

제조공정

산업 제조
| × | 3 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 |
 |
| |||
 |
|
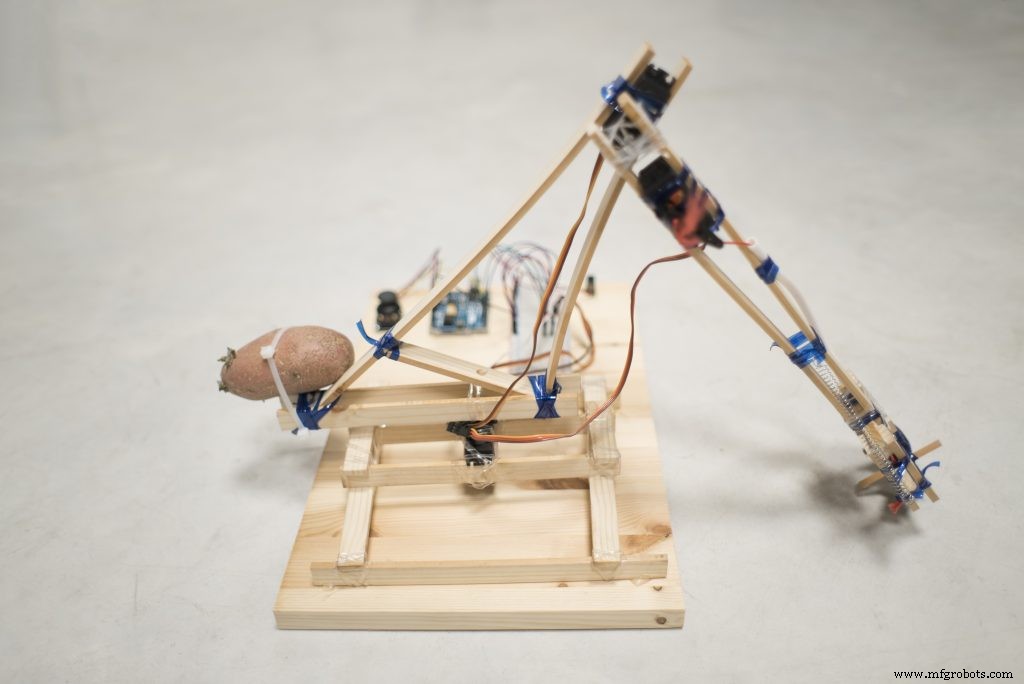
로봇 팔은 온라인에서 찾을 수 있는 가장 인기 있는 DIY 프로젝트 중 하나입니다. 우리가 우리 버전의 Arduino 로봇 팔을 디자인하기 위해 자리에 앉았을 때 우리는 도전을 시작하고 재활용 재료로 만들기로 결정했습니다. 우리가 볼 때 제작자가 된다는 것은 또한 상자에서 벗어나 더 많은 낭비를 일으키지 않고 사용 가능한 다양한 재료를 활용하는 방법을 스스로에게 묻는 것을 의미합니다. 나무 조각과 플라스틱 병을 사용하여 로봇 팔의 몸체를 조립합니다. 온라인에서 배운 깔끔한 기술로 플라스틱 병에서 열 수축을 만들고 로봇이 넘어지지 않도록 감자(!)를 추로 사용했습니다.
이 프로젝트는 우리가 만들기 를 좋아하는 이유를 상기시켜 주었기 때문에 매우 재미있었습니다. 너무합니다.
블로그에서 이 프로젝트 및 기타 프로젝트에 대한 전체 자습서를 찾을 수도 있습니다.
참고: video 이전 버전의 circuito.io를 볼 수 있으므로 자습서의 단계를 따르는 것이 가장 좋습니다.
전자 제품
주요 구성 요소 <울>
보조 구성 요소 <울>
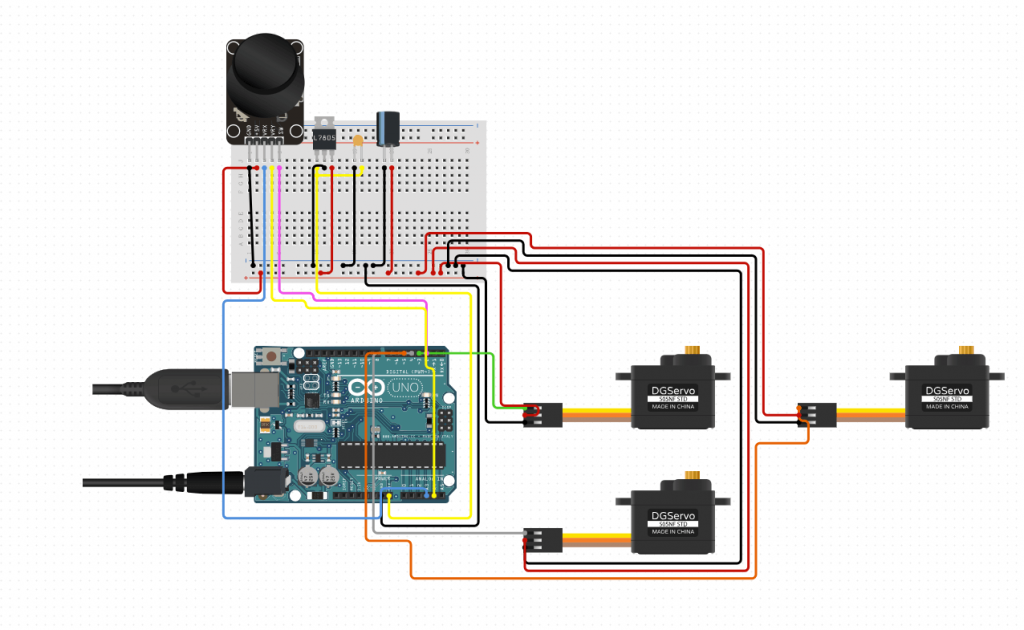
배선도를 보려면 여기를 클릭하십시오.
로봇 팔 코드 <울>
자료
 <울>
<울>
어셈블리
베이스
팔이 넘어지지 않도록 견고한 베이스로 빌드를 시작합니다. 동시에 기초가 견고하도록 나무 조각을 묶고 묶는 가장 좋은 방법이 무엇인지 이해해야 합니다.
아래 이미지에서 열수축과 감자(!)를 베이스로 무게를 사용한 방식을 볼 수 있습니다. 수시로 교체하는 것을 잊지 마세요 :)
잔액
두 번째 서보를 배치하는 것이 더 까다로웠고 이 영역에 여전히 약간의 주의가 필요하다고 생각합니다. 프로토타입을 제작한 후 상완의 균형에 대해 충분히 고려하지 않았다는 것을 깨달았습니다. 따라서 서보 모터는 많은 전류를 소비합니다. 이는 암의 반대쪽에 균형추를 사용하여 극복할 수 있는 것입니다.
그리퍼
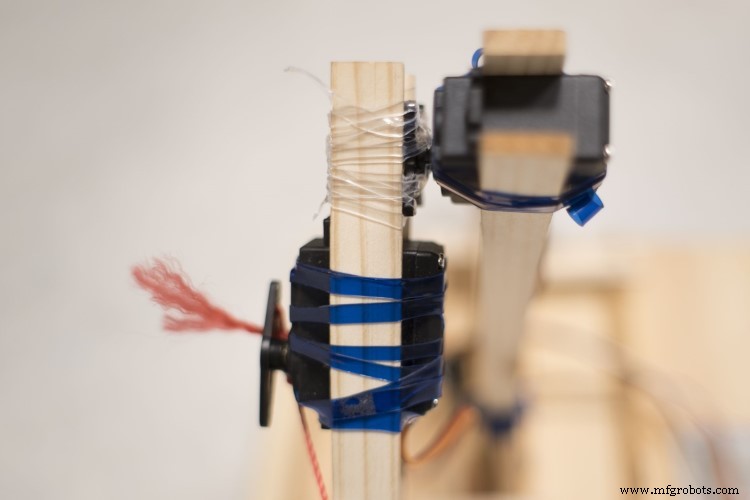
우리는 다양한 유형의 그리퍼를 고려했으며 여기서 무엇을 할지 확신하지 못했습니다. 결국 우리는 그립이 강하도록 그리퍼의 한쪽을 고정하기로 결정했습니다. 아래 이미지에서 볼 수 있듯이 움직이는 부분에 대해 서보로 제어되는 조인트를 만들고 닫고 열 수 있는 스프링을 추가했습니다.
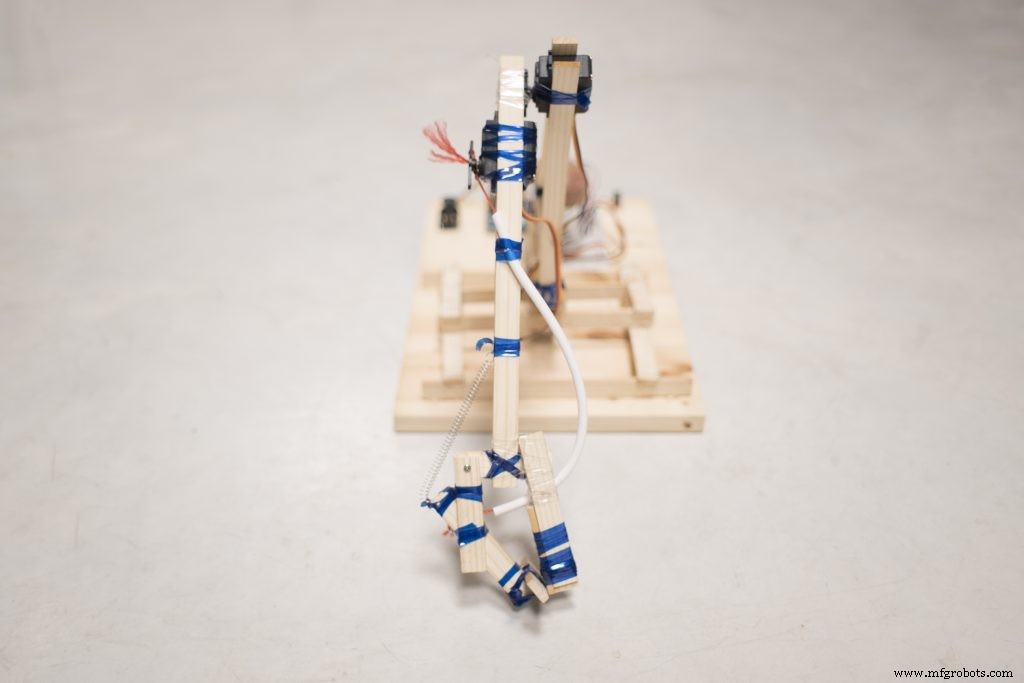
결국 우리는 자전거 브레이크에서 볼 수 있는 것과 같은 메커니즘인 서보 모터와 그리퍼 사이를 연결하기 위해 탄성 튜브 안에 끈을 넣었습니다.
기본적으로 그렇습니다! 사용하는 재료와 전자 제품에 따라 코드와 역학을 약간 수정하고 변경해야 할 것입니다. 통찰력이나 의견이 있으면 듣고 싶습니다! 포럼이나 아래 댓글에서 공유하세요.
<섹션 클래스="섹션 컨테이너 섹션 축소 가능" id="코드">
제조공정
누군가가 공장용 로봇을 구매하기로 결정하면 프로세스가 빠르게 시작될 수 있지만 일반적으로 작업장에서 승인하고 현실화하는 데 약간의 시간이 걸립니다. 로봇을 구매하는 것은 복잡한 과정이 아니지만 비용이 많이 들 수 있기 때문에 구매하기 바로 전에 모든 것이 제대로 설계되었는지 확인하는 데 시간이 걸립니다. RobotWorx의 전문가가 구매 프로세스를 쉽게 진행할 수 있도록 도와드립니다. 그렇다면 새 로봇을 구입하기로 결정했을 때 가장 먼저 하는 일은 무엇입니까? 통합업체에 접근하기 전에 해당 로봇이 수행할 작업에 대해 어느 정도
자동 스핀들링은 다양한 응용 분야에서 (수동 작업에 비해) 보다 일관되고 정확하며 전반적으로 고품질 제품을 생산할 수 있습니다. 스핀들링 로봇은 재료 제거, 디버링, 밀링 또는 정밀 라우팅과 같은 응용 분야에 탁월한 선택입니다. 제조 공정에서 작업물을 깨끗하고 균일하게 만드는 데 도움이 됩니다. 스핀들링 공정은 재료 제거 공정 중에 많은 양의 먼지와 입자를 생성하기 때문에 자동화된 로봇은 위험한 작업 환경에서 사람을 자유롭게 하고 제거하는 데 도움이 됩니다. 작업 및 애플리케이션의 특정 요구 사항에 따라 다양한 EOAT(예:Co