

산업용 로봇

산업 제조
소비자 및 산업 제품의 기술이 발전함에 따라 로봇 기술과 이러한 제품을 제조하는 프로세스도 발전합니다. 산업용 로봇은 오늘날 우리가 볼 수 있는 크고 작은 많은 제품의 생산과 품질에 큰 역할을 합니다.
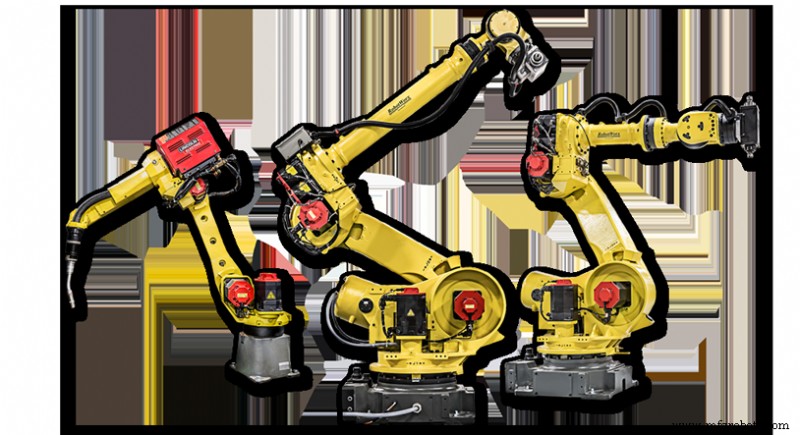
로봇 공학의 발전은 기본 개념을 개선하고 Fanuc 및 Motoman을 포함한 많은 선도적인 로봇 제조업체에서 설계를 마스터했습니다. 6축 산업용 로봇 암은 많은 산업 응용 분야의 표준이 되었습니다. 일부 응용 프로그램 및 제조 계획에서는 원하는 결과에 따라 더 많거나 적은 축이 유리할 수 있습니다. 예를 들어 무거운 팔레타이징 작업을 수행하는 많은 산업에서는 Fanuc M-410과 같이 반복성을 희생하지만 더 무거운 페이로드를 처리하는 4축 로봇을 사용합니다. 극도의 유연성과 정밀도가 필요한 다른 산업에서는 7개의 축을 사용하는 Motoman VA1400 로봇 암과 같이 더 많은 축이 있는 로봇 암을 사용합니다. 오늘날 설계의 초점은 더 높은 정확도, 더 빠른 축 속도, 더 쉬운 프로그래밍 및 더 작은 설치 공간에 있습니다.
오늘날 로봇에는 컴퓨터 칩과 마이크로프로세서 제조 및 용접이 설계에 포함됩니다.
점점 더 많은 소비자 및 산업용 제품이 컴퓨터 칩 및 기타 마이크로프로세서를 사용합니다. 어린이 장난감과 비디오 게임에서 자동차와 산업용 CNC 기계에 이르기까지 컴퓨터 칩은 더 작고 더 많은 정보를 담을 수 있도록 개발되고 있습니다. 산업용 로봇은 이러한 장치를 정확하게 이동, 취급 및 조립할 수 있는 정밀도를 가지고 있습니다. 많은 산업용 로봇 암은 마이크로프로세서가 자주 취급되는 "클린룸" 환경에서 작동하도록 밀봉 및 설계되었습니다.
아크 용접 및 스폿 용접은 산업용 로봇이 수행하는 많은 응용 분야를 설명합니다. 설계자는 이러한 애플리케이션을 수행하는 로봇 암의 반복성, 축 속도 및 유연성을 개선하기 위해 지속적으로 노력합니다. 일부 로봇은 +/- 0.02밀리미터까지 정확하고 초당 몇 미터 이동할 수 있습니다. 로봇 기술의 발전으로 인해 제조 분야에서 개선의 여지가 더 많아졌습니다.
산업용 로봇
로봇은 George Charles Devol이 발명한 최초의 산업용 로봇인 Unimate 이후 먼 길을 왔습니다. 그 이후로 산업용 로봇은 국제표준화기구(ISO)에서 3개 이상의 축에서 프로그래밍할 수 있는 자동 제어, 재프로그래밍 가능, 다목적 조작기로 정의되었습니다. 이 기사에서는 현재 또는 미래의 로봇 사용자가 알아야 할 로봇에 대한 몇 가지 주요 사실을 살펴볼 것입니다. 로봇 유형: 로봇에는 3가지 주요 유형이 있습니다. 다관절 로봇 - 이러한 유형의 로봇에는 회전 관절이 있습니다. SCARA - 이 로봇은 Select
6축 로봇 팔은 오늘날 시장에서 가장 일반적으로 통합된 산업용 로봇입니다. 산업용 애플리케이션은 훨씬 더 광범위한 솔루션과 함께 광범위한 요구 사항을 제시합니다. 산업용 로봇 제조업체는 제조 응용 프로그램을 자동화하기 위해 다양한 산업용 로봇 팔을 설계하고 개발했습니다. 하나의 로봇 축은 하나의 자유도와 같습니다. 각 축 또는 자유도는 전체 로봇 암을 프로그래밍된 지점으로 이동하는 역할을 합니다. 6개의 축을 사용하면 로봇 팔이 x, y, z 평면에서 움직일 수 있을 뿐만 아니라 롤, 피치 및 요 이동을 사용하여 위치를 지정할