

산업용 로봇

산업 제조
로봇 프로그래밍을 시작할 때 알아두면 가장 유용한 기본 속성은 무엇인가요?
로봇 공학의 세계를 처음 접하거나 프로그래밍 기술을 향상시키려는 경우에 알아두면 좋은 최고의 로봇 프로그래밍 기본 사항은 다음과 같습니다.
로봇 프로그래밍을 시작하려면 로봇 학위가 필요하다고 느낄 때가 있습니다. 산업용 로봇 프로그래밍에 대한 기존의 접근 방식은 새로운 로봇 프로그래머가 이해하기 어려워 보입니다.
그러나 로봇 공학의 기본 사항과 우수한 로봇 프로그래밍 소프트웨어만 있으면 쉽고 빠르게 시작할 수 있습니다.
다음은 11가지 가장 유용한 로봇 프로그래밍 기본 사항입니다.
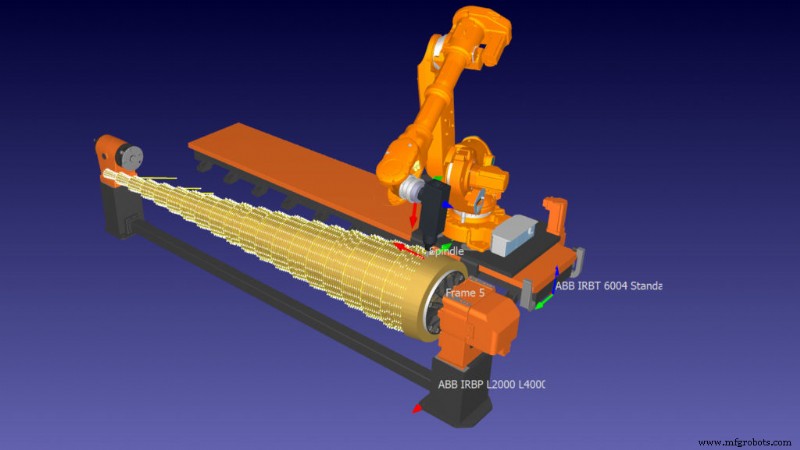
로봇 프로그래밍 방법을 배우기 전에 산업용 로봇의 기본 부품을 이해하는 것이 도움이 됩니다. 그렇게 하면 최소한 프로그래밍할 물리적 기계에 익숙해질 수 있습니다.
예를 들어, 6 DoF 산업용 로봇의 가장 기본적인 부품은 다음과 같습니다.
로봇의 종류에 따라 구성품이 조금씩 다릅니다.
저는 이미 로봇의 핵심 개념인 자유도(DoF)를 소개했습니다.
로봇의 DoF는 로봇이 움직일 수 있는 독립 축의 수를 지정합니다. 예를 들어 6 DoF 조작기 암에는 6개의 독립적으로 제어 가능한 축이 있습니다. 일부 DoF는 "회전"(즉, 점을 중심으로 회전)하고 일부는 "선형"(즉, 선을 따라 이동)입니다. 프로그래밍하기 전에 로봇의 DoF에 익숙해지면 도움이 됩니다.
로봇의 "비즈니스 엔드"(즉, 작업을 수행하는 부품)를 "엔드 이펙터"라고 합니다. 프로그래밍할 때 일반적으로 로봇의 엔드 이펙터를 특정 위치로 보내는 데 가장 관심이 많습니다.
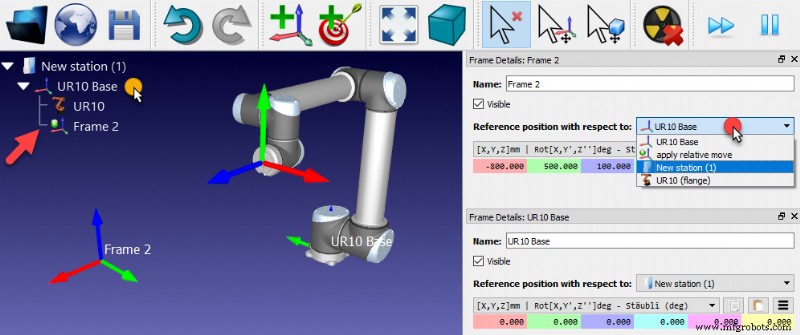
로봇을 움직이기 위해서는 로봇의 각 DoF의 원하는 위치와 함께 지시를 보내야 합니다. RoboDK와 같은 소프트웨어를 사용하는 경우 특정 관절 위치를 보내는 대신 원하는 엔드 이펙터 위치를 직접 프로그래밍할 수 있습니다.
엔드 이펙터가 어디로 가야 하는지 알려주도록 어떻게 프로그래밍합니까?
로봇의 엔드 이펙터(또는 프로그래밍한 다른 위치)의 위치와 방향이 결합되어 "포즈"를 형성합니다. 프로그램에서 로봇이 이동할 위치의 포즈를 지정해야 합니다. 프로그래밍에서 포즈를 지정하는 가장 일반적인 방법은 오일러 각도를 사용하는 것입니다.
자세한 내용은 Robot Euler Angles:Essential Primer 문서를 참조하십시오.
우리는 로봇을 프로그래밍할 때 엔드 이펙터 자세에 가장 관심이 많기 때문에 종종 도구 중심점이라는 용어를 도구의 작동 중심을 지칭하는 데 사용합니다.
다음은 다양한 엔드 이펙터에 대한 몇 가지 예입니다.
프로그래머는 로봇의 TCP를 배치하는 것이 가장 적합한 위치를 선택합니다.
로봇의 가장 어려운 측면 중 하나는 운동학입니다. 이것은 로봇의 기하학적 배열을 의미합니다. 운동학은 다소 큰 방정식이나 알고리즘으로 표현됩니다.
순운동학 방정식은 "로봇의 관절을 특정 위치로 설정하면 TCP는 어디에서 끝나나요?"라는 질문에 답합니다.
Inverse Kinematic 알고리즘은 "TCP가 이 포즈에서 끝나게 하려면 관절을 어떤 위치로 설정해야 합니까?"라는 반대 질문에 답합니다.
좋은 로봇 프로그래밍 소프트웨어를 사용하면 자신만의 운동학을 공식화할 필요가 없지만 기본 개념을 이해하는 데 도움이 될 수 있습니다.
운동 방정식은 순수한 기하학과 수학을 사용하여 로봇을 설명합니다. 그러나 로봇은 물리적 기계입니다. 물리적 로봇은 형상이 허용하는 모든 위치에 도달할 수 없는 경우가 많습니다.
로봇 관절의 움직임을 물리적으로 가능한 위치로만 제한하기 위해 프로그래밍에 관절 제한을 도입합니다. 그들은 프로그램에 "이 관절은 이 특정 각도 이상으로 움직일 수 없습니다."라고 말합니다.
로봇을 프로그래밍할 때 로봇이 만들 수 있는 다양한 유형의 움직임이 있습니다.
기본 3가지 동작은 다음과 같습니다.
로봇 제조업체에서 제공하는 (일반적으로 복잡한) 프로그래밍 언어로 "손을 더럽히는 것"을 포함하여 로봇을 프로그래밍하는 방법에는 여러 가지가 있습니다.
시뮬레이션 및 오프라인 프로그래밍은 더 쉬운 프로그래밍 방법을 제공합니다. 물리적 로봇을 직접 프로그래밍하는 대신 직관적인 명령을 사용하여 로봇의 시뮬레이션 모델을 프로그래밍합니다. 그러면 소프트웨어가 프로그램을 실제 로봇이 이해할 수 있는 코드로 변환합니다.
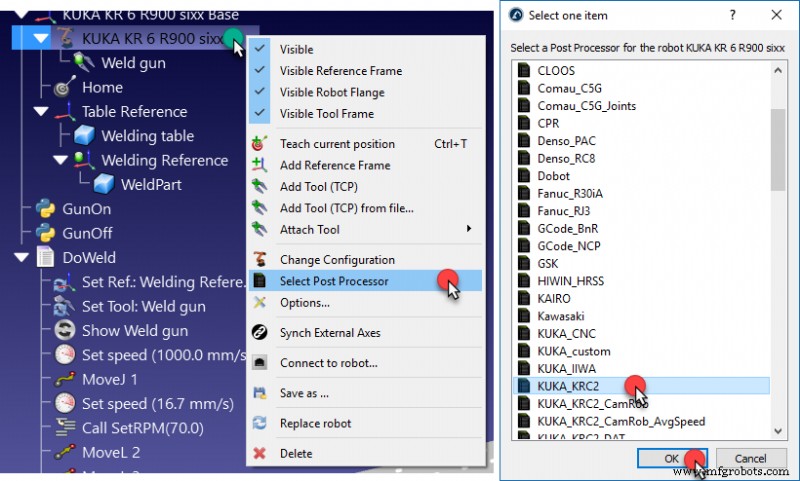
로봇 프로그램을 변환하는 오프라인 프로그래밍 소프트웨어의 일부를 후처리기라고 합니다. 프로그래밍 소프트웨어에는 로봇 제조업체마다 다른 포스트 프로세서가 있으며 때로는 둘 이상이 있습니다.
로봇 후처리기:알아야 할 모든 것에서 후처리기에 대해 자세히 알아볼 수 있습니다.
어떤 프로그래밍 방법을 사용하든 중요한 기본 기술은 디버깅입니다. 프로덕션 환경에서 로봇을 실행하도록 설정하기 전에 항상 프로그램을 디버그하여 의도한 대로 작동하는지 확인해야 합니다.
오프라인 프로그래밍은 프로그램을 실제 로봇 자체에 다운로드하기 전에 로봇의 시뮬레이션 모델을 프로그래밍하기 때문에 추가 디버깅 단계를 제공하여 오류 가능성을 줄입니다.
로봇 프로그래밍을 즉시 시작하려면 여기에서 RoboDK 무료 평가판을 다운로드할 수 있습니다.
로봇 프로그래밍의 어떤 기본 측면에서 도움을 받고 싶습니까? 아래 댓글로 알려주거나 LinkedIn, Twitter, Facebook, Instagram 또는 RoboDK 포럼에서 토론에 참여하세요.
산업용 로봇
견고한 Fanuc M-900iA 로봇 시리즈는 가장 열악한 제조 환경에서 거의 모든 작업을 처리할 수 있습니다. 이 로봇은 정밀하고 고속/높은 페이로드 작업, 사용자 친화적인 설정 및 최대의 안정성을 위해 설계되었습니다. M-900iA 시리즈는 6축, 모듈식 구조, 전기 서보 구동식 로봇 제품군으로 설치 공간이 작고 컨트롤러 크기가 작아 바닥 공간을 절약할 수 있습니다. 모든 축에는 RV 리듀서가 있고 손목에 모터가 없으며 케이블이 팔을 통해 연결됩니다. 여러 개의 부착 지점을 통해 통합이 더 쉬워지고 고정식 외부 암은 호스 및
생산 라인이 중장비 자재 취급 작업의 처리량을 늘릴 준비가 되었으면 Fanuc M-900iB 시리즈의 로봇 통합을 고려하십시오. 이 시리즈의 6축 전기 서보 구동 로봇은 높은 속도와 큰 가반하중을 제공하도록 세심하게 제작되었습니다. Fanuc M-900iB 산업용 로봇 시리즈는 사용 가능한 다양한 모델로 다양한 자재 취급 애플리케이션을 자동화할 수 있는 기능을 사용자에게 제공합니다. Fanuc M-900iB/280은 J3 암의 강성이 향상된 견고하고 정밀한 로봇으로 최고의 정밀도를 제공합니다. 이 모델은 라우팅, 절단, 디버링 및