

제조공정

산업 제조
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 |
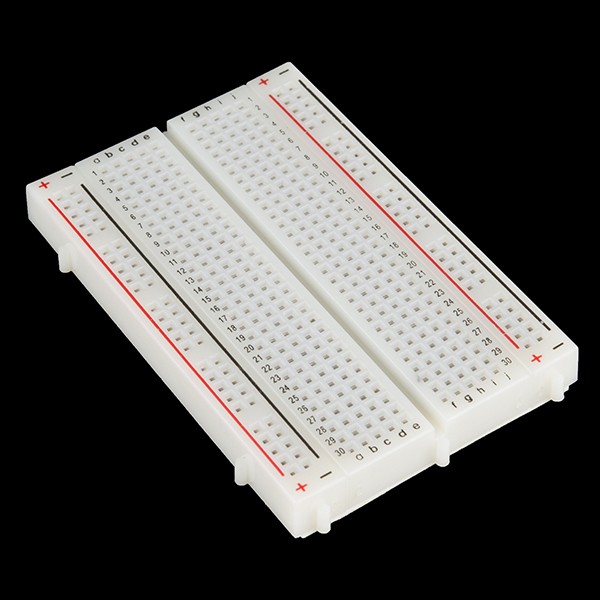
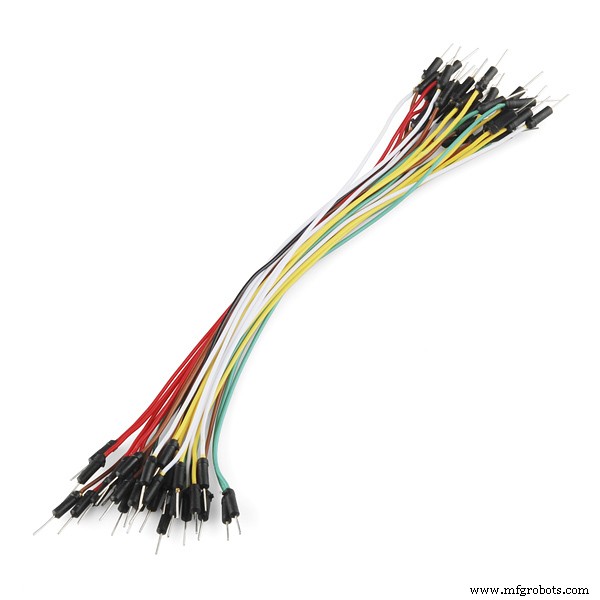
필요한 하드웨어:
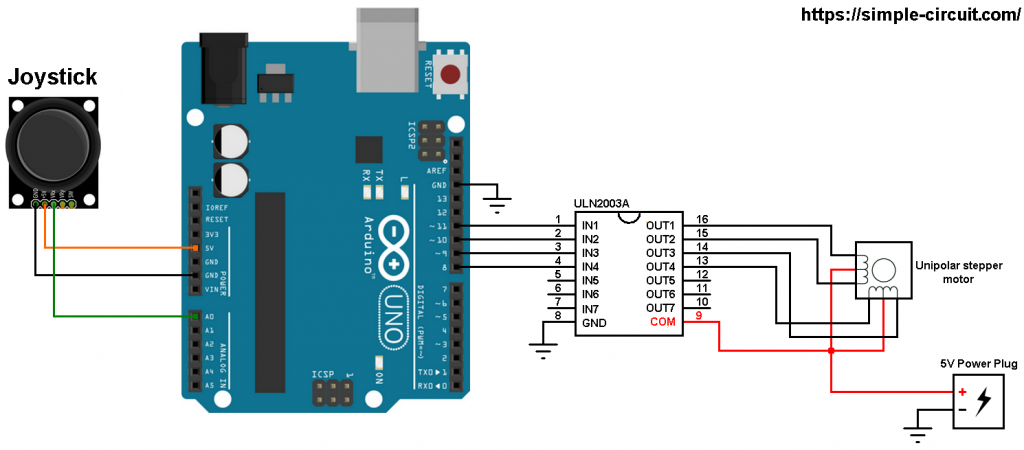
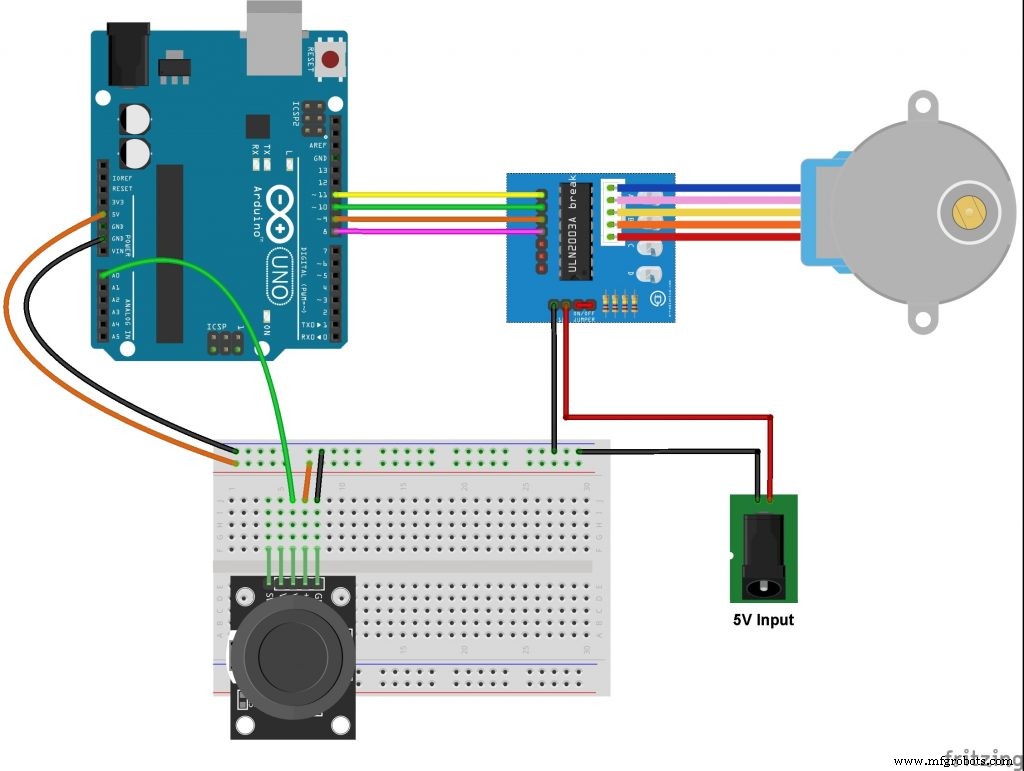
<울>Arduino 및 조이스틱 회로를 사용한 스테퍼 모터 제어:프로젝트 회로 개략도는 아래에 나와 있습니다(접지된 모든 단자가 함께 연결됨).
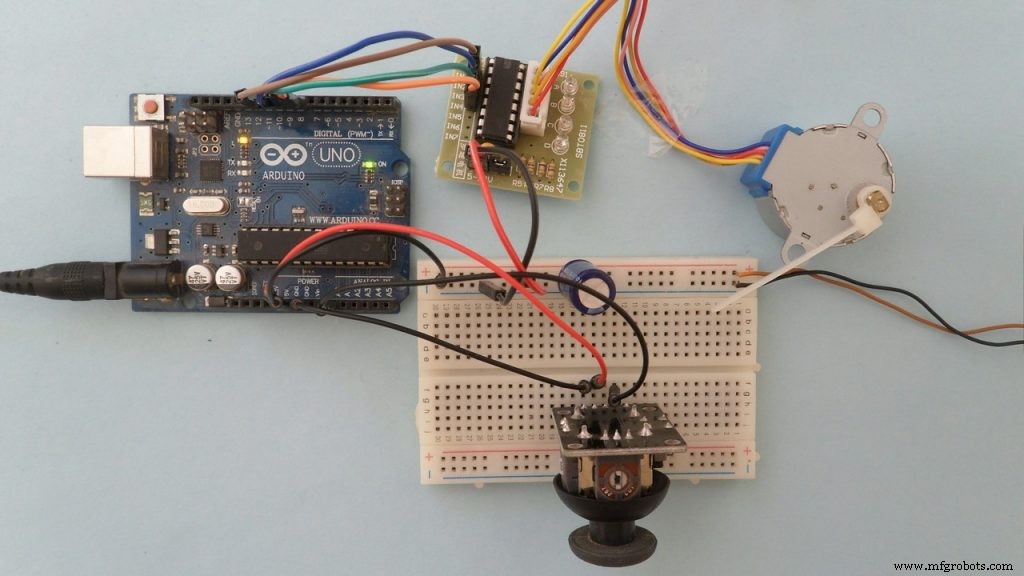
다음 이미지는 fritzing 회로를 보여줍니다.
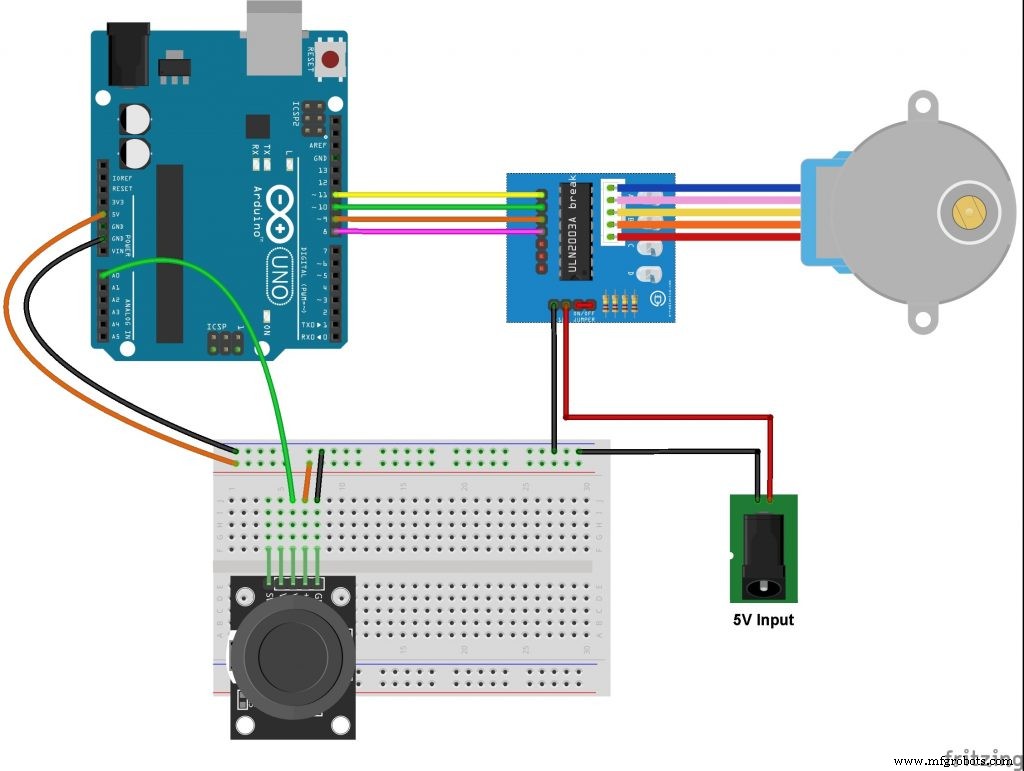
스테퍼 모터는 5V의 외부 전원이 공급되는 ULN2003A 보드에 연결됩니다. 이 보드의 제어 라인(IN1, IN2, IN3 및 IN4)은 다음과 같이 Arduino에 연결됩니다. IN1 - Arduino 핀 11IN2 - Arduino 핀 10IN3 - Arduino 핀 9IN4 - Arduino 핀 8
조이스틱 보드에는 5개의 핀이 있습니다:GND, +5V, VRX, VRY 및 SW 여기서:GND 및 +5V는 전원 공급 장치 핀VRX는 X축 전위차계 출력VRY는 Y축 전위차계 출력SW는 푸시 버튼 터미널(다른 터미널 GND에 연결). X축 전위차계(VRX)의 출력은 Arduino 아날로그 핀 A0에 연결되고 Y축 전위차계 출력(VRY)도 사용할 수 있습니다. 이 예에서는 스위치 핀(SW)을 사용하지 않습니다. X축과 Y축 전위차계를 사용하여 두 개의 스테퍼 모터를 독립적으로 제어할 수 있습니다.
"그래서 얘들아 만약 당신 좋아요 프로젝트이니 팔로우와 좋아요 잊지 마세요."
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">//이 프로젝트는 BEASTIDREES62에서 제작했습니다. 스테퍼 모터 라이브러리#include// 회전당 단계 수 정의#define STEPS 32 // 스테퍼 모터 제어 핀 정의#define IN1 11#define IN2 10#define IN3 9#define IN4 8 // 스테퍼 라이브러리 초기화Stepper 스테퍼(단계, IN4, IN2, IN3, IN1); // 조이스틱 포트 출력은 Arduino A0#define 조이스틱 A0에 연결됩니다. void setup(){ } void loop(){ // 전위차계에서 아날로그 값을 읽습니다. int val =analogRead(joystick); // 조이스틱이 중간에 있으면 ===> 모터를 멈춥니다. if( (val> 500) &&(val <523) ) { digitalWrite(IN1, LOW); 디지털 쓰기(IN2, LOW); 디지털 쓰기(IN3, LOW); 디지털 쓰기(IN4, LOW); } else { // 모터를 첫 번째 방향으로 이동 while (val>=523) { // 5와 500rpm 사이의 속도를 매핑합니다. int speed_ =map(val, 523, 1023, 5, 500); // 모터 속도 설정 stepper.setSpeed(speed_); // 모터 이동(1단계) stepper.step(1); val =analogRead(조이스틱); } // 모터를 다른 방향으로 움직입니다. while (val <=500) { // 5에서 500rpm 사이의 속도를 매핑합니다. int speed_ =map(val, 500, 0, 5, 500); // 모터 속도 설정 stepper.setSpeed(speed_); // 모터 이동(1단계) stepper.step(-1); val =analogRead(조이스틱); } } }
제조공정
이 Arduino 튜토리얼에서는 A4988 스테퍼 드라이버를 사용하여 스테퍼 모터를 제어하는 방법을 배웁니다. 다음 동영상을 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 A4988은 쉬운 작동을 위해 내장된 변환기가 있는 바이폴라 스테퍼 모터를 제어하기 위한 마이크로스테핑 드라이버입니다. 이것은 컨트롤러에서 단 2개의 핀으로 스테퍼 모터를 제어할 수 있음을 의미합니다. 하나는 회전 방향을 제어하고 다른 하나는 단계를 제어하기 위한 것입니다. Driver는 풀스텝, 하프스텝, 쿼터스텝, 8스텝, 16스텝의
스테퍼 모터는 정확한 위치 제어를 달성하기 위해 전체 회전을 동일한 단계로 나눕니다. 오늘의 토론 주제는 28BYJ-48 단극 8비트 4상 영구 자석 구동 스테퍼 모터입니다. 프로젝트를 진행 중이고 사용하기 쉬운 모터가 필요하다고 가정해 보겠습니다. 28BYJ-48이 적합합니다. 또한 Arduino와 페어링할 수 있는 가장 저렴한 스테퍼 모터 중 하나입니다. 이 스테퍼 모터의 작동을 더 잘 이해하려면 계속 읽으십시오. 28BYJ-48이란 무엇입니까? 그림 1:28BYJ-48 스테퍼 모터 28BYJ-48은 5개의 단자