

산업용 로봇

산업 제조
FANUC 로봇이 선택한 애플리케이션에 가장 적합한 선택이라고 결정하셨습니다.
하지만 FANUC를 프로그래밍하는 가장 좋은 방법은 무엇입니까?
진짜 선택의 여지가 있습니까, 아니면 제조업체에서 제공하는 기본 옵션을 사용해야 합니까?
독특한 밝은 노란색 로봇을 갖춘 일본 로봇 제조업체 FANUC는 비즈니스에 로봇 자동화를 추가하려는 사람들에게 인기 있는 선택입니다.
선택한 로봇을 최대한 활용하기를 원합니다. 즉, 최고의 프로그래밍 방법을 선택해야 합니다.
FANUC에서 제공하는 기본 프로그래밍 방법을 사용해야 한다고 가정할 수 있습니다. 이것은 일반적인 가정입니다. 많은 사람들이 FANUC 로봇을 프로그래밍하기 위해 기본 방법을 사용한다는 것은 확실히 사실입니다.
FANUC 로봇으로 프로그래밍하는 기본 방법에는 2가지가 있습니다.
다음은 다음과 같습니다.
귀하 또는 귀하의 팀 구성원 중 누군가가 Karel 프로그래밍 경험이 있거나 FANUC 티치 펜던트를 사용한 경험이 있는 경우 이러한 프로그래밍 방법이 실행 가능한 옵션이 될 수 있습니다.

그러나 로봇을 프로그래밍하는 기본 방법은 필요 이상으로 사용하기가 훨씬 더 어렵습니다. 그들은 또한 다른 프로그래밍 방법과 함께 제공되는 강력한 기능을 놓치고 있습니다.
기본 옵션만 선택하면 보다 직관적이고 강력한 프로그래밍을 놓칠 수 있습니다.
로봇을 프로그래밍하는 가장 좋은 방법은 기존 기술을 최대한 활용하는 것입니다. 로봇에서 필요한 모든 기능에 액세스할 수도 있습니다.
다음은 FANUC 로봇을 프로그래밍할 수 있는 5가지 훌륭한 방법입니다. 귀하의 기술과 로봇의 능력을 최대한 활용하는 방법:
물론 로봇 프로그래밍의 기본 방법은 FANUC 프로그래밍 전문가들이 광범위하게 사용합니다. 로봇과 함께 제공되는 티치 펜던트를 사용하면 로봇의 핵심 기능의 여러 측면에 액세스할 수 있습니다.
펜던트 프로그래밍을 가르치려면 많은 작업이 필요합니다. 버튼 누르기, 메뉴 탐색, 로봇을 눈으로 원하는 위치로 살짝 밀기("조깅"으로 알려진 기술). 적당한 크기와 복잡성의 프로그램을 만드는 것은 긴 과정입니다. 나중에 프로그램을 변경하는 것도 마찬가지로 힘든 과정입니다.
Teach 펜던트 프로그래밍은 오른손에서 강력할 수 있습니다. 그러나 가장 큰 문제는 온라인 프로그래밍 방식이라는 점에서 오랜 시간이 걸린다는 점이다. 즉, 로봇을 재프로그래밍하려면 작업을 중단해야 하므로 생산성이 저하됩니다.
대신 FANUC 로봇으로 오프라인 프로그래밍을 사용하여 온라인 프로그래밍의 부정적인 영향을 줄일 수 있습니다. 이것은 컴퓨터에서 프로그램을 생성한다는 것을 의미합니다. 완료되면 로봇 컨트롤러에 다운로드할 수 있습니다.
오프라인 프로그래밍의 가장 기본적인 형태는 텍스트 편집기에서 프로그램을 코딩하는 것입니다. FANUC의 Karel 프로그래밍 언어를 사용합니다. 그러나 이를 위해서는 FANUC 로봇 프로그래밍 경험이 많이 필요합니다. 진행하면서 프로그램을 디버그할 수 있는 방법이 없습니다. 결과적으로 실제 로봇의 디버깅 단계가 더 길어지고 온라인 프로그래밍과 유사한 지연이 발생합니다.
FANUC 로봇을 오프라인으로 프로그래밍하는 더 좋은 방법은 전용 오프라인 프로그래밍 소프트웨어를 사용하는 것입니다. 이를 통해 로봇의 프로그램을 만들고 디버그할 수 있습니다. 로봇을 생산 중단하기 전에 그래픽 시뮬레이터를 사용하여 이 작업을 수행할 수 있습니다.
물론 일부 오프라인 프로그래밍 도구는 다른 도구보다 사용하기 쉽습니다. 예를 들어 RoboDK는 로봇 경험이 없어도 누구나 사용할 수 있는 오프라인 프로그래밍 및 시뮬레이션 소프트웨어입니다.
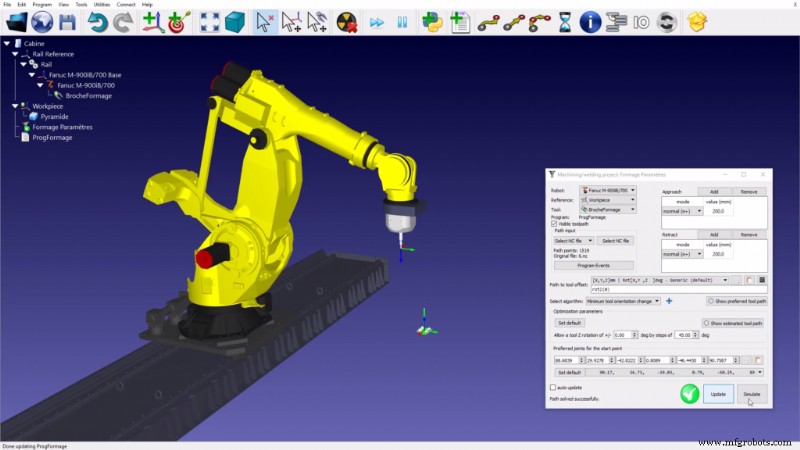
RoboDK는 직관적인 그래픽 인터페이스를 제공하고 로봇 프로그래밍에 추가 기능을 제공합니다. 다음과 같은 기존 방법에서는 사용할 수 없습니다. 전용 가공 마법사, 3D 프린팅 기능 등.
숙련된 프로그래머이지만 FANUC 또는 로봇 공학에 대한 구체적인 경험이 많지 않은 경우 좋아하는 언어를 사용하여 로봇을 프로그래밍할 수 있는지 궁금할 것입니다.
과거에는 로봇 컨트롤러와 인터페이스하기 위해 래퍼 라이브러리와 네트워크 통신 라이브러리를 생성해야 했기 때문에 이것이 어려웠을 것입니다. 하지만 이제는 가능하고 쉽습니다.
RoboDK를 사용하면 여러 고급 프로그래밍 언어 중 하나를 사용하여 FANUC를 프로그래밍할 수 있습니다. 로봇에 다운로드하기 전에 시뮬레이터에서 프로그램을 오프라인으로 테스트할 수 있습니다.
이전의 네 가지 방법은 모두 기하학 및 로봇 프로그래밍에 대한 최소한의 이해를 포함합니다. 그래픽 시뮬레이션에서 로봇을 드래그할 수 있는 그래픽 오프라인 소프트웨어를 사용하는 경우에도 마찬가지입니다. 시뮬레이션 환경이 실제 환경과 어떤 관련이 있는지 여전히 생각해야 합니다.
이 모든 것을 말하면서도 다른 모든 것보다 훨씬 사용하기 쉬운 FANUC 로봇을 프로그래밍하는 또 하나의 전문적인 방법이 있습니다.
RoboDK TwinTrack을 사용하면 휴대용 프로브를 사용하여 로봇의 원하는 동작을 추적하여 간단하게 프로그램을 생성할 수 있습니다. 그런 다음 로봇은 정확한 동작을 재생합니다. TwinTrack은 오프라인 프로그래밍과도 호환되므로 로봇 생산에 영향을 미칠 필요가 없습니다.
그렇다면 다음 중 어떤 프로그래밍 방법이 가장 적합할까요?
앞서 언급했듯이 최고의 프로그래밍 방법은 프로그래머로서의 기존 기술을 최대한 활용하고 로봇의 기능을 최대한 활용할 수 있도록 하는 것입니다.
물론, FANUC 로봇과 함께 제공되는 기본 방법은 이러한 기준을 충족할 수 있습니다.
이 문서에 나열된 다른 옵션을 사용하면 더 강력한 기능에 더 쉽게 액세스할 수 있습니다. 로봇의 티치 펜던트에 있는 버튼을 끝없이 누르거나 Karel 프로그래밍 언어로 자신을 묶을 필요가 없습니다.
RoboDK로 FANUC 프로그래밍을 시도하고 싶다면 RoboDK 다운로드 페이지에서 평가판을 무료로 받을 수 있습니다.
RoboDK로 FANUC 로봇을 프로그래밍하는 방법에 대한 자세한 지침은 전용 문서 페이지를 확인하세요.
FANUC 로봇을 프로그래밍하는 데 어떤 어려움이 있습니까? 아래 댓글로 알려주거나 LinkedIn, Twitter, Facebook, Instagram 또는 RoboDK 포럼에서 토론에 참여하세요.
산업용 로봇
Fanuc 서브 프로그래밍 Fanuc cnc 제어는 메인 디렉토리에 저장된 다른 파트 프로그램에 액세스할 수 있는 기능을 제공합니다. 하위 프로그램 호출을 위한 cnc 프로그램 예제는 Fanuc G76 스레딩 사이클을 사용한 다중 시작 스레드 읽기 하위 프로그램 호출 하위 프로그램은 M98 명령 뒤에 문자 P가 붙은 하위 프로그램 번호를 사용하여 호출합니다. N10 M98 P1004 위의 cnc 프로그램 라인에서 하위 프로그램 1004가 호출되며 제어 메모리에 O1004로 저장됩니다. 하위 프로그램 종료 프로그램을 계속
제출자:Brian 그림/이미지 CNC 프로그램 O0001 ;SUB ProgramG0 T1212 M5X0. Z30.G1 G98 Z-80. F3000M8 ;Coolant ON, Grippex clampG4 U1. ;DwellM69 ;Chuck unclampG4 U0.1 ;DwellG1 Z-1. ;Pulling-out the bar to a specific z-extentM68 ;Chuck clampM9 ;Coolant OFF, Grippex unclampG0 G99 Z... ;Leave the barX...M99%