

산업용 로봇

산업 제조
안전 장비는 로봇이 움직이는 동안 작업자를 보호하기 위한 모든 로봇 시스템 또는 워크셀의 필수 부분입니다. 펜싱, 아크 글레어 쉴드, 칸막이와 같은 물리적 장벽뿐만 아니라 라이트 커튼 및 영역 스캐너와 같은 보이지 않는 장벽 등 오늘날 작업자를 안전하게 지켜줄 다양한 안전 옵션이 시장에 나와 있습니다.

이것은 가장 일반적인 안전 옵션입니다. 울타리는 로봇 주변 영역을 차단하는 물리적 장벽을 제공하여 사람들이 작업 셀 또는 시스템의 설정된 주변을 볼 수 있도록 합니다. 이 케이지는 높이가 몇 피트이고 디자인은 애플리케이션과 보호해야 하는 영역의 크기에 따라 다릅니다.
펜싱은 작업 셀 또는 시스템 주변 외부로 파편이 튀는 것을 방지하기 위해 커튼으로 덮을 수도 있습니다. 일부 커튼은 파편으로부터 보호하고 다른 커튼은 아크 눈부심으로부터 보호합니다. 아크 용접 공정 중에 존재하는 밝은 빛은 장기간 관찰할 경우 눈 자극 또는 망막 손상을 유발할 수 있습니다. 용접 커튼은 선글라스와 유사한 방식으로 눈을 보호합니다. 윌슨 스펙트라 커튼과 같은 아크 글레어 커튼은 노란색, 주황색, 회색 및 갈색 음영으로 제공되며 일반적으로 작업 셀 펜싱의 3면에 고정됩니다. 이 안전 옵션은 아크 용접에서 나오는 빛을 흡수, 여과 및 산란시켜 눈부심을 줄이고 용접 작업장에 있는 모든 사람의 작업 환경을 개선합니다.
부분적으로 투명한 아크 글레어 쉴드와 달리 금속 디바이더는 아크 글레어의 영향으로부터 작업자의 눈을 보호하기 위해 다른 용량으로 작동합니다. 180도 인덱싱 테이블이 시스템 내부에 고정되면 테이블 중앙에 높은 수직 금속 칸막이가 고정되어 작업자의 로봇 작동을 차단합니다. 이는 아크 눈부심으로부터 눈을 보호할 뿐만 아니라 용접 스프레이도 보호합니다.
펜싱은 3면이 있는 경향이 있으며 한 영역은 부품 적재를 위해 열려 있습니다. 이 영역에는 라이트 커튼이나 영역 스캐너와 같은 다양한 로봇 안전 옵션 세트가 필요합니다.
라이트 커튼에는 송신기와 수신기가 서로 마주보게 정렬되어 있습니다. 라이트 커튼이 정렬되고 작동하면 영역 전체에 보이지 않는 빔을 보내고 로봇에게 작동해도 괜찮다는 신호를 보냅니다. 이 영역이 침범되면 라이트 커튼이 로봇에 정지하라는 신호를 보냅니다. 이것은 로봇과 라이트 커튼 사이의 펜스 회로가 끊어졌기 때문에 발생합니다. 펜스 회로가 끊어져도 티치 펜던트로 로봇을 계속 움직일 수 있습니다.
SICK는 RobotWorx가 여러 작업 셀과 로봇 시스템에 사용하는 다양한 라이트 커튼을 만듭니다. SICK에 따르면 안전 라이트 커튼은 로봇 시스템 진입 지점의 접근 지점을 보호하는 비용 효율적인 방법입니다. 콤팩트한 것부터 견고한 것까지 다양한 크기로 제공되며 다양한 저항 변형도 있습니다.
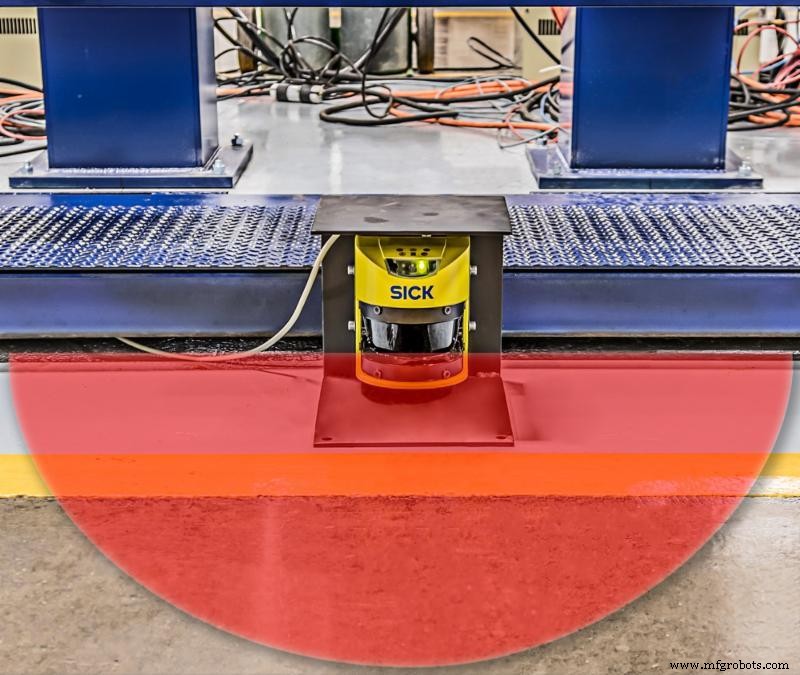
영역 스캐너는 라이트 커튼과 유사합니다. 그러나 빛이 방출기에서 수신기로 전송되는 하나의 특정 영역을 갖는 대신 영역 스캐너는 전체 영역을 스캔할 수 있는 하나의 작은 장치입니다. SICK는 또한 영역 스캐너를 만들고 있으며 그 스캐너는 프로그래밍이 가능하여 회사에서 다양한 응용 분야에서 사용할 수 있는 높은 수준의 성능을 제공합니다. 프로그래밍이 가능하기 때문에 영역 스캐너는 라이트 커튼보다 더 높은 수준의 다용성을 가지고 있습니다. 더 정확한 영역을 음소거할 수 있기 때문입니다(예:로딩 영역). 특정 시스템이나 작업에서 부품을 쉽게 로드 및 언로드할 수 있습니다. 세포.
비상 정지 또는 비상 정지는 비상시에 사용되는 기능입니다. 일반적으로 로봇 작업 셀 또는 시스템 주변에는 하나 이상의 비상 정지 버튼이 있으며 이러한 버튼으로 인해 로봇이 즉시 동작을 중지합니다. 펜스 회로와 달리 비상 정지 회로가 끊어지면 티치 펜던트를 사용해도 로봇이 전혀 움직일 수 없습니다.
무언가가 로봇 시스템의 비상 정지 또는 펜스 회로를 끊을 때마다 안전 재설정 표시등이 켜집니다. 이 표시등은 일반적으로 운전실에 있습니다. 안전 상황을 수정하면 작업자는 안전 재설정 버튼을 누른 다음 시작을 눌러 작업을 재개할 수 있습니다. 안전 상황이 시정되지 않은 경우 재설정이 작동하지 않으며 상황이 시정될 때까지 시스템이 작동하지 않습니다.
위에서 설명한 것과 같은 안전 장비는 로봇 공학에 관한 OSHA 지침에 따라 필요합니다. OSHA Directive STD 1-12-002에서는 이러한 안전 방법(배리어 가드 또는 전자 안전 장치) 중 하나 이상을 제공하여 칩, 스파크, 회전 부품과 같은 작동 위험으로부터 작업자와 직원을 보호해야 한다고 명시합니다. 등. 이것은 모든 기계에 대한 일반적인 규정이지만 OSHA 및 기타 조직에서 로봇에 직접 적용되는 다른 규정이 있습니다.
2012년 RIA(Robotics Industry Association)는 산업용 로봇을 다룰 때 안전을 위한 표준 관행을 완전히 재평가하고 다시 작성했습니다. 이러한 변경 사항 중 하나는 로봇 공학에 대한 기능 안전 지침이었습니다. 기본적으로 RIA R15.06:2012에 따르면 회사는 통합 시스템 및 작업 셀에 대한 위험 평가를 수행하고 사용자에 대한 위험을 줄이기 위해 기능적 안전 설계를 갖추고 있는지 확인해야 합니다. 여기에는 위에 나열된 제품 중 하나 또는 여러 개가 통합될 수 있습니다.
시스템에 적합한 안전 옵션을 선택하는 데 어려움이 있습니까? 877-762-6881로 전화하거나 여기에서 문의 양식을 작성하여 전문가에게 연락하십시오.
산업용 로봇
로봇 시스템에는 로봇이 특정 애플리케이션을 수행하기 위해 함께 작동해야 하는 여러 가지 시스템이 있습니다. 인체의 시스템(신경계, 심혈관계 등)과 마찬가지로 이러한 로봇 시스템이 서로 잘 작동하지 않으면 로봇이 고장나서 심장이 폐에 의존하듯이 서로 의존하게 되고, 그 반대. 이러한 시스템은 컨트롤러, 본체, 전원, 센서 및 도구입니다. 로봇의 두뇌인 컨트롤러는 로봇이 프로그래밍되는 곳입니다. 로봇에게 명령을 내리는 것은 로봇 시스템입니다. 언제, 어디서, 어떻게 움직여야 하는지 알려줍니다. 물체가 얼마나 관대한지 로봇에게 알려주고
로봇 드레스팩은 로봇 시스템을 위한 케이블 및 호스 라우팅을 나타냅니다. ABB Robotics는 로봇 시스템의 복잡성과 유연성에 대한 요구 사항에 따라 고객을 위한 몇 가지 드레스 팩 옵션을 제공합니다. 일부 드레스 팩은 외부에 있는 반면 다른 드레스 팩은 내부에 라우팅되어 각각 ABB 자재 취급 및 스폿 용접 로봇에 대한 장단점이 있습니다. ABB External DressPack은 유연성과 손목 움직임의 복잡성이 많이 필요하지 않은 생산 설정에 권장됩니다. 이러한 케이블은 로봇 외부에 배선되어 수리 목적으로 케이블과 호스를