

제조공정

산업 제조
 |
| × | 1 | |||
| × | 5 |
 |
| |||
 |
|
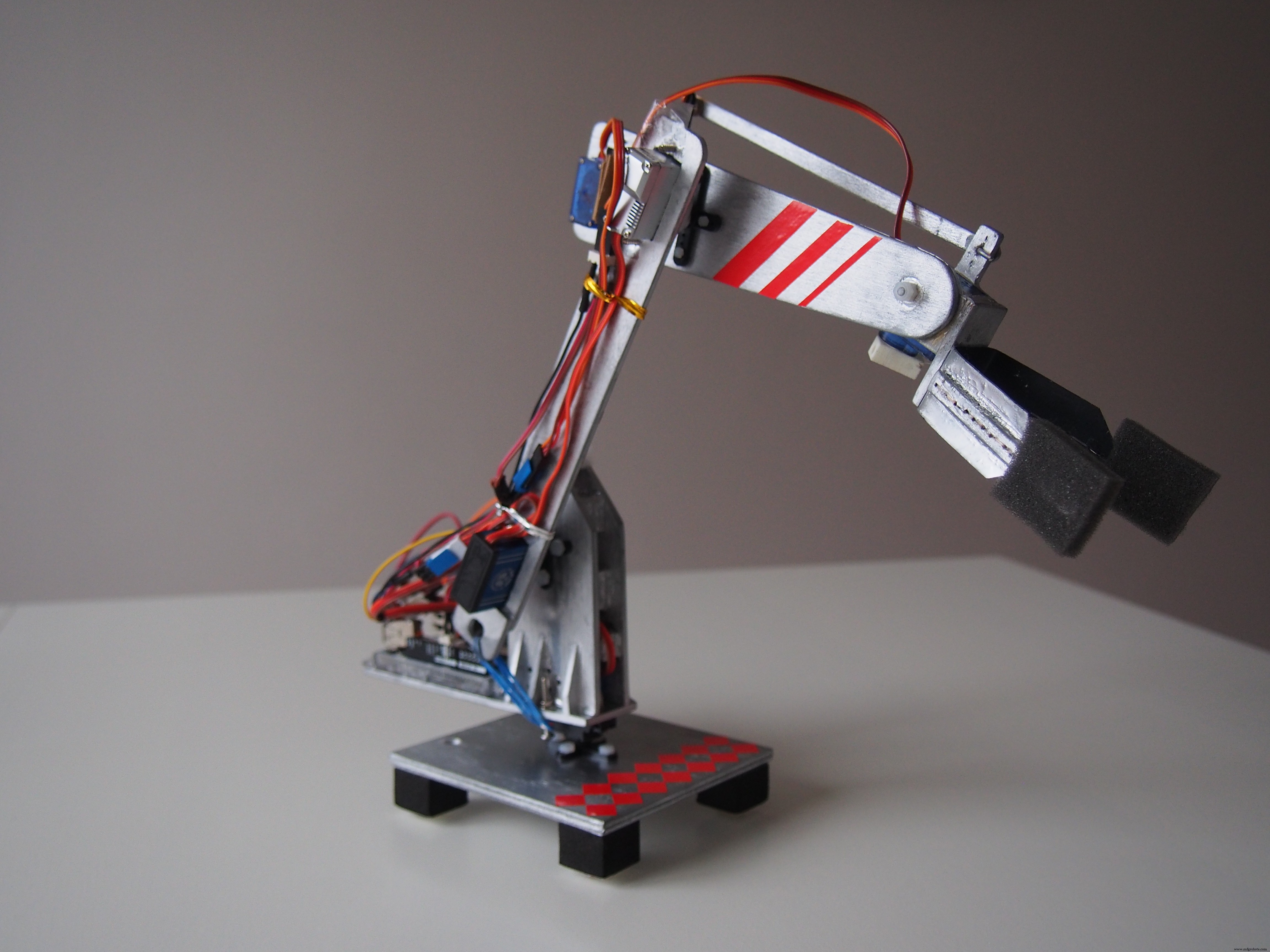
이것은 다음과 같은 기능을 가진 제 첫 로봇 팔입니다.
<울>결과에 매우 만족합니다. 따라서 제 경험과 구축 방법을 공유하고자 합니다.
구성 요소 및 재료
로봇을 만들려면 다음이 필요합니다.
<울>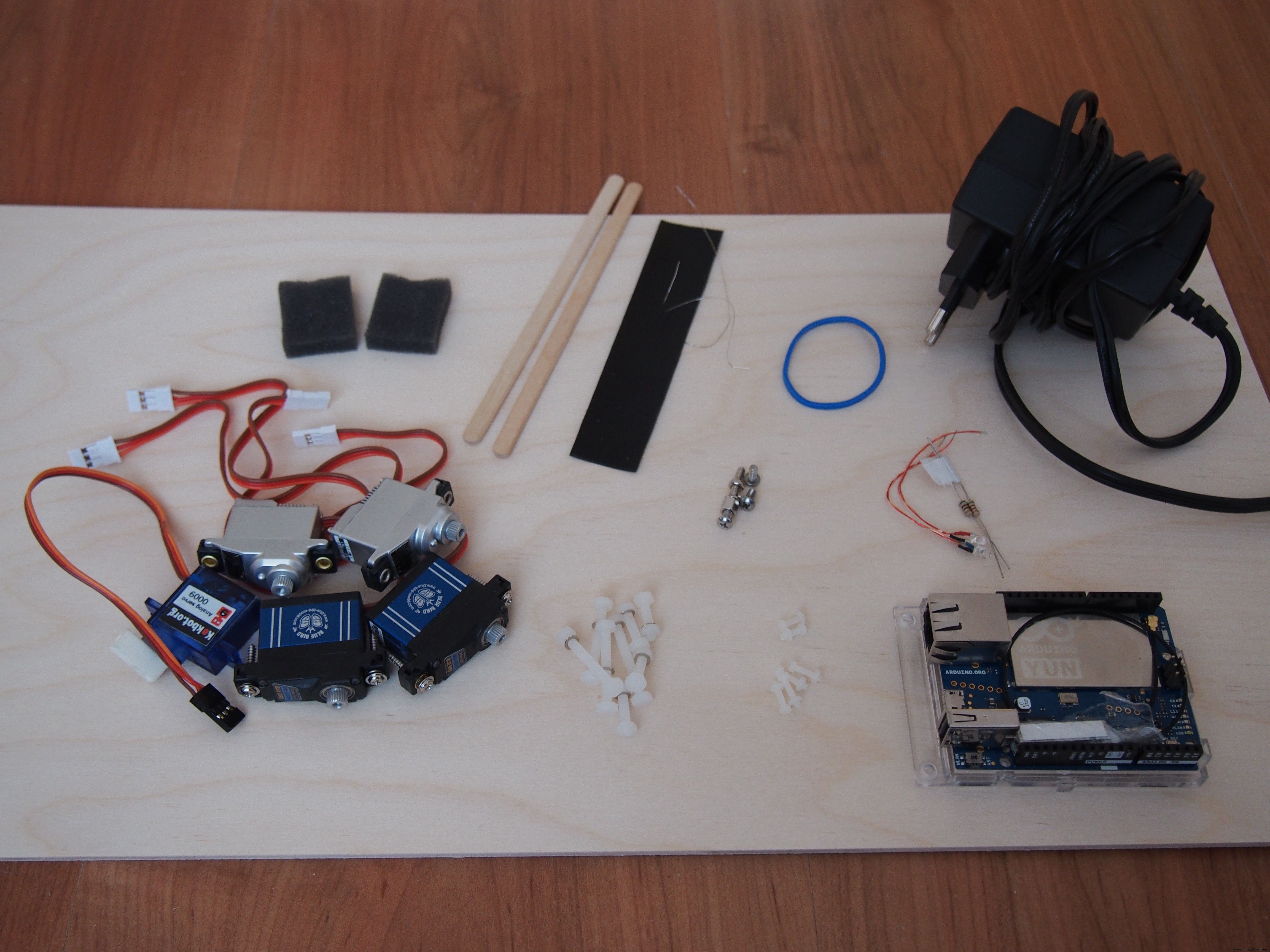
로봇 만들기
로봇을 구축하려면 먼저 서보 크기를 측정하고 서보 토크를 확인하십시오. 이것은 팔의 크기와 궁극적으로 로봇의 크기에 대한 표시를 제공합니다. 제 경우에는 2개의 서로 다른 마이크로 고토크 서보(첫 번째 쌍과 두 번째 쌍)를 주문했습니다. 120도를 이동하도록 지정되어 있어도 최대 140도까지 이동할 수 있습니다. 그러나 더 많은 이동 각도를 위해 180도 서보를 구입하는 것이 좋습니다.
그리퍼의 경우 고토크 서보가 필요하지 않습니다. eBay에서 가장 저렴한 마이크로 서보가 이 작업을 수행할 수 있습니다.
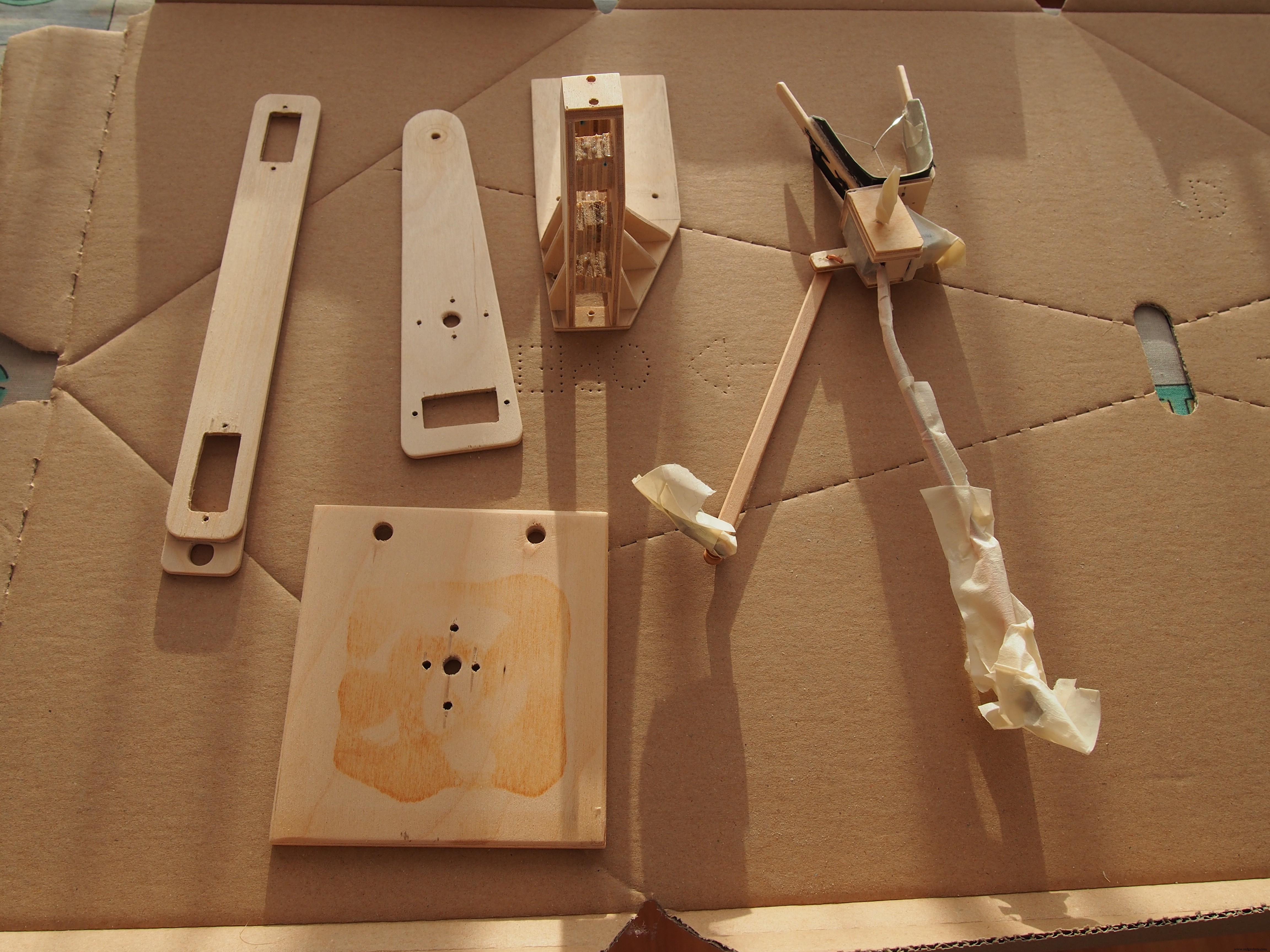
사진 1에서 볼 수 있는 것처럼 팔을 자르는 것부터 시작하세요. 여기에서 창의력을 발휘할 수 있습니다. 고정된 디자인이 없으며 자신만의 디자인을 생각해낼 수 있습니다. 그런 다음 반으로 자른 하나의 믹싱 스틱과 스프링 리턴으로 플라스틱 시트를 사용하여 그리퍼를 만듭니다. 내부에 연결된 와이어로 그리퍼를 닫고 열 수 있습니다. 내 로봇의 경우 하나의 M3 나사를 사용하여 그리퍼 피벗을 만들었습니다. 그리퍼 회전은 무게 균형을 얻기 위해 암의 다른쪽에 위치한 서보에 의해 수행됩니다. 전력은 다른 믹싱 스틱을 통해 전달됩니다(로봇 상단 사진 2 참조).
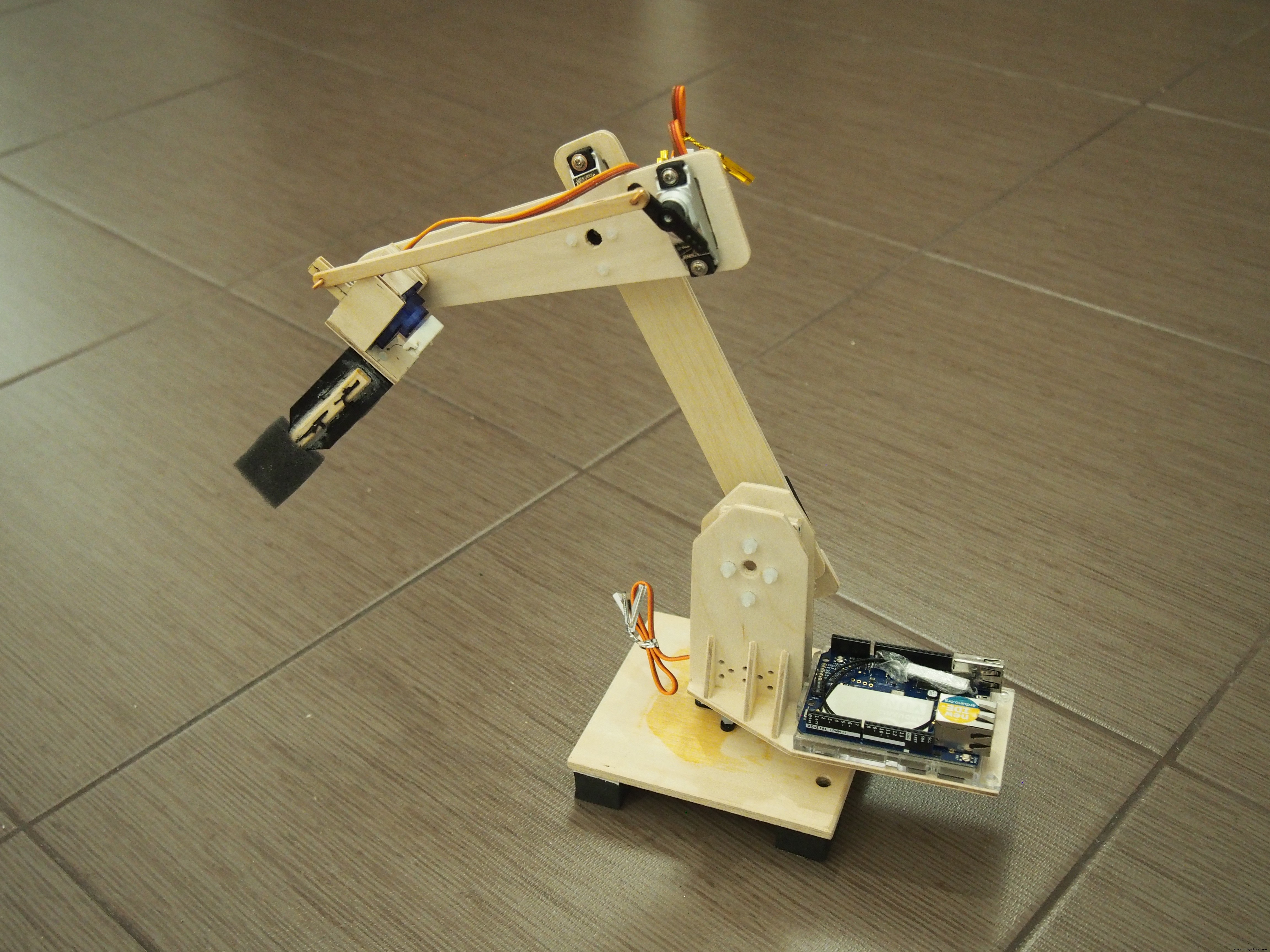
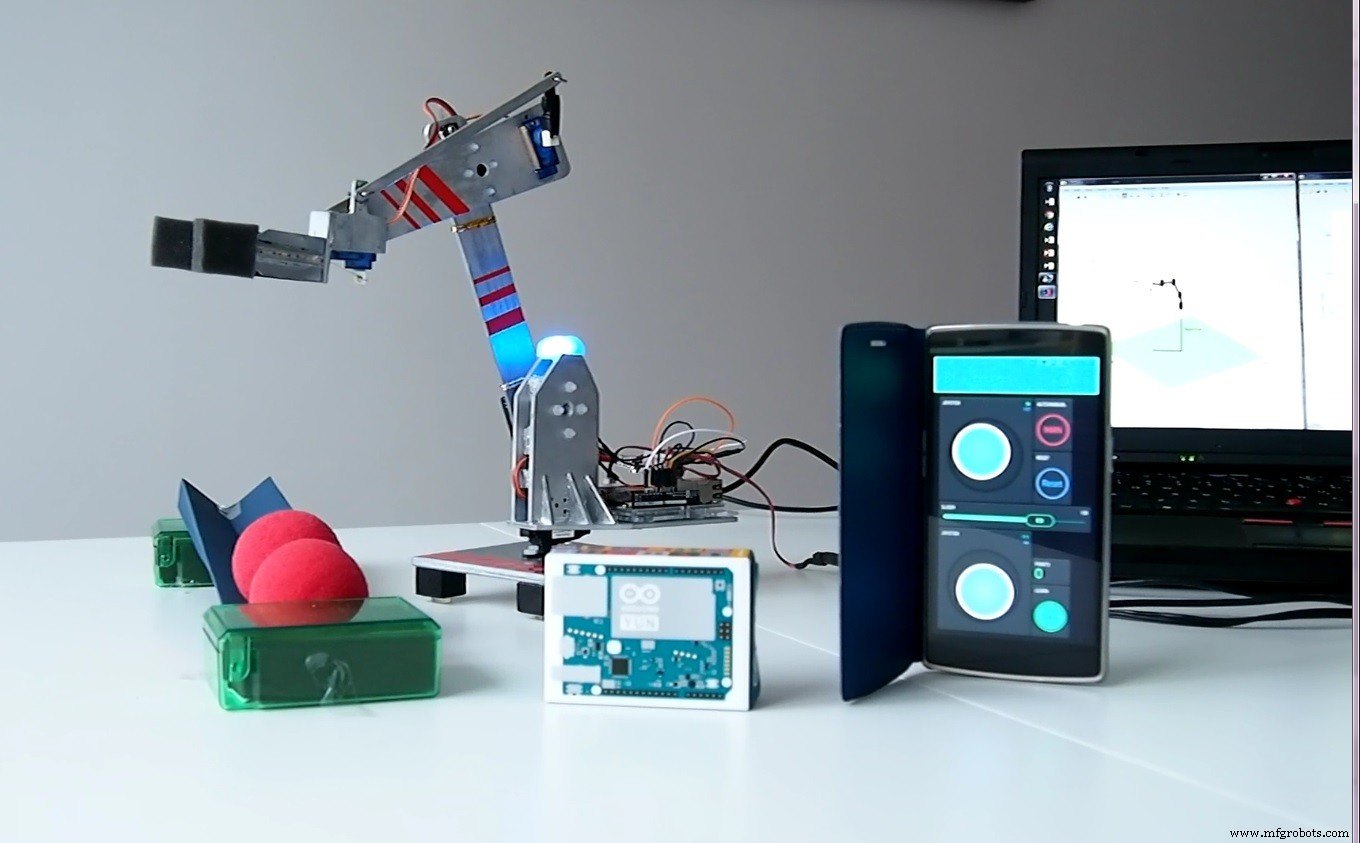
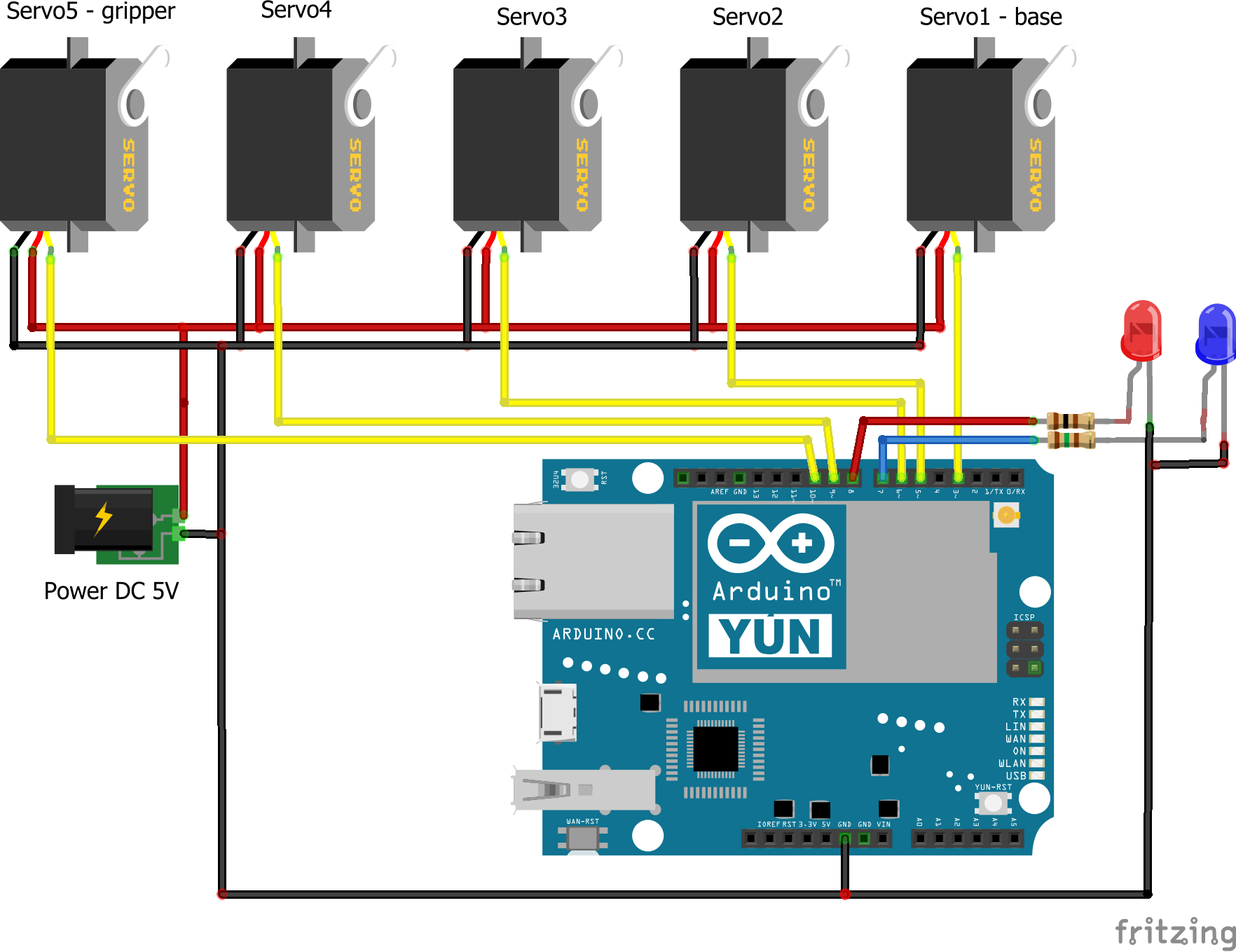
다음으로 베이스 서보와 Arduino Yun 보드(또는 다른 보드)를 고정하는 베이스와 플레이트를 빌드합니다. 모든 것을 합치면 사진 2와 같은 것이 될 것입니다.
더 보기 좋은 디자인을 원하면 나무 구성 요소를 사포로 갈아서 원하는 색상으로 칠하십시오(사진 3에서와 같이). 내 로봇의 경우 빨간색 줄무늬가 있는 은색(금속을 모방하기 위해)을 선택했습니다. 최종 결과는 사진 4에 나와 있습니다.

소프트웨어
소프트웨어의 경우 먼저 Blynk에서 인터페이스를 만드는 것으로 시작했습니다. 이전에 Blynk를 사용한 적이 없다면 웹사이트에서 사용 방법을 확인하십시오. 매우 쉽고 간단해야 합니다.
참고: 인터넷에 연결할 수 있는 보드가 없더라도 USB 포트를 통해 Arduino Uno와 같은 일반 보드와 함께 Blynk를 계속 사용할 수 있으므로 걱정하지 마십시오. 이렇게 하려면 여기를 읽으십시오.
다음으로 Arduino IDE로 이동하여 코드를 작성해 보겠습니다. 편의를 위해 코드를 첨부했으니 그냥 사용하시면 됩니다 :) 실행하려면 다음을 수행해야 합니다.
<울>참고: MotionGenerator 라이브러리는 한 지점에서 다른 지점으로 매끄럽게 전환할 수 있는 분석 기반 솔루션입니다. 최대 속도와 가속도를 제한할 수 있습니다.

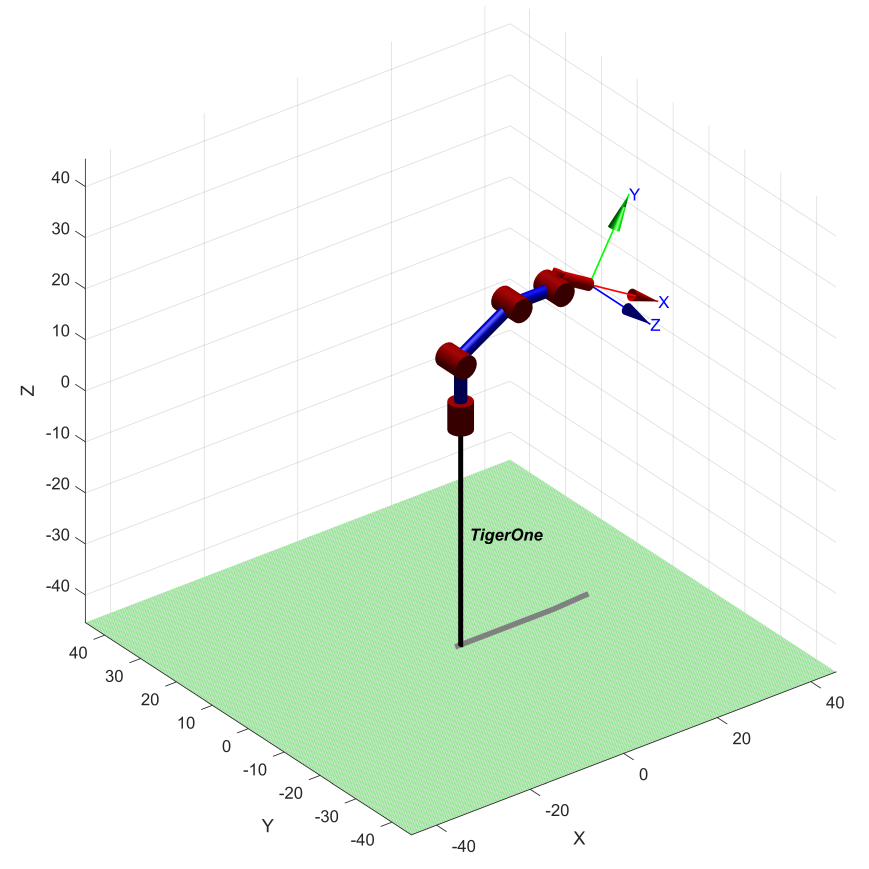
선택 사항(순운동학, 위의 사진 3 참조): 이를 위해서는 Matlab과 Robotics Toolbox가 필요합니다. 이 모든 것을 설정했다면 로봇이 Blynk에 연결되어 있고 컴퓨터의 USB 포트에 연결되어 있는지 확인하십시오. Matlab은 직렬 통신을 통해 Arduino에서 정보를 수집합니다. 따라서 MainScrip.m에서 올바른 COM 포트를 입력해야 합니다. 마지막으로 MainScrip.m을 실행하십시오.
참고:로봇 운동학은 내 로봇을 위한 것입니다. 로봇의 경우 치수가 다를 수 있습니다(robotKinematicsFcn.m에서 자유롭게 조정).
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">
미리보기 없음(다운로드만 가능).
제조공정
높은 정확도가 필요한 작업으로 어려움을 겪고 있습니까? 아니면 높은 정밀도와 성능이 요구되는 일관되고 반복적인 작업을 처리하고 있습니까? 그렇다면 로봇 팔 프로젝트가 필요합니다. 또한 다양한 작업을 수행할 수 있는 안정적인 전자 PCB 장치입니다. 따라서 다음과 같은 다양한 산업 분야에서 로봇 팔을 찾을 수 있습니다. 머신 액세스 실험실 산업 자동화 제조 따라서 로봇 팔 프로젝트를 수행하는 것은 훌륭한 아이디어가 될 것입니다. 의심할 여지 없이 처음에는 복잡해 보이지만 모든 재료가 준비되어 있으면 작업이 더 간단해집니다. 이
로봇 팔 컨트롤러는 각 로봇의 신경 중심입니다. 컨트롤러는 프로그래밍된 코드를 티치 펜던트에서 로봇으로 공급하여 로봇이 다른 시스템과 상호 작용하거나 애플리케이션을 실행할 수 있도록 하는 대형 컴퓨터입니다. 로봇 컨트롤러에는 회사에 따라 풀 사이즈 컨트롤러와 컴팩트 컨트롤러의 두 가지 크기가 있습니다. Fanuc, Motoman 및 KUKA와 같은 많은 회사는 다양한 로봇을 위한 풀 사이즈 컨트롤러와 컴팩트 컨트롤러를 모두 가지고 있습니다. 그러나 추세는 공간과 에너지를 절약하는 더 작고 컴팩트한 로봇 팔 컨트롤러 쪽으로 더 이동