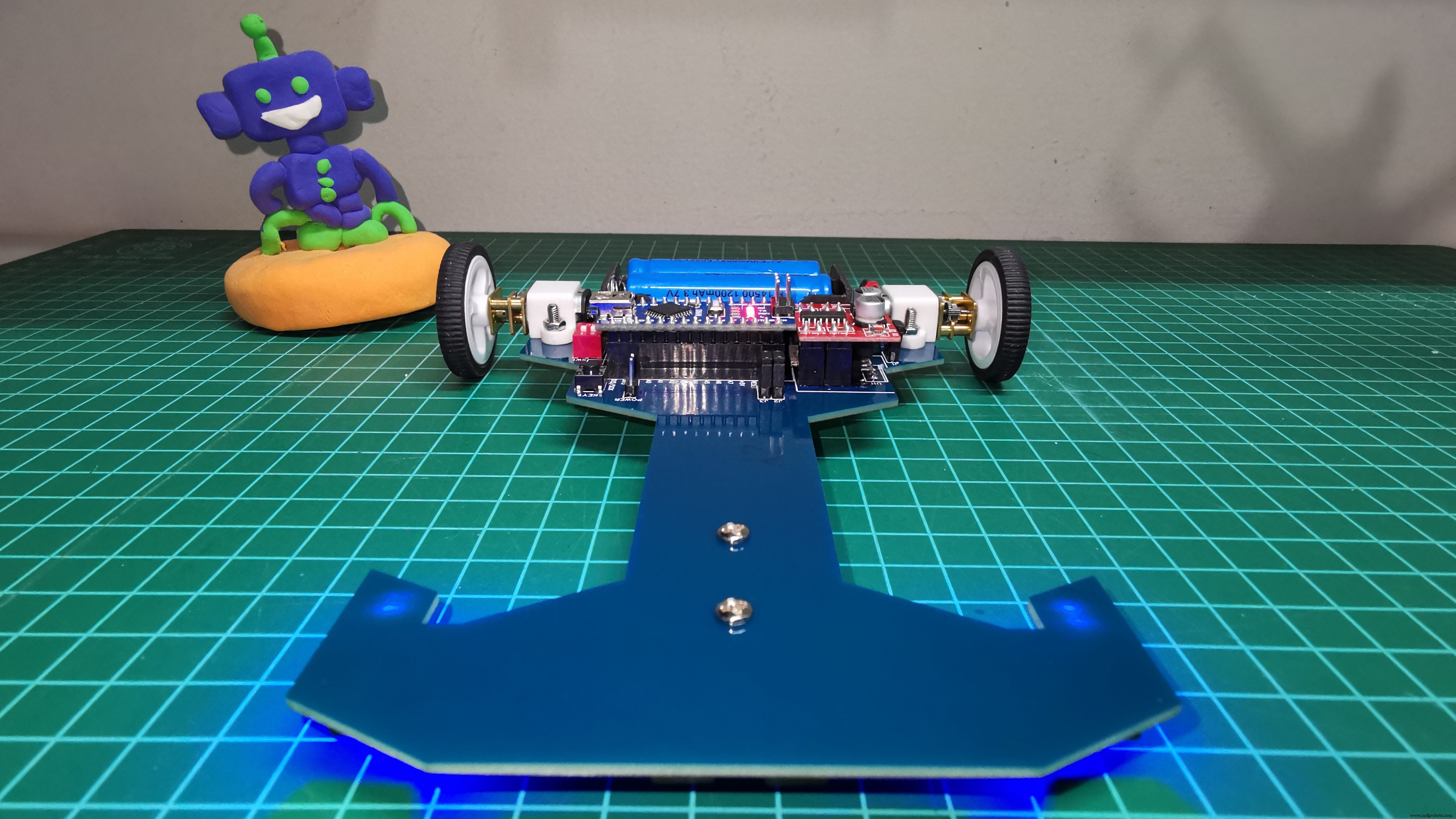
다음 비디오는 TinkerCAD에서 디자인한 3D 모델을 포함시킨 프로토타입의 최종 결과를 보여줍니다.
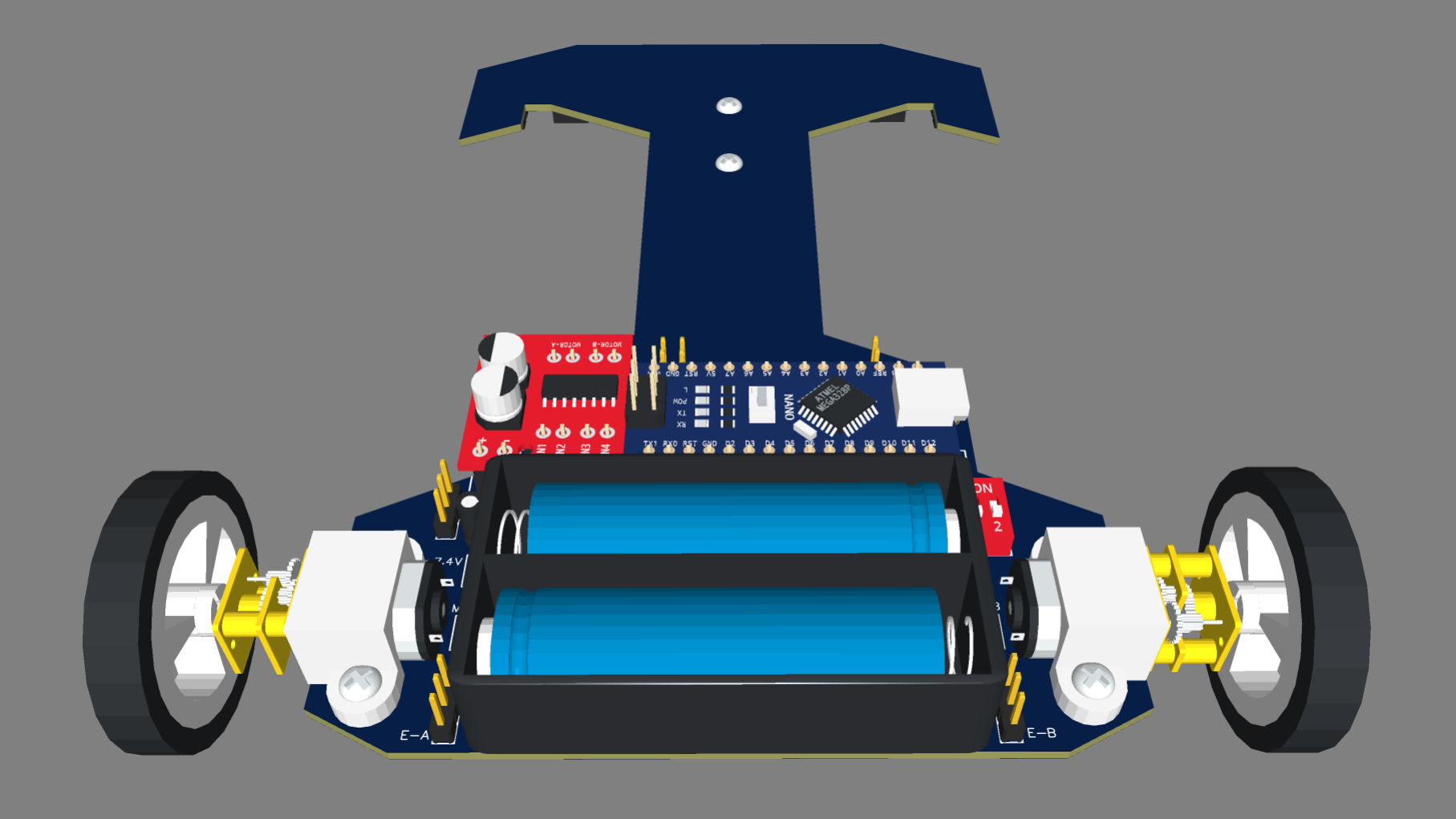
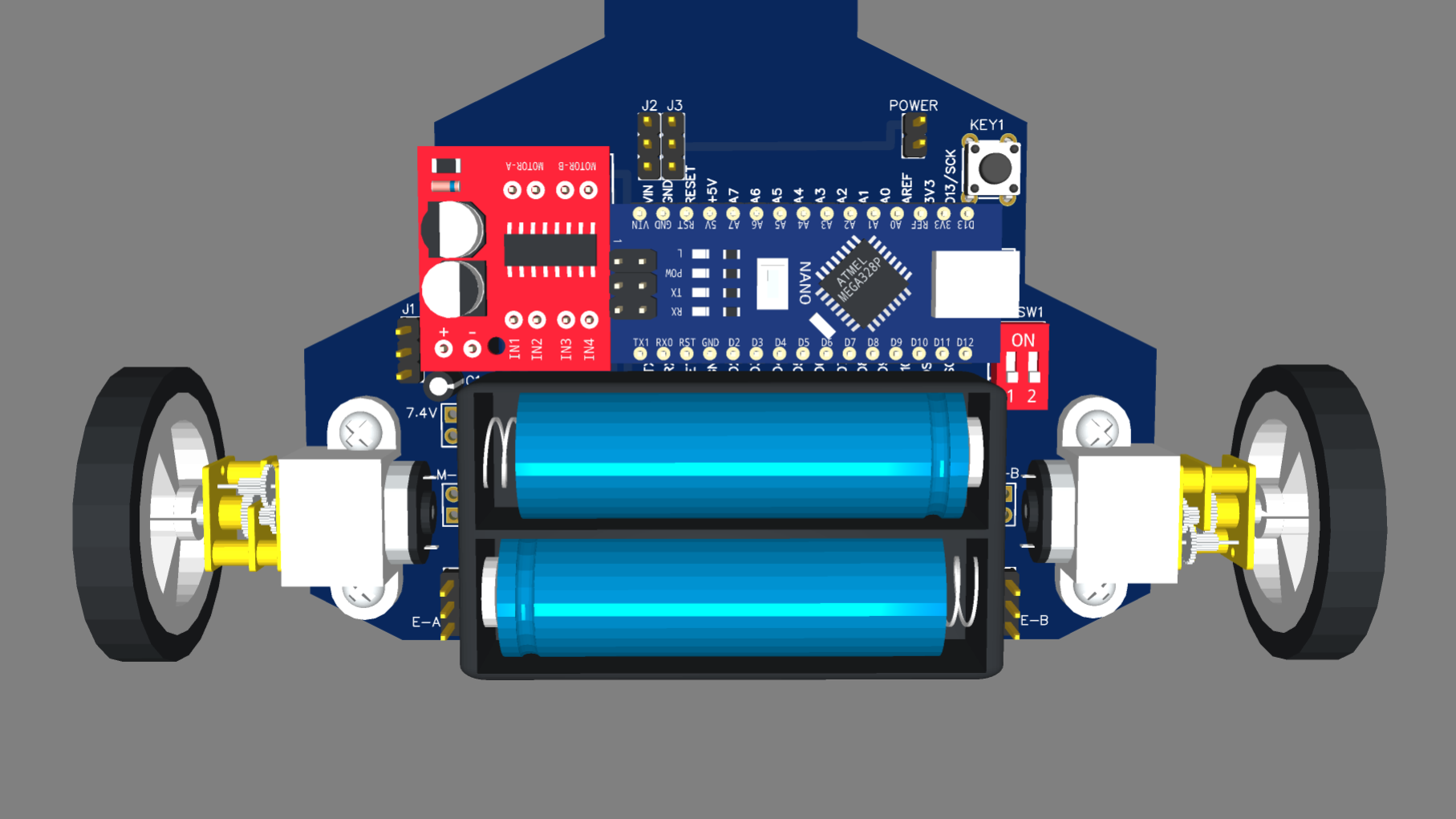
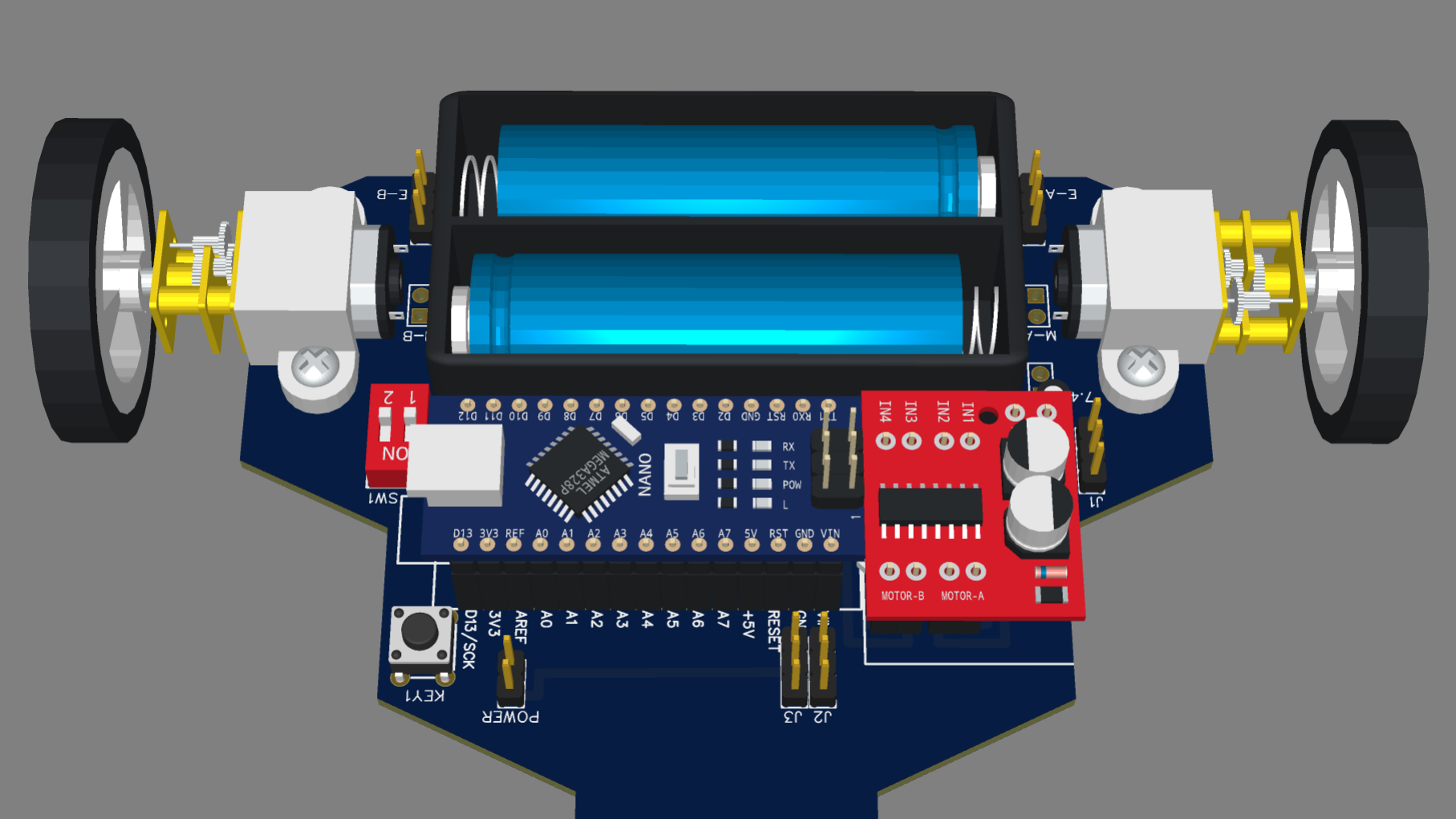
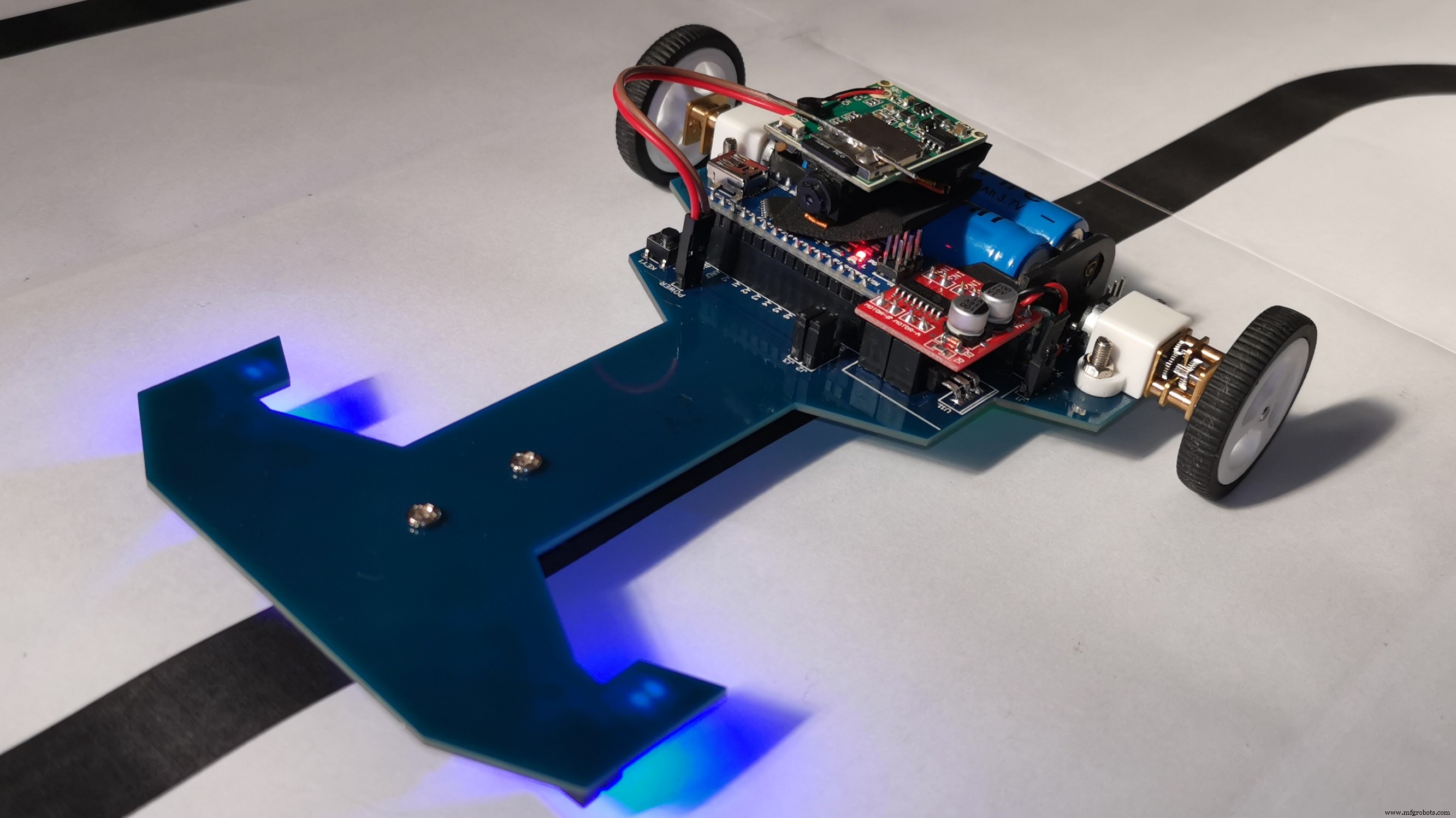
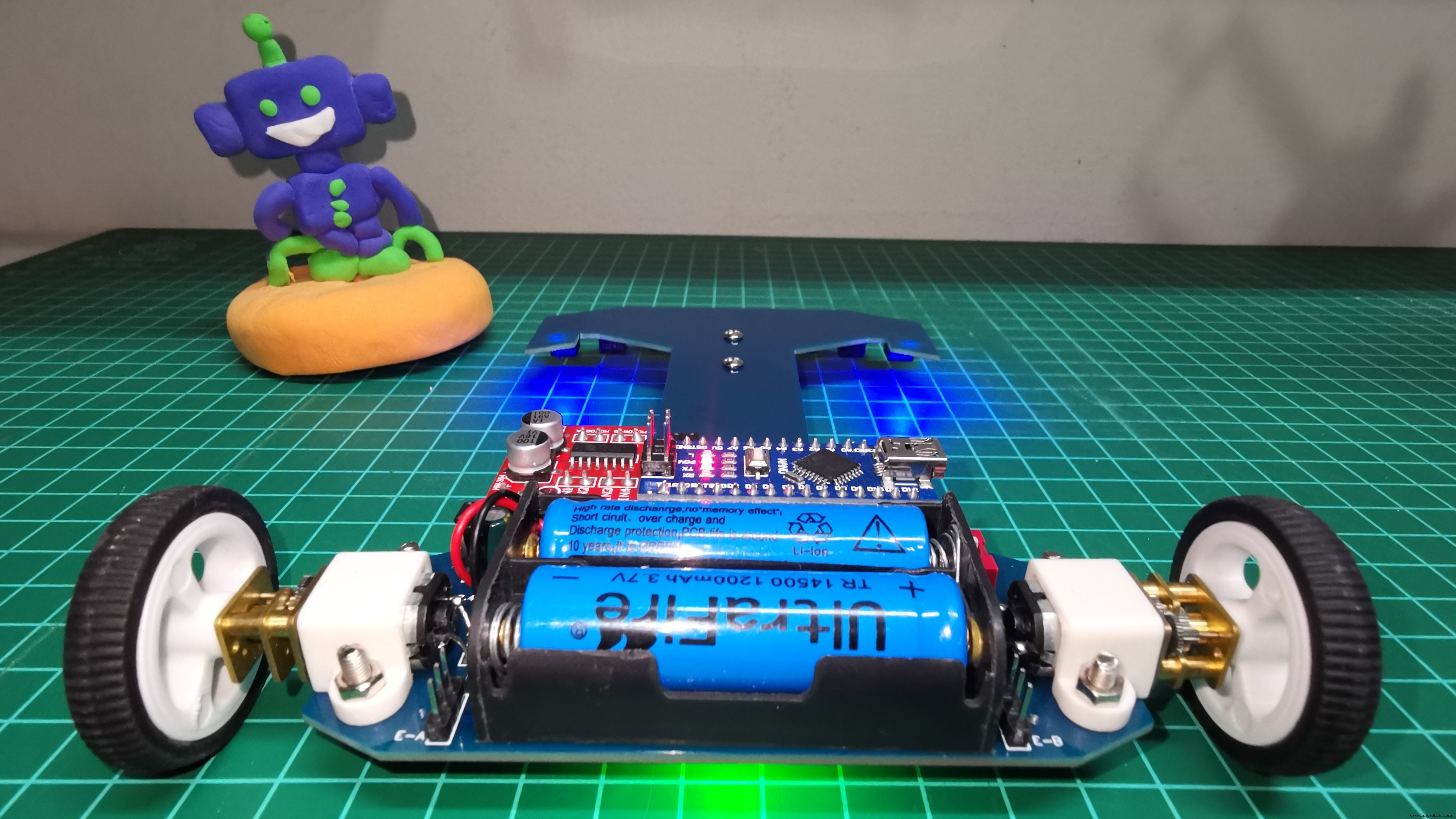
다음 비디오에서는 Mini Motor Driver(MX1508)로 수행한 테스트를 보여줍니다.
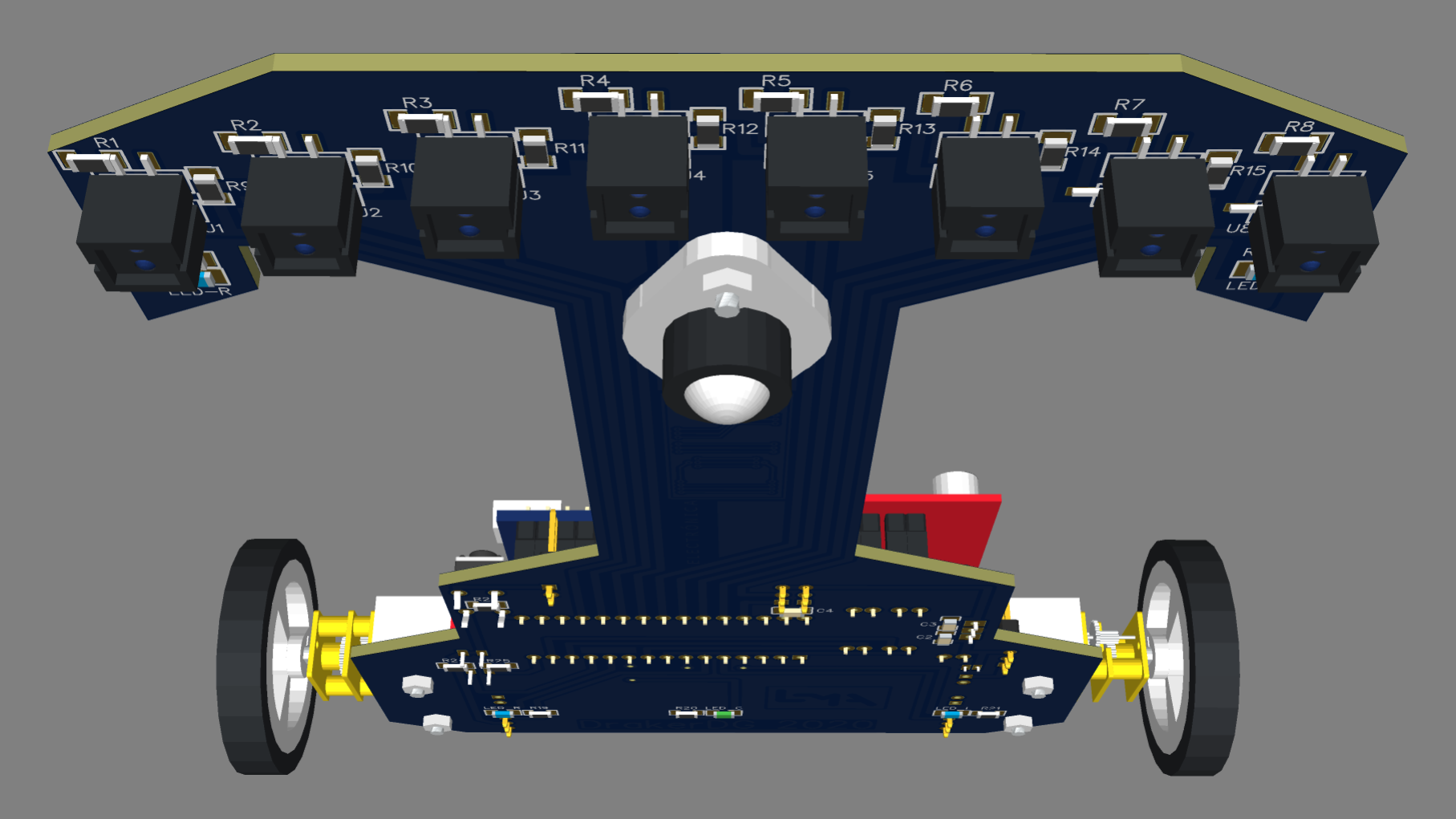
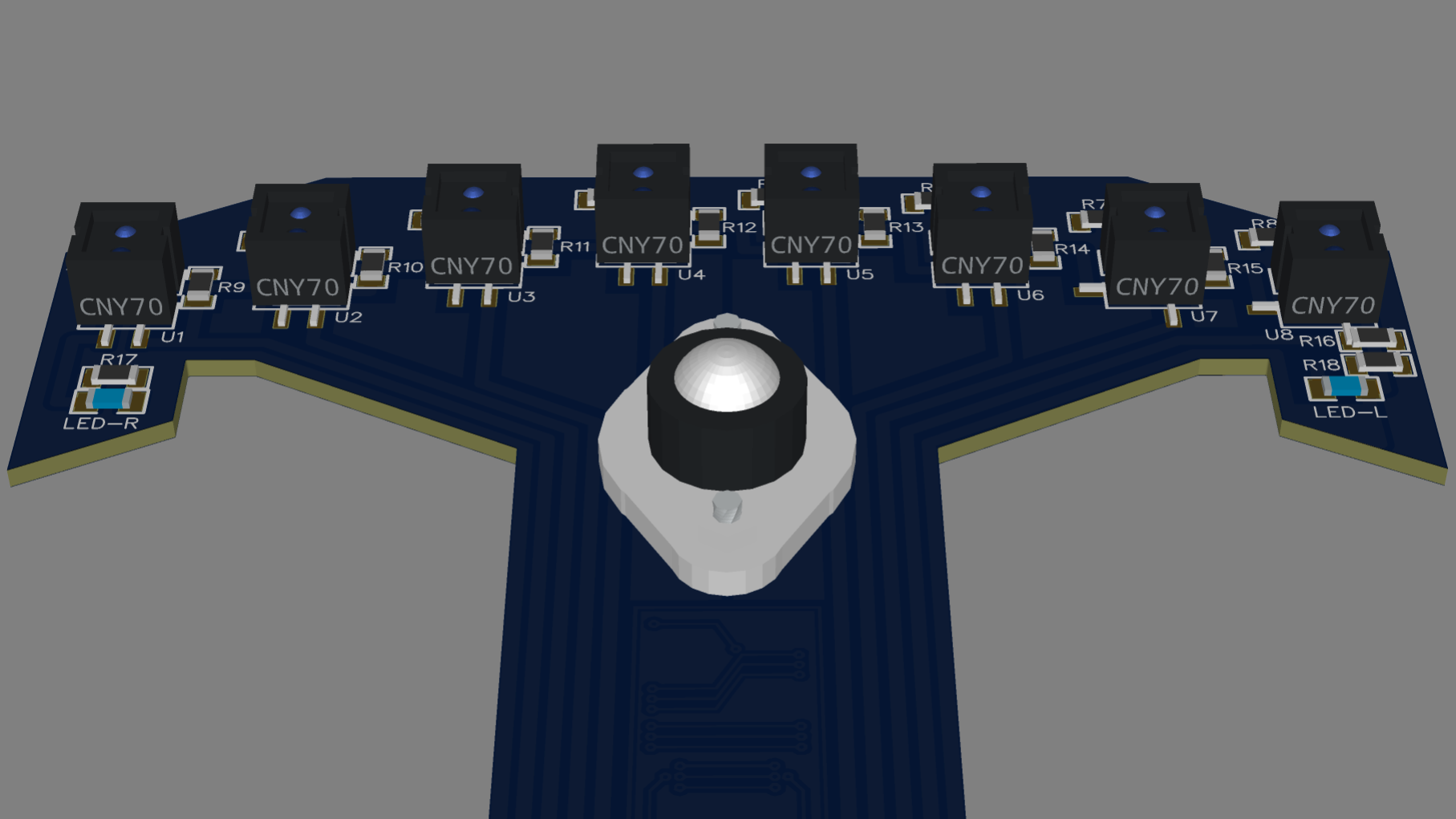
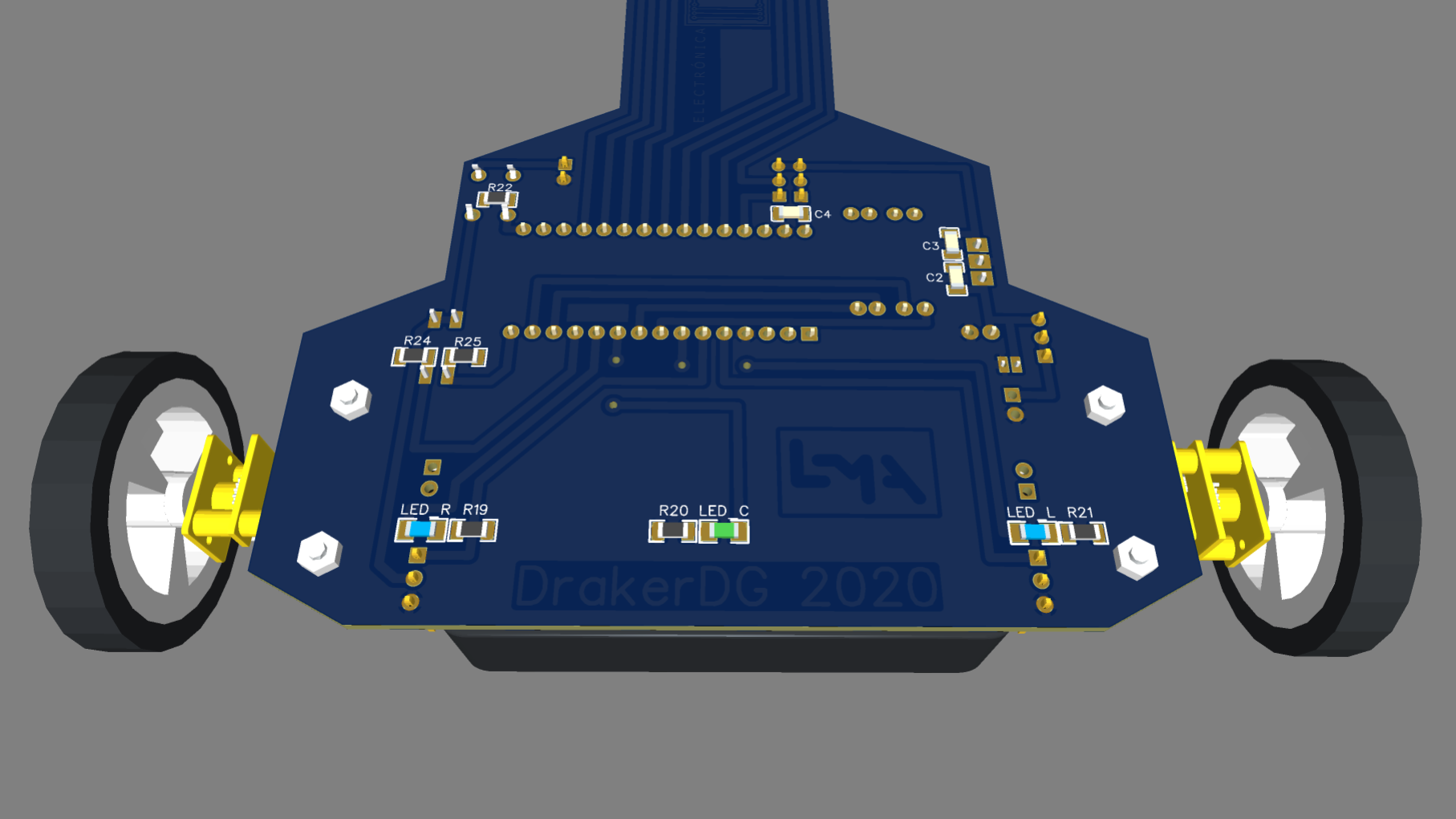
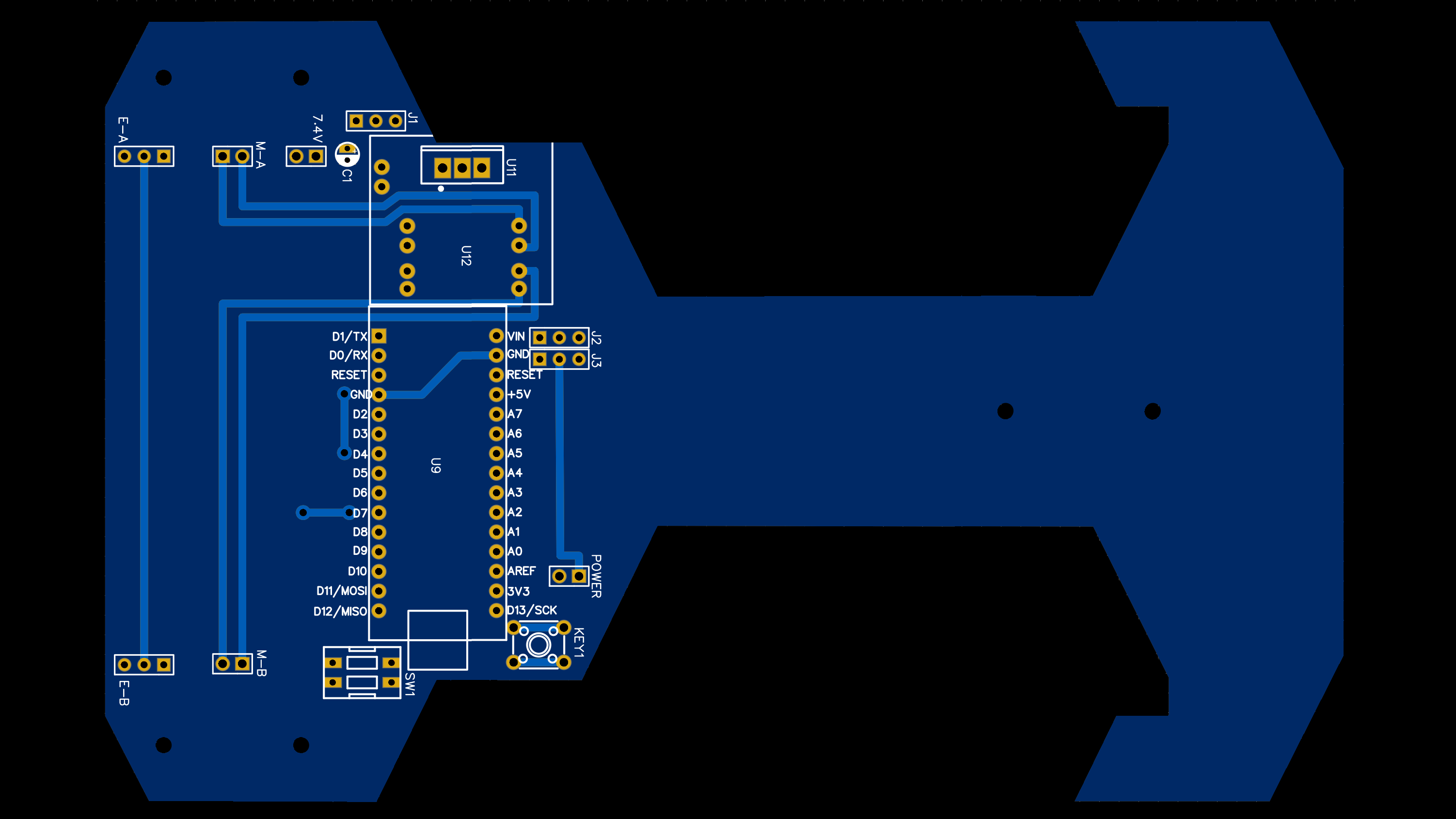
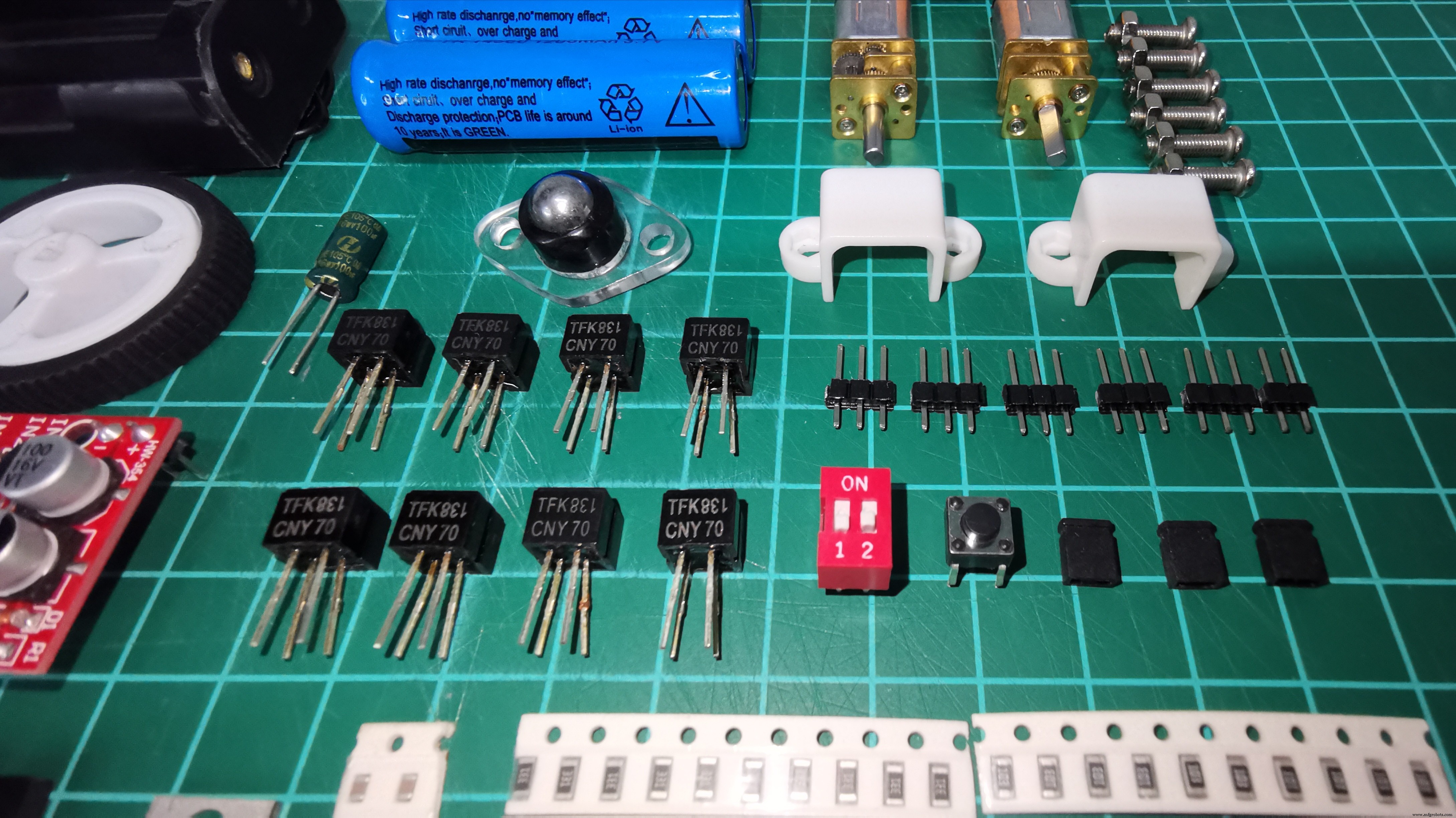
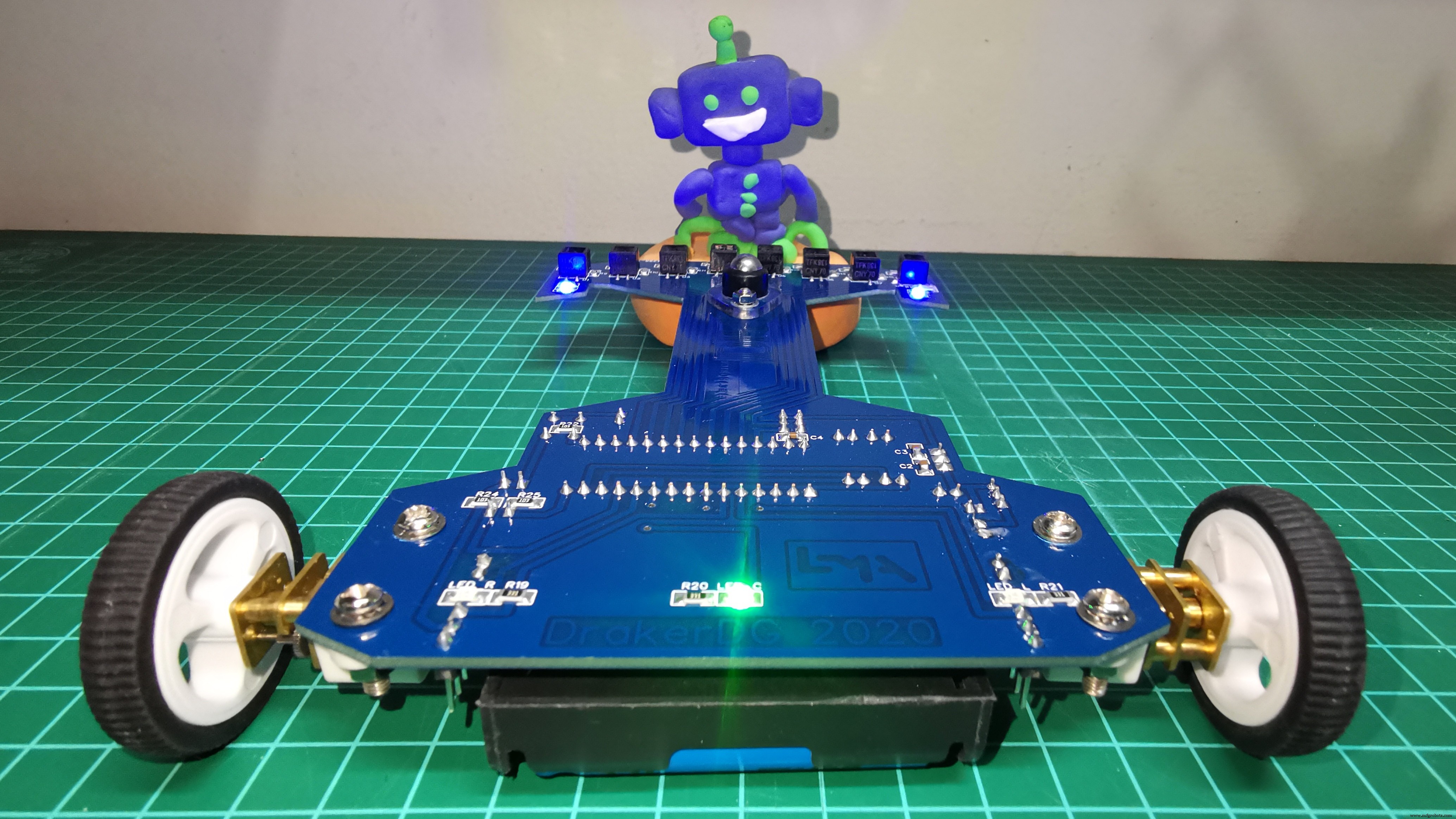
다음 비디오에서는 8개의 CNY70 센서를 사용한 테스트를 보여줍니다. 이 센서는 Arduino Nano의 포트 A0 ~ A7을 통해 아날로그 방식으로 측정됩니다. 초기 알고리즘을 사용하여 0에서 1000 사이의 범위를 정규화하여 센서를 보정합니다. 여기서 0은 흰색 배경을 나타내고 1000은 검은색 선을 나타냅니다. 보정이 완료되면 루프에 진입하여 판독 주기를 시작하여 각각 왼쪽 센서에서 오른쪽 센서로 나타내는 0에서 7000까지의 위치를 계산합니다. 이 위치 값은 비례 오차 P를 계산하는 데 사용됩니다. P의 범위는 -3500(왼쪽) ~ 3500(오른쪽)이며 0이 중심 값입니다. 이 알고리즘은 블랙 라인을 감지한 마지막 센서(왼쪽 또는 오른쪽)의 위치 값을 기억합니다. 이 데이터는 제동 동작 및 라인 복구에 사용할 목적으로 사용됩니다.
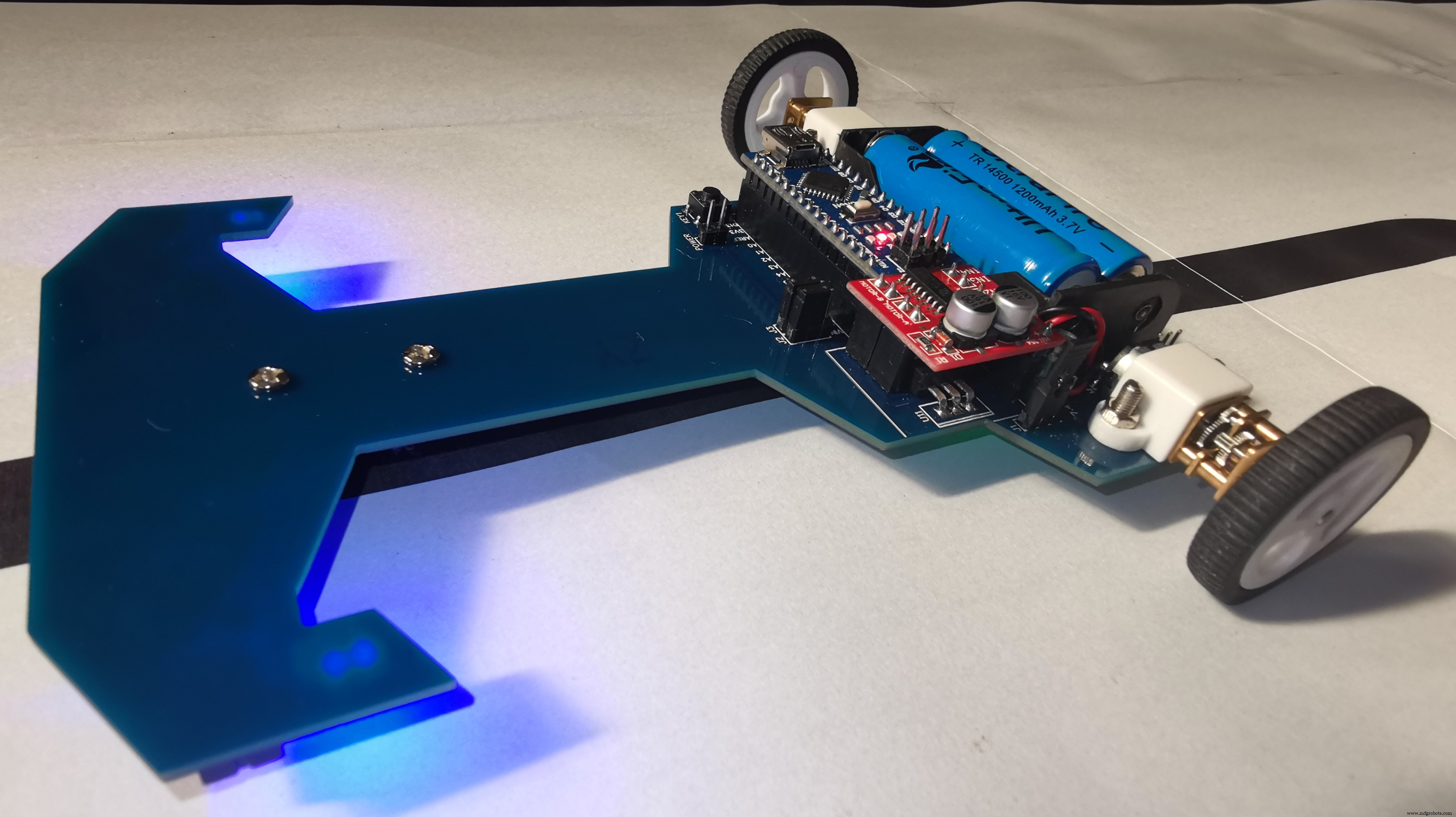
95% 실장된 회로의 최종 테스트는 다음 비디오에 나와 있습니다. 최대 소비량이 200mA인 마지막 암페어 테스트입니다.
이것은 JLCPCB에서 제조할 준비가 된 로봇 인쇄 회로의 최신 버전입니다.
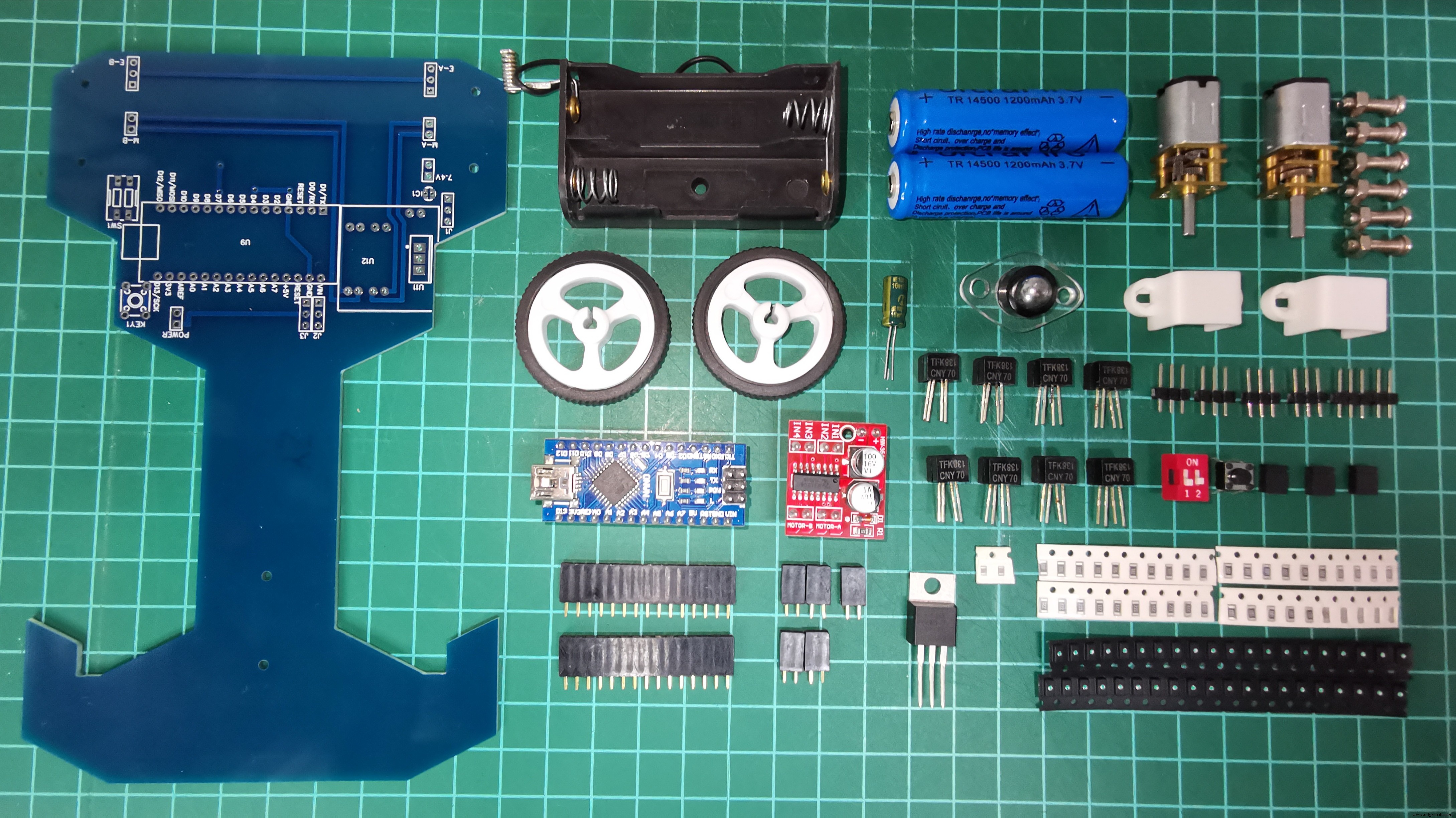
언박싱입니다.
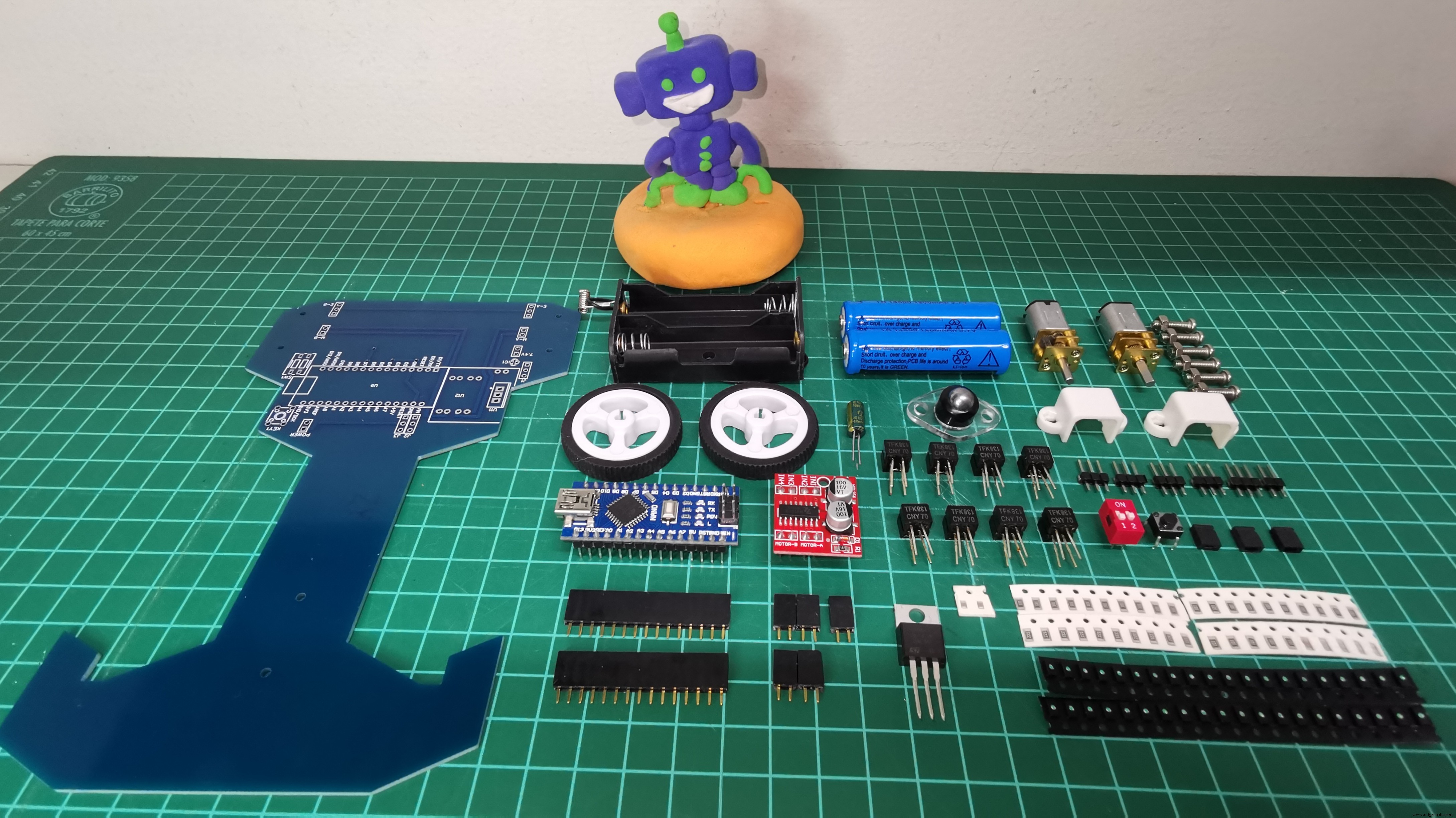

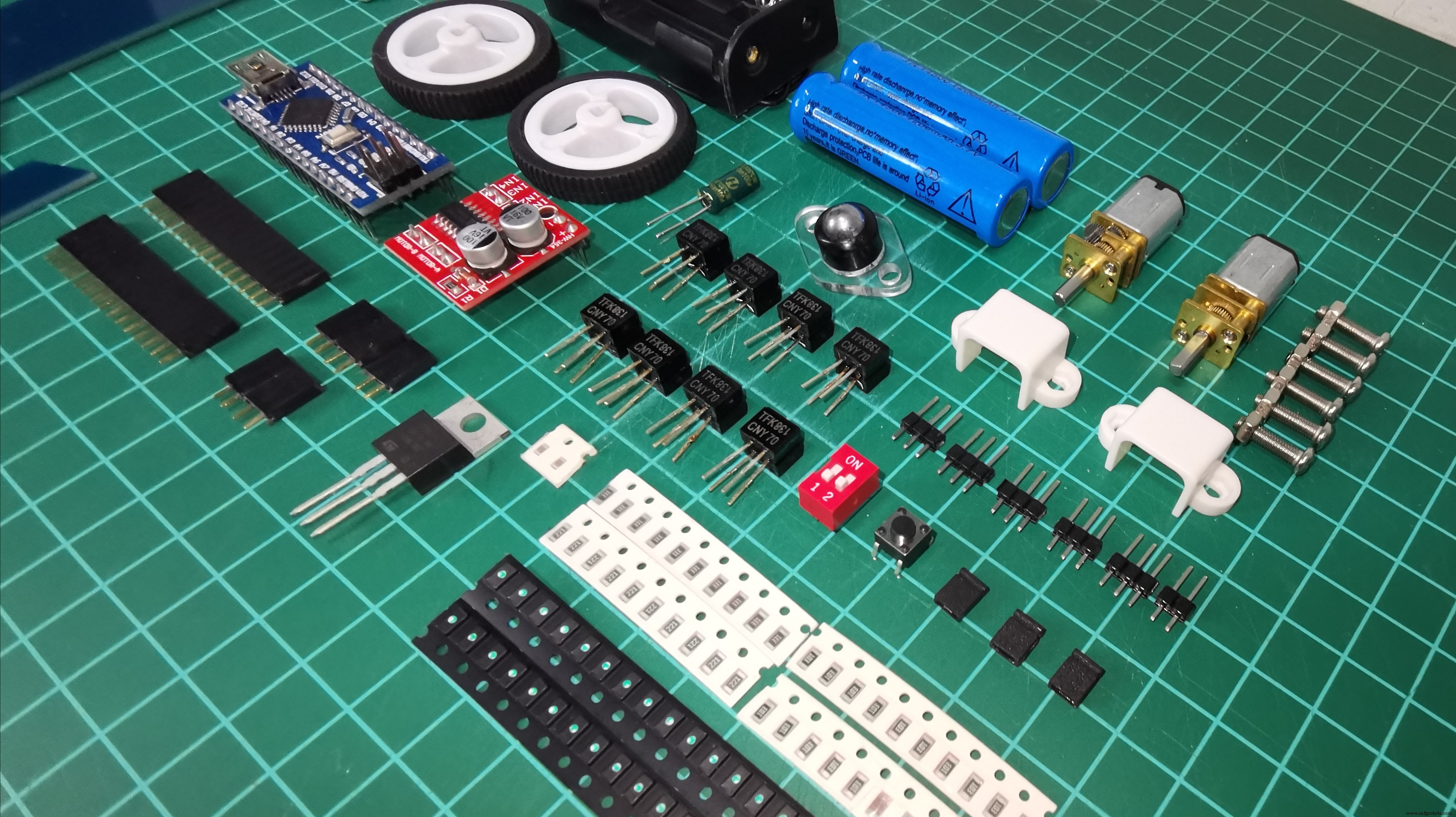
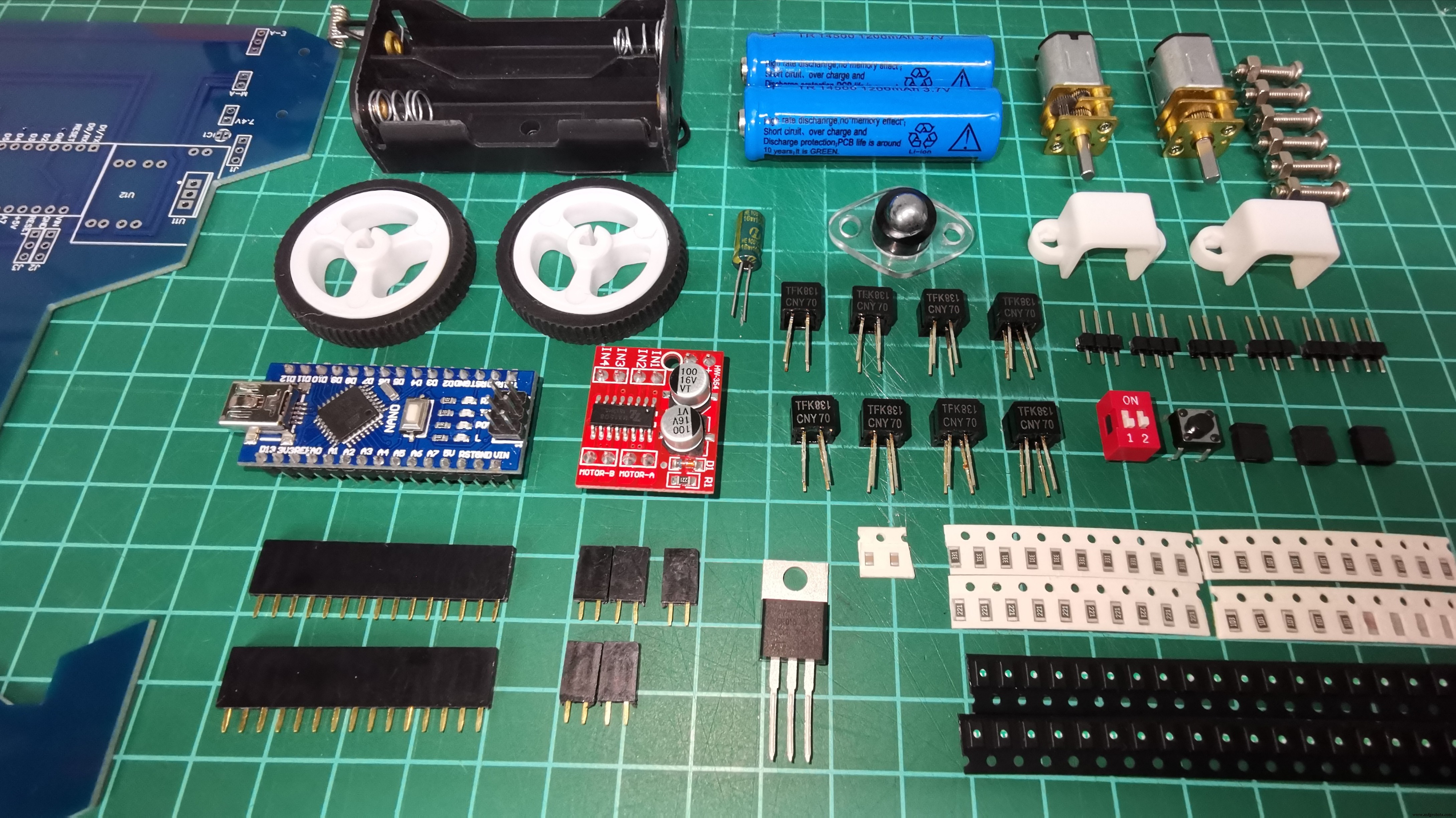



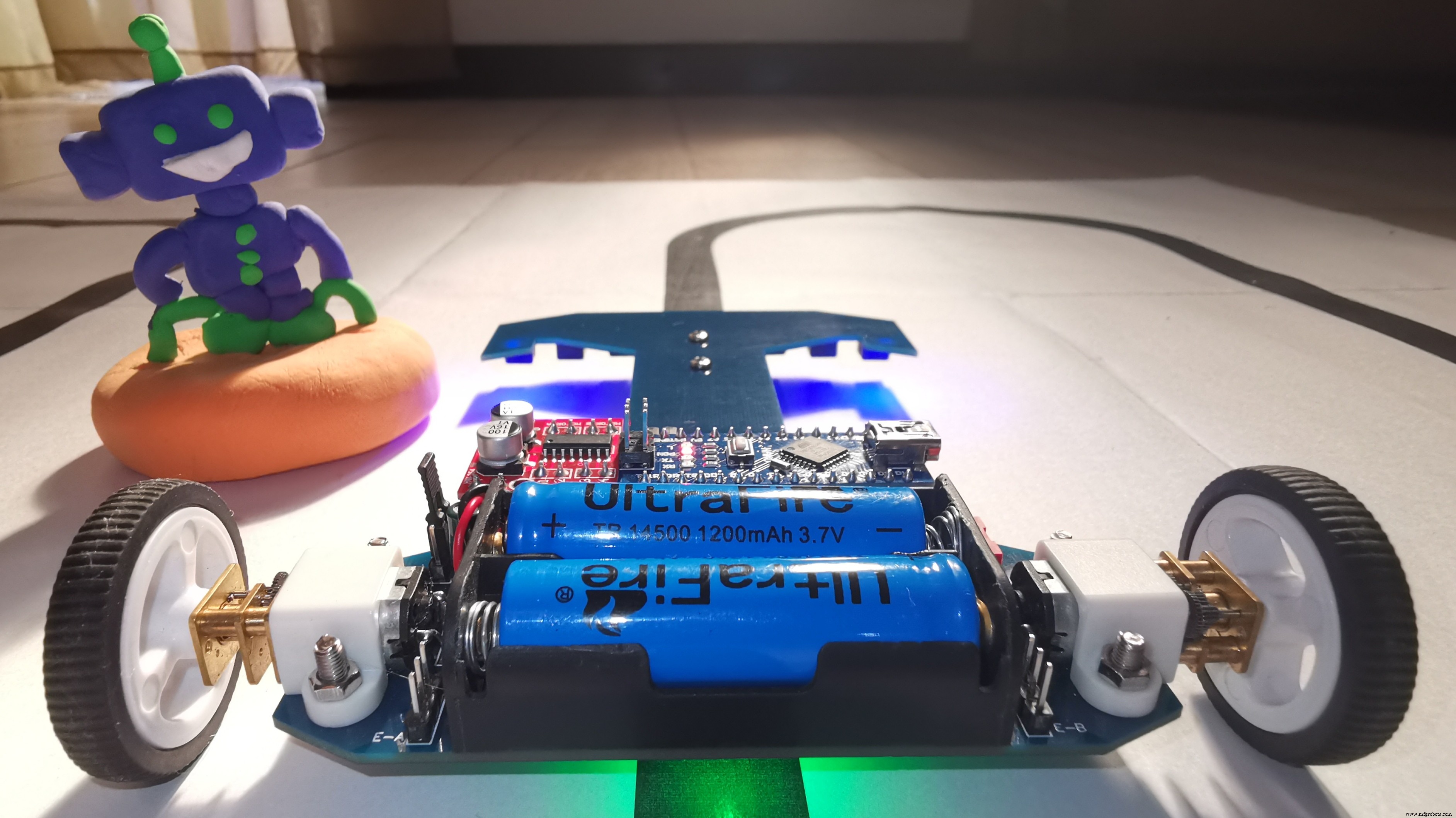
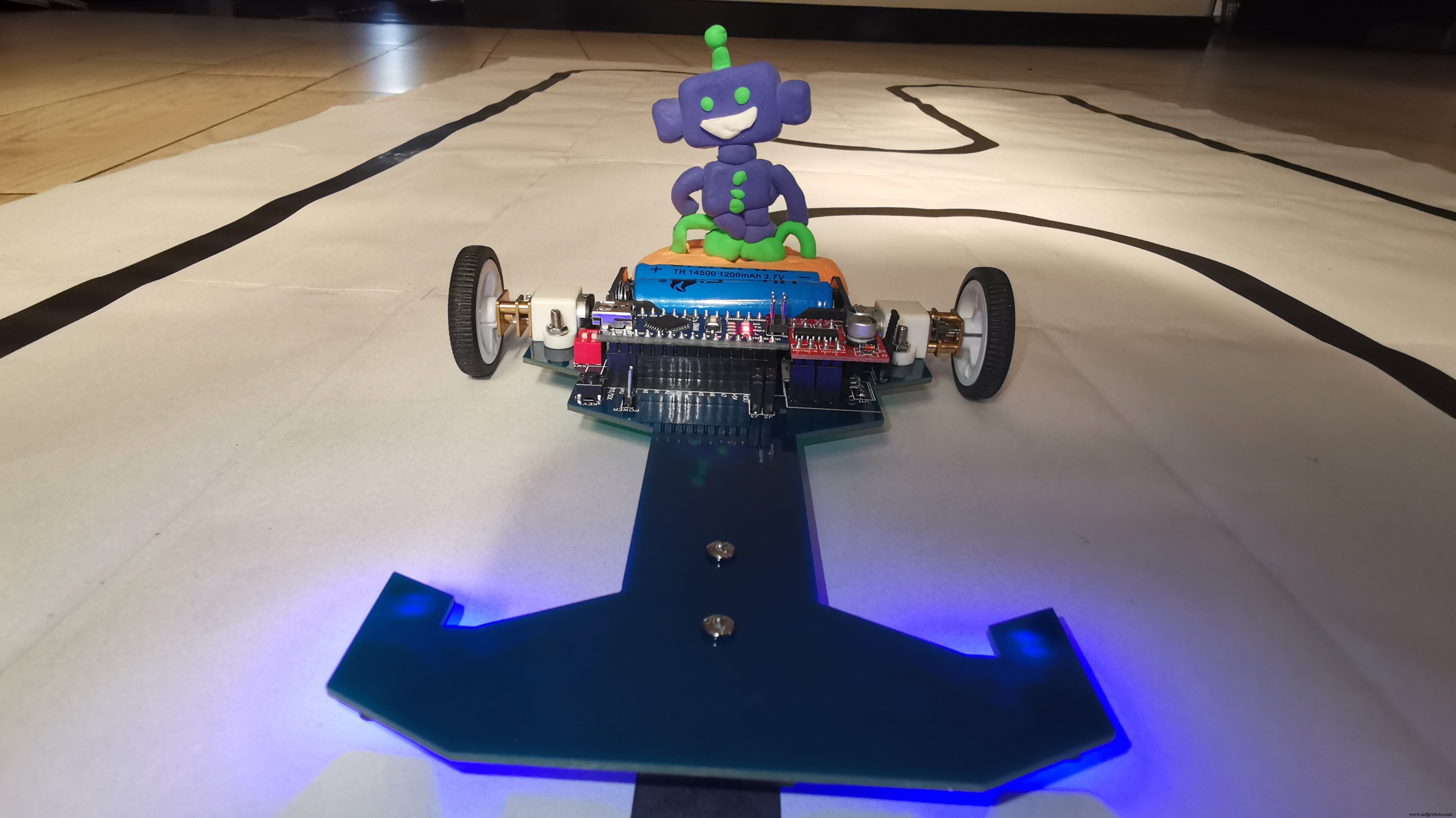
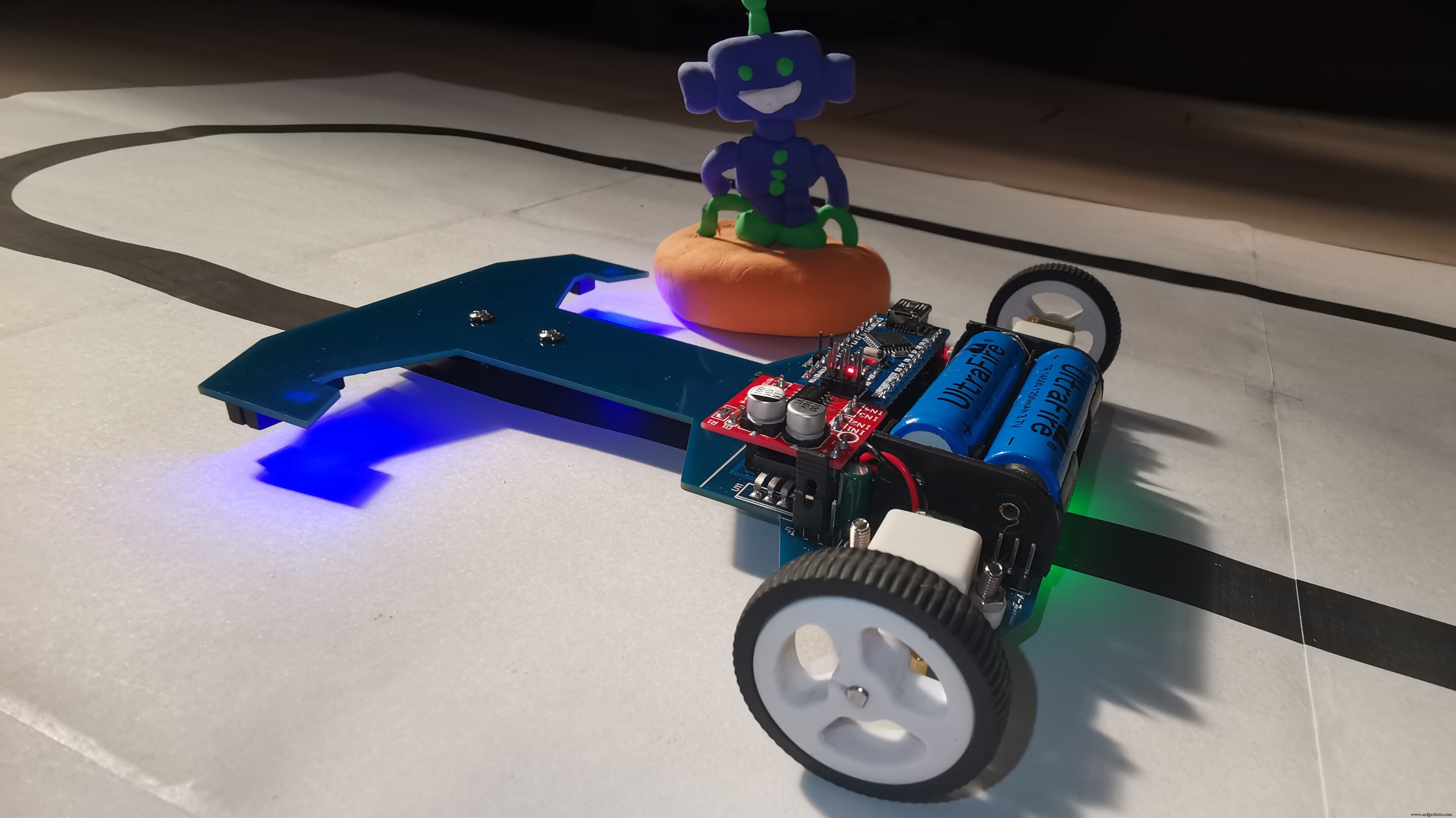
마지막 스트레치에서 이미 전체 조각이 있는 상태에서 첫 번째 Speed Follower Robot의 조립품을 보여줍니다.
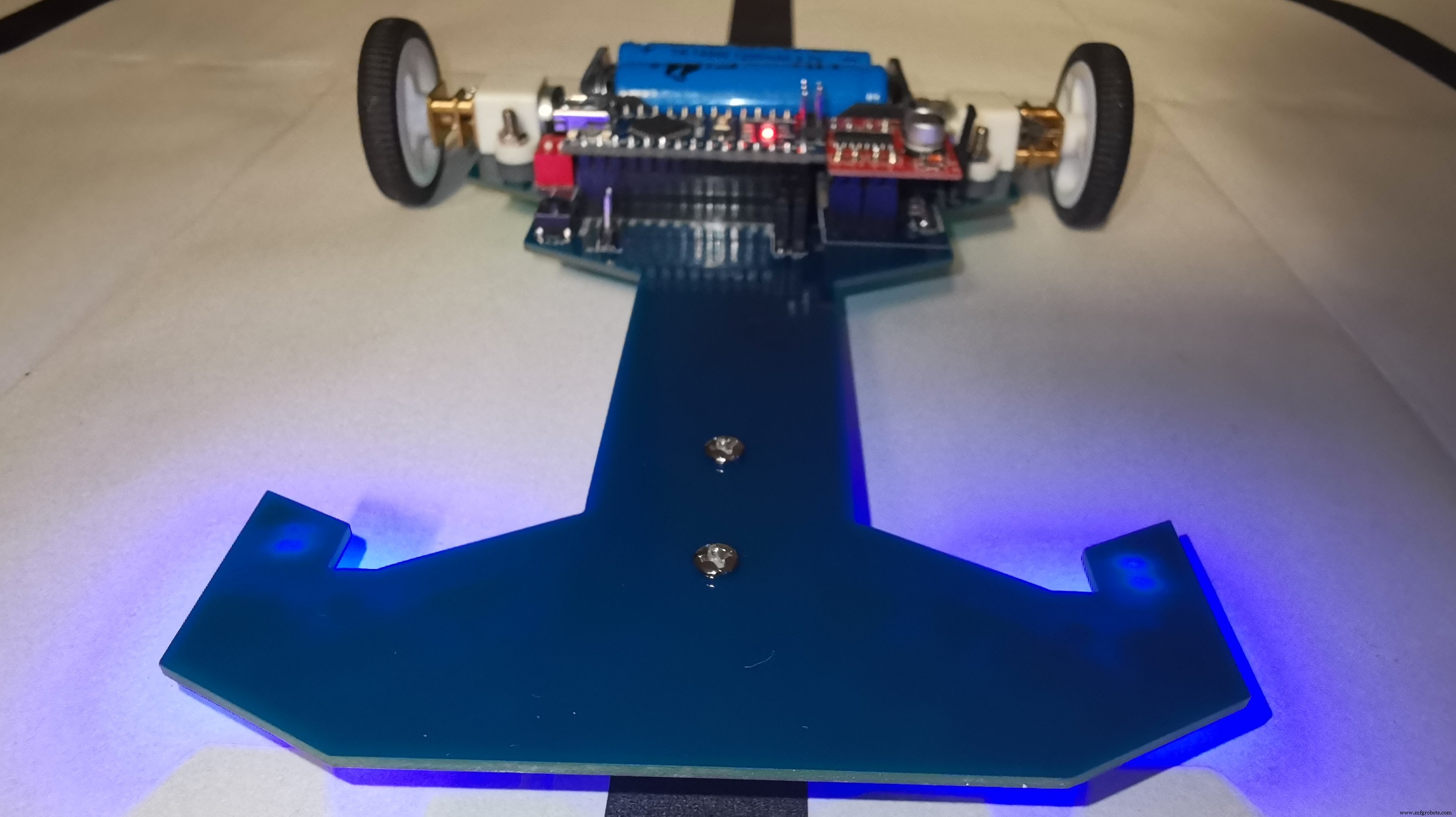
마지막으로 많은 노력을 기울여 완성된 프로토타입을 이미 가지고 있습니다. 코드를 로드하는 방법(코드 로드 모드), 센서를 테스트하는 방법, 물론 트랙에서 테스트하는 방법을 보여줍니다. 작업에 매우 만족한 테스트 코드는 코드를 매우 잘 제어합니다. 저는 PID(전체) 알고리즘을 사용하여 수정을 매끄럽게 하고 선의 과정을 되찾았습니다. 모든 것이 개선될 수 있으므로 더 효율적인 버전을 만들기 위해 계속 코드를 사용하겠습니다.


이를 보완하기 위해 나는 Webbots 애플리케이션에서 이 로봇의 시뮬레이션을 수행했습니다. 아직 개선 단계에 있지만 가상 환경에서 로봇을 제어하기 위한 기계적 및 논리적 테스트(코드)를 수행하는 방법을 감상하고 물리적으로 구축된 로봇의 작동을 이해하는 데 도움이 되는 방법을 이해할 수 있도록 이 비디오를 공유합니다.
제조공정
자, 모든 작업을 완료했습니다. 귀하는 RobotWorx와 같은 로봇 통합업체와 협력하여 시설에 맞는 완벽한 로봇 시스템 또는 작업 셀을 마련했습니다. 로봇의 작동 방식을 계획하고 가상 모델을 통해 버그를 해결했습니다. 이제 로봇 또는 작업 셀이 RobotWorx에 의해 구축되어 귀하의 시설에 있습니다. 하지만 이 자동화를 직장에 어떻게 설치하시겠습니까? 자동화된 제품을 설치하기 위한 첫 번째 단계 중 하나는 구매에 놀란 후 로봇에서 플라스틱을 제거하는 것입니다. 이것은 명백한 단계처럼 보일 수 있지만 참고할 필요가 있습니다. 또
속도는 아마도 제조업체가 시설에 대한 로봇 통합을 연구할 때 찾는 가장 중요한 것 중 하나일 것입니다. 그렇기 때문에 로봇 산업의 최고 기업인 Fanuc Robotics는 R1000iA/80H와 같은 로봇을 만들었습니다. R1000iA/80H는 소형이지만 제조업체가 생산성을 향상할 수 있도록 고속으로 이동할 수 있는 로봇입니다. Fanuc의 R-1000iA/80H와 같은 고속 로봇은 매우 다양한 종류의 애플리케이션을 수행할 수 있기 때문에 제조업체에 필수적입니다. 즉, 다양한 영역에서 라인의 기능을 개선할 수 있습니다. R1000