

나노물질

산업 제조
중요한 3세대 반도체 재료로서 원자 규모에서 6H-SiC의 미세 변형 및 제거 메커니즘은 원자 단계로 매우 매끄럽고 손상 없는 표면을 얻는 데 필수적입니다. 현재의 실험 수단으로는 나노가공 영역의 표면/하부를 직접 관찰하는 것이 어렵기 때문에 분자 역학 방법은 전위 슬립 운동, 상전이 및 물질 분리 메커니즘과 같은 나노가공 공정의 원자 규모 세부 사항을 연구하는 데 사용됩니다. 6H-SiC의 슬립 변형 및 나노미터 가공성에 대한 결정학 유도 이방성의 영향을 중점적으로 조사했습니다. 이 연구는 6H-SiC의 미세 변형 및 나노 가공 공정의 이해에 크게 기여합니다.
SiC는 밴드갭이 넓은 3세대 반도체 재료로서 높은 항복전계, 높은 복사저항, 높은 캐리어 포화속도, 빠른 열전도율, 작은 유전상수, 안정된 화학적 성질 등의 특성을 가지고 있어 다양한 분야에 응용되고 있습니다. 고온, 고주파, 고전력, 방사선 방지 및 단파장 광전자 장치 및 광전자 통합 [1].
가장 널리 사용되는 SiC 결정은 3C, 4H 및 6H입니다. 연삭/래핑/연마와 같은 가공 방법은 여전히 단결정 SiC 가공의 주요 방법입니다. 그러나 다이아몬드와 SiC의 경도 비율은 2:1에 가깝고(가공 깊이 <50 nm), 이는 가공 공정에서 권장되는 값인 5:1보다 훨씬 낮습니다[2]. 절삭 공구의 심한 마모와 표면 아래 손상은 웨이퍼 품질에 직접적인 영향을 미칩니다. 이러한 문제를 해결하기 위해 나노 스케일에서 SiC의 제거 거동을 이해하기 위해 많은 작업이 수행되었습니다. 3C-SiC의 제거 메커니즘과 가공 요인의 영향은 절삭 공정 중 소성 변형 메커니즘[3,4,5,6,7], 공구 마모[8], 마찰 거동[9 ], 3C-SiC의 이방성[10] 및 절삭 온도의 영향[11].
6H-SiC는 더 복잡한 ABCACB 스택 구조를 가지고 있습니다. SPDT(단일 포인트 다이아몬드 선삭) 가공에서 6H-SiC의 제거 메커니즘(예:재료 제거 공정[12] 및 취성-연성 전이[13]에 대한 공구 경사각의 영향)이 연구되었지만 연구는 분명히 3C-SiC 미만. 6H-SiC(3eV)의 밴드갭은 3C-SiC(2.3eV)보다 분명히 더 높습니다. 현재 6H-SiC 막대 성장 공정의 기술 수준은 3C-SiC보다 훨씬 높습니다. 6H-SiC는 3C-SiC보다 산업 응용 분야에서 훨씬 더 많이 사용됩니다. Schottky rectifier, thyratron, power MOSFET(Metal-Oxide-Semiconductor Field-Effect Transistor) 등 고주파, 고전력, 고온 분야에 해당 소자가 적용되고 있다. 6H-SiC의 가공면/표면 아래 품질을 향상시키기 위해 현재 가장 효율적이고 효과적인 수단은 6H 공정에 보다 적합한 결정면(가공면)/결정 방위(가공 방향)의 적절한 조합을 찾는 것입니다. -SiC.
스크래치 실험 및 시뮬레이션은 제거 거동을 탐색하는 가장 일반적이고 효과적인 방법 중 일부입니다[14, 15]. 긁힘 공정 중 재료 제거 메커니즘에 대한 연구는 실제 연마 가공 공정에 큰 지침이 됩니다. 분자 역학 방법은 나노 스케일에서 손상 형성 및 제거 과정을 제공할 수 있습니다. 따라서 분자 역학 스크래칭 시뮬레이션을 사용하여 결정학 유도 이방성의 영향 하에 6H-SiC의 제거 거동을 분석했습니다.
이 논문의 절단 시뮬레이션은 대규모 원자/분자 대량 병렬 시뮬레이터(LAMMPS)[16]를 사용하여 완료되었습니다. 본 연구에서는 모델 가시화 및 결함 식별을 위해 OIVTO[17] 및 다이아몬드 구조 식별 방법[18]을 사용하였다. 공작물 및 도구 모델링의 구현은 다른 소프트웨어의 도움 없이 LAMMPS에 의존했습니다. 그림 1a-c와 같이 공작물과 공구를 모두 변형체로 설정하고 시뮬레이션 중에 마모 거동을 조사했습니다. 도구 및 공작물 모델은 경계 원자층, 온도 조절 원자층 및 뉴턴 원자 영역의 세 부분으로 나뉩니다. 공작물을 초기 위치에 유지하기 위해 공작물의 하단과 오른쪽 끝에 경계층 원자를 고정했습니다. 온도 조절기 층과 뉴턴 층의 원자는 뉴턴의 제2법칙을 따릅니다. y를 따라 주기적인 경계가 적용되었습니다. 방향. 스크래치 시뮬레이션 전에 모델은 Berendsen 온도 조절 장치 방법을 사용하여 NVE 앙상블에 의해 완화되었습니다. 50ps 이완 기간은 긁힘 시뮬레이션 전에 적용되어 정상 에너지 상태를 얻었습니다. 연마 형태는 모서리에서 모서리까지의 각도가 90°인 구형 크라운 삼각형 피라미드입니다. 그림 2와 같이 6H-SiC의 공통 결정면(a면(기저면), m면(프리즘 평면), c면)을 가공면으로 선택하였다. 구조의 대칭성을 고려하여 다음 평면/방향 조합이 가공 표면/가공 방향으로 선택되었습니다. \( (0001)/\left[2\overline{1}\overline{1}0\right] \), \( (0001)/\left[10\overline{1}0\right] \), \( \left(01\overline{1}0\right)/\left[2\overline{1}\overline{ 1}0\오른쪽] \), \( \left(01\overline{1}0\right)/\left[0001\right] \), \( \left(11\overline{2}0\right) /\left[1\overline{1}00\right] \) 및 \( \left(11\overline{2}0\right)/\left[0001\right] \). 시뮬레이션의 처리 매개변수는 표 1에 나와 있습니다. 긁힘 시뮬레이션 전에 연마재는 공작물의 왼쪽에 배치되었고 연마재 팁은 공작물의 상단 표면 아래 50 Å입니다. 연마재와 공작물 사이의 가장 가까운 거리는 상호 작용 전위의 차단 범위에서 멀리 떨어진 30 Å입니다. 연마재가 공작물의 자유단에서 x의 양의 방향으로 이동합니다. -축을 만들고 긁는 과정을 완료합니다.
<그림>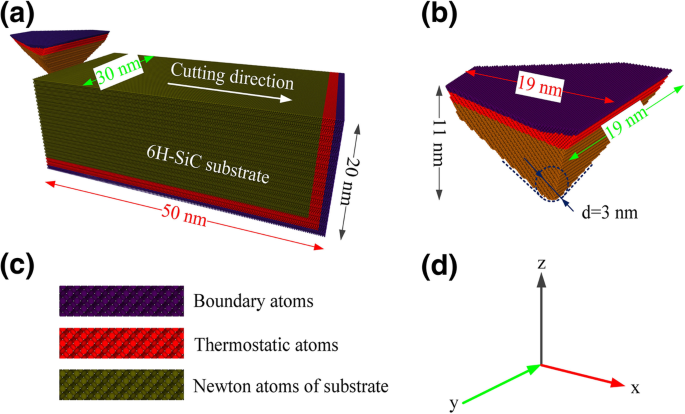
아 나노 스크래칭 시뮬레이션의 MD 모델. ㄴ 도구의 형태. ㄷ 모델의 구조. d 축 방향
<그림>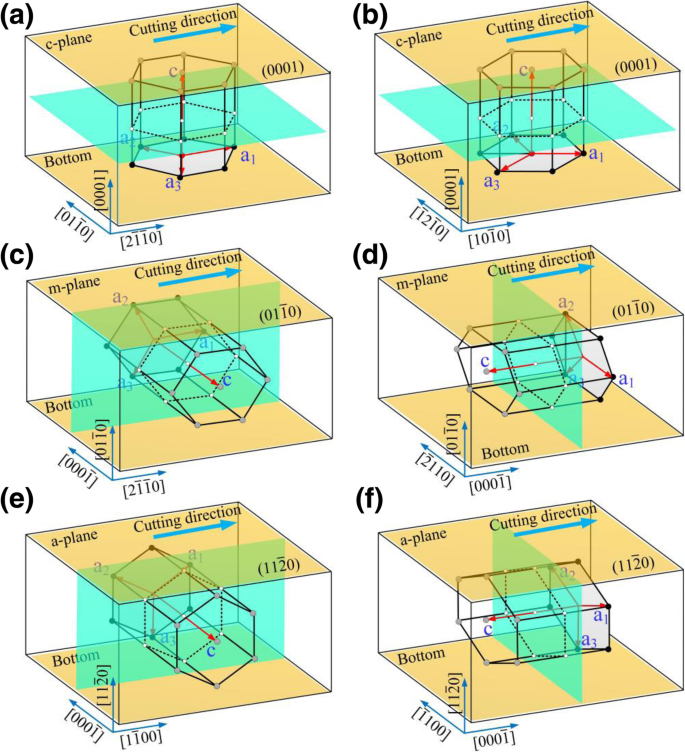
a 긁는 과정의 개략도 –f 해당 프로세스 모드는 \( (0001)/\left[2\overline{1}\overline{1}0\right] \), \( (0001)/\left[10\overline{1}0\right입니다. ] \), \( \left(01\overline{1}0\right)/\left[2\overline{1}\overline{1}0\right] \), \( \left(01\overline{ 1}0\right)/\left[0001\right] \), \( \left(11\overline{2}0\right)/\left[1\overline{1}00\right] \), \( \left(11\overline{2}0\right)/\left[0001\right] \), 각각
원자 전위 함수는 분자 역학 시뮬레이션의 정확성과 신뢰성에 중요한 역할을 합니다. 단결정 SiC의 기계적 특성 및 제거 메커니즘에 대한 이전 테스트 및 시뮬레이션에 따르면 Erhart와 Albe[19]가 제안한 ABOP(analytical bond order potential) 함수는 실리콘과 탄소의 상호 작용에 더 적합합니다. 포텐셜 함수에 사용된 매개변수는 표 2[19]에 나와 있습니다. Tersoff 포텐셜 에너지 함수[6] 대신 ABOP 포텐셜 함수는 공정 중 도구와 공작물 사이의 Si-Si, CC 및 Si-C 상호 작용을 정의하는 데 사용됩니다[2, 7, 8, 10, 11].
그림과 같이 도 3 및 4에서 볼 수 있는 바와 같이, 6H-SiC의 이방성은 나노미터 가공성(가공 깊이, 제거 모드, 제거량 및 표면 아래 손상 깊이(SSD) 등)에 상당한 영향을 미쳤습니다. 가공면/가공방향과 기저면/c의 관계에 따라 -축(그림 3 참조), 재료 가공 모드는 세 가지 범주로 나눌 수 있습니다. -축은 가공 방향에 수직이고 (iii) c -축은 가공 방향과 평행합니다.
<그림>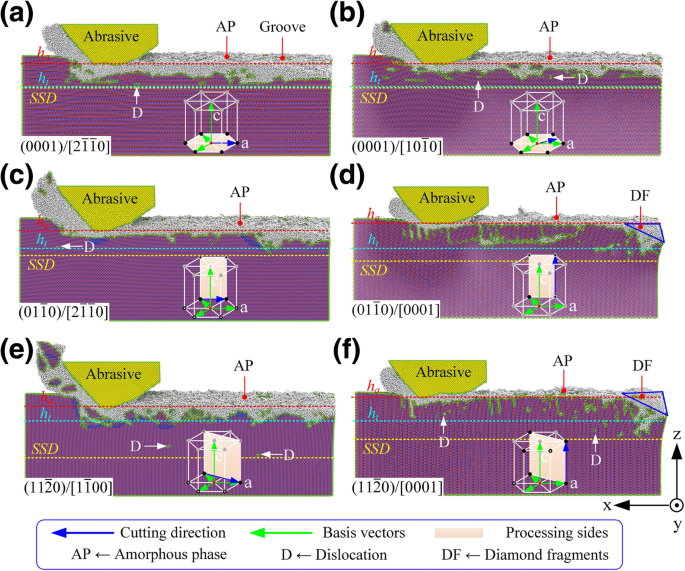
a에서 다양한 결정면/배향 조건에서 가공된 표면의 지형 –f 해당 프로세스 모드는 \( (0001)/\left[2\overline{1}\overline{1}0\right] \), \( (0001)/\left[10\overline{1}0\right입니다. ] \), \( \left(01\overline{1}0\right)/\left[2\overline{1}\overline{1}0\right] \), \( \left(01\overline{ 1}0\right)/\left[0001\right] \), \( \left(11\overline{2}0\right)/\left[1\overline{1}00\right] \), \( \left(11\overline{2}0\right)/\left[0001\right] \), 각각
<그림>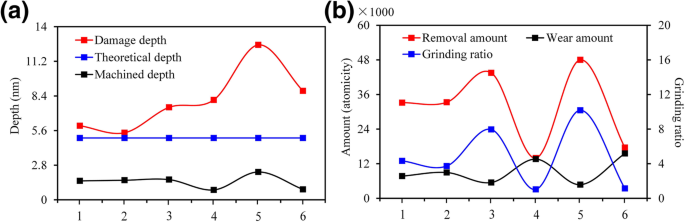
다양한 결정면/배향 조건에서 나노미터 가공성, a 가공 깊이 및 손상 깊이에 대한 이방성의 영향 b 제거량, 마모량 및 연삭율에 대한 이방성의 영향. 1, 2, 3, 4, 5 및 6은 해당 프로세스 메서드입니다. \( (0001)/\left[2\overline{1}\overline{1}0\right] \), \( (0001)/ \left[10\overline{1}0\right] \), \( \left(01\overline{1}0\right)/\left[2\overline{1}\overline{1}0\right] \), \( \left(01\overline{1}0\right)/\left[0001\right] \), \( \left(11\overline{2}0\right)/\left[1\ overline{1}00\right] \) 및 \( \left(11\overline{2}0\right)/\left[0001\right] \) 손상층 깊이는 긁힘으로 인한 결정 내부 결함의 최대 깊이를 나타냅니다. 이론적인 깊이는 처리하기 전에 미리 설정된 깊이를 나타냅니다. 가공 깊이는 긁힌 후의 잔여 깊이를 나타냅니다. 제거량은 공작물 재료가 제거되는 원자의 수를 나타냅니다. 마모량은 긁힘 전후의 연마입자의 원자수 차이를 말합니다.
(i) 그림 3a, b에서 볼 수 있듯이 6H-SiC의 나노 가공성은 가공 모드가 \( (0001)/\left[2\overline{1}\overline{1}0]로 선택되었을 때 매우 유사했습니다. \right] \) 및 \( (0001)/\left[10\overline{1}0\right] \). 그러나 6H-SiC의 제거 과정은 처리 모드가 \( (0001)/\left[10\overline{1}0\right] \)로 선택되었을 때 취성 모드로 더 기울어졌다. (ii) 그림 3c, e와 같이 처리 모드를 \( \left(01\overline{1}0\right)/\left[2\overline{1}\overline{1}0으로 선택했을 때 \right] \) 및 \( \left(11\overline{2}0\right)/\left[1\overline{1}00\right] \), 가공 깊이 및 재료 제거량은 이들보다 훨씬 높음 다른 처리 방법에서. 그림 4와 같이 동일한 이론적 처리 깊이(h 그 =5.0 nm), 처리 모드 \( \left(11\overline{2}0\right)/\left[1\overline{1}00\right] \)에서 재료 제거율은 3.4배 처리 모드에서 \( \left(01\overline{1}0\right)/\left[0001\right] \). 재료 처리 비율(재료 제거량/공구 마모)은 10.1이었지만 이 처리 매개변수의 SSD도 다른 처리 조건보다 훨씬 높아 \( (0001)/\left[10\overline{ 1}0\오른쪽] \). 가공된 표면과 칩에는 많은 수의 나노결정이 있었습니다. 이 조건에서 많은 취성 파손이 발생했습니다. 처리 모드 \( \left(11\overline{2}0\right)/\left[1\overline{1}00\right] \)는 높은 처리 효율이 필요하지만 지하 손상. \( \left(01\overline{1}0\right)/\left[2\overline{1}\overline{1}0\right] \) 의 재료 제거율은 \( \left (11\overline{2}0\right)/\left[1\overline{1}00\right] \) 하지만 SSD는 후자의 50%에 불과했습니다. 또한 가공면의 비정질층의 두께는 \( (0001)/\left[2\overline{1}\overline{1}0\right] \) 및 \( (0001)보다 훨씬 얇다. /\left[10\overline{1}0\right] \). 표면 아래의 위상 분포는 균일하고 전체 홈의 기계적 특성은 다른 가공 방법보다 우수했습니다. 따라서 처리 모드 \( \left(01\overline{1}0\right)/\left[0001\right] \)는 6H-SiC 표면의 마이크로 나노 홈을 고효율로 처리하는 데 가장 적합한 선택입니다. , 고정밀 및 낮은 SSD. (iii) Fig. 3d, f, 가공 방향이 c와 평행할 때 -축, 팁은 초기 가공 단계에서 심하게 마모되었습니다. 가공 깊이와 재료 제거율은 다른 가공 방법에 비해 훨씬 낮고 재료 가공 비율은 약 1.0에 불과하지만 \( \left(01\overline{1}0\right)/\left[ 0001\right] \) 및 \( \left(11\overline{2}0\right)/\left[0001\right] \) 처리 모드는 \( \left(01\overline{1} 0\오른쪽)/\왼쪽[2\overline{1}\overline{1}0\right] \). 따라서 \( \left(01\overline{1}0\right)/\left[0001\right] \) 및 \( \left(11\overline{2}0\right)/를 사용하지 않는 것이 좋습니다. \left[0001\right] \) 6H-SiC 표면의 마이크로 나노 홈 가공. 그러나 이러한 모드는 우수한 내마모성을 나타냅니다. 따라서 철 금속의 초정밀 가공 분야에서 광범위한 전망을 가진 단결정 SiC 절삭 공구의 경사면에 적합합니다.
육각형 결정 시스템의 일반적인 슬립 시스템(그림 4 참조)은 주로 기저 슬립, 프리즘 슬립 및 피라미드 슬립을 포함합니다. 미끄럼 저항은 일반화된 적층 결함 에너지(GSF) 및 dE와 관련이 있습니다. GSF /dx 대 (x /b ) 슬립 시스템. 슬립 모션은 가장 밀도가 높은 평면과 가장 짧은 방향을 따라 발생합니다[10]. 기본 슬립의 우선 슬립 시스템은 기본 슬립(셔플 세트)/<\( 1\overline{1}00 \)> 및 기본 슬립(셔플 세트)/<\( 11\overline{2}0 \)>입니다. [20]. 전자는 중간 에너지 최소값이 부족하기 때문에 후자가 시뮬레이션 및 실험에서 우선합니다[20]. 따라서 본 연구에서 고려하는 슬립 모션은 기저 슬립(셔플 세트)/<\( 11\overline{2}0 \)> 및 프리즘형 슬립 및
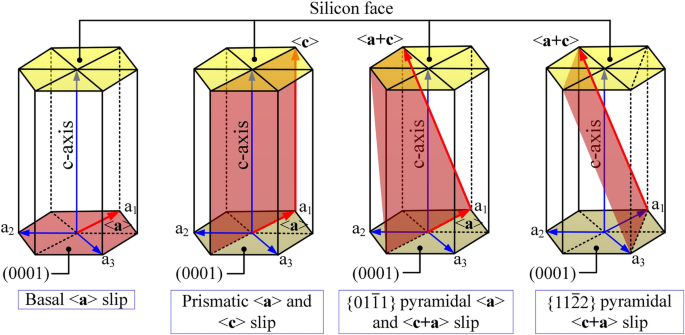
육각 시스템의 슬립 시스템
활공 평면의 전단 응력 성분 τ s 관계식으로 계산할 수 있습니다.
$$ {\tau}_{\mathrm{ss}}={\sigma}_{\mathrm{계속}}\mathit{\cos}<\overset{\rightharpoonup }{f},\overset{\rightharpoonup } {n_g}>\cos <\overset{\rightharpoonup }{f},\overset{\rightharpoonup }{t_g}>={\sigma}_{\mathrm{cont}}\bullet m $$ (1)여기서 σ 계속 는 접촉 응력, \( \overset{\rightharpoonup }{f} \)는 하중 방향, \( \overset{\rightharpoonup }{n_g} \) 및 \( \overset{\rightharpoonup }{t_g} \)는 전역 직교 좌표계의 슬립 평면 법선 및 슬립 방향, 그리고 m 슈미드 요인이다. 전역 좌표계는 고정되었고 로컬 좌표계는 수정 방향으로 회전했습니다. x 로컬 좌표계의 -축은 기본 벡터 \( \overset{\rightharpoonup }{a_1} \)와 평행한 반면 z -축은 기본 벡터 \( \overset{\rightharpoonup }{c} \)와 평행했습니다.
스크래칭 과정에서 삼각뿔 팁의 1차 접촉면은 경사면이었지만 공구가 심하게 마모되면 주요 접촉면이 경사면과 팁 탑의 복합물로 전이된다. 해당 하중 방향 \( \overset{\rightharpoonup }{f} \)은 다음과 같이 표시됩니다.
$$ \left\{\begin{array}{c}\overset{\rightharpoonup }{f_1}=\left({f}_{1x},{f}_{1y},{f}_{1z} \right)\kern8em \mathrm{rake}\ \mathrm{face}\ \\ {}\overset{\rightharpoonup }{f_2}=\left({f}_{2x},{f}_{2y}, {f}_{2z}\right)\kern9.75em \mathrm{tip}\ \mathrm{top}\end{array}\right. $$ (2)여기서 \( \overset{\rightharpoonup }{f_1}=\left(1,0,-\sqrt{2}\right) \), \( \overset{\rightharpoonup }{f_2}=\left(0,0) ,-1\right) \) 전역 좌표계에서.
육각형 결정계로서 6H-SiC의 슬립계는 {h k i l로 표현될 수 있습니다. }/ <u v t w>. 로컬 데카르트 좌표계에서 슬립 평면 법선 \( \overset{\rightharpoonup }{n_c} \) 및 슬립 방향 \( \overset{\rightharpoonup }{t_c} \)은 다음과 같이 표시됩니다.
$$ \overset{\rightharpoonup }{n_c}=\left(\frac{3}{2}h,\frac{\sqrt{3}}{2}\left(h+2k\right),\frac{ 3 la}{2c}\right) $$ (3) $$ \overset{\rightharpoonup }{t_c}=\left(u-\frac{1}{2}\left(v+t\right),\ frac{\sqrt{3}}{2}\left(vt\right),\frac{c}{a}w\right) $$ (4)전역 직교 좌표계에서 슬립 평면 법선 \( \overset{\rightharpoonup }{n_g} \) 및 슬립 방향 \( \overset{\rightharpoonup }{t_g} \)은 다음과 같이 표시됩니다.
$$ \overset{\rightharpoonup }{n_g}=T\bullet \overset{\rightharpoonup }{n_c} $$ (4) $$ \overset{\rightharpoonup }{t_g}=T\overset{\rightharpoonup }{\ 총알 {t}_c} $$ (5)여기서 전역 좌표계에서 로컬 좌표계로의 회전 행렬 형태와 해당 회전 각도는 표 3에 나와 있습니다.
식 (1)-(5)에 따르면, 하중 방향이 \( \overset{\rightharpoonup }{f_1} \) 및 \( \overset{\rightharpoonup }{f_2} \ )은 표 4와 같다. (i) 6H-SiC의 c/a 값은 4.901로 1.633보다 훨씬 크다. 따라서 기저 슬립에 필요한 임계 전단 응력은 프리즘 슬립 시스템보다 낮았다. 가공면이 기저면일 때 기저 슬립 시스템의 계수는 다른 슬립 시스템의 계수보다 높았다. 따라서 처리 모드를 \( (0001)/\left[2\overline{1}\overline{1}0\right] \) 및 \( (0001)/\left[10\overline{1 }0\right] \), 기본 슬립 모션이 먼저 발생했습니다. (ii) 처리 모드가 \( \left(01\overline{1}0\right)/\left[2\overline{1}\overline{1}0\right] \) 및 \( \ left(11\overline{2}0\right)/\left[1\overline{1}00\right] \), 로드 방향만 고려하여 \( \overset{\rightharpoonup }{f_1} \) 및 \( \overset{\rightharpoonup }{f_2} \) 이론적으로 기초 슬립이 발생하는 것은 불가능하며 프리즘 슬립 운동이 우선합니다. (iii) 처리 모드가 \( \left(01\overline{1}0\right)/\left[0001\right] \) 및 \( \left(11\overline{2}0\right)로 선택된 경우 )/\left[0001\right] \), Fig. 4와 같이 초기 가공 단계에서 tip-top이 심하게 마모되었으며 \( \overset{\rightharpoonup }{f_2} \) 긁는 과정. 따라서 슬립 모션은 전역 좌표에서 YOZ 평면과 대칭으로 분포된 프리즘 슬립 시스템에서 발생합니다.
그림 6a, b에서 \( (0001)/\left[2\overline{1}\overline{1}0\right] \) 및 \( (0001)/\left[01\overline{1 }0\right] \) 를 선택하면 슬립 시스템 \( (0001)/<1\overline{2}10> \)에서 주로 슬립 모션이 발생하는데, 이는 공구의 전진으로 인한 것입니다. 해당 슬라이딩 이동 모드는 슈미트 계수의 계산 결과와 일치합니다. 표면 아래 영역에 나노결정 입자와 격자 변형이 있었고 이러한 손상으로 인해 불규칙한 격자 왜곡 영역이 형성되었습니다. 비정질상은 가공면 전체를 덮었고 전위의 깊이는 격자왜곡층의 깊이에 가까웠다.
<그림>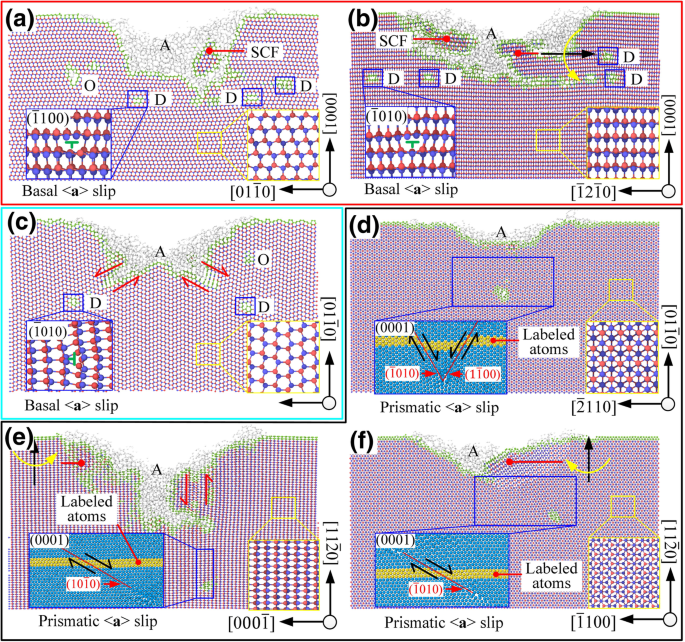
가공 영역의 단면, D 탈구, A 는 비정질 상, SCF는 단결정 형태, O 다른 유형의 결함입니다. 여기서 a –f 해당 프로세스 모드는 \( (0001)/\left[2\overline{1}\overline{1}0\right] \), \( (0001)/\left[10\overline{1}0\right입니다. ] \), \( \left(01\overline{1}0\right)/\left[2\overline{1}\overline{1}0\right] \), \( \left(01\overline{ 1}0\right)/\left[0001\right] \), \( \left(11\overline{2}0\right)/\left[1\overline{1}00\right] \), \( \left(11\overline{2}0\right)/\left[0001\right] \), 각각.
\( \left(01\overline{1}0\right)/\left[2\overline{1}\overline{1}0\right] \)를 선택하면 기저의 슈미트 계수로 < > 슬립은 0, 기본 <a와 같습니다.> 이론상 슬립이 발생하지 않아야 합니다. 그러나 하중 방향 \( \overset{\rightharpoonup }{f_1} \)과 슬립 방향 \( \left[11\overline{2}0\right] \) 사이의 각도는 5.3°에 불과했습니다. 접촉 영역과 비접촉 영역 사이의 상대 운동으로 인한 전단 작용 하에서(그림 6c 참조), 기저 <a> \( \left(01\overline{1}0\right)/\left[2\overline{1}\overline{1}0\right] \) 처리 모드에서 프리즘 슬립 전에 슬립이 발생했으며 V 홈의 양쪽에 발생했습니다. \( \left(11\overline{2}0\right)/\left[1\overline{1}00\right] \) 처리 모드에서 하중 방향 사이의 각도 \( \overset{\rightharpoonup }{f_1} \) 및 슬라이딩 방향 \( \left[1\overline{2}10\right] \) 및 \( \left[\overline{1}\overline{1}20\right] \) 각각 24.7° 및 35.3°입니다. 전단 작용은 기저면의 슬라이딩 운동을 유도하지 않았습니다. 해당 슬립 모션 모드는 슈미트 계수의 계산 결과와 일치합니다. Fig. 6e에서 보는 바와 같이 \( \left(11\overline{2}0\right)/\left[1\overline{1}00\right] \)가 선택되었을 때, 슬립 시스템 \( \left[ 1\overline{2}10\right]/\left(\overline{1}010\right) \) \( \overset{\rightharpoonup }{f_1} \) 및 \ ( \overset{\rightharpoonup }{f_2} \), 필연적으로 지하 손상층의 깊이가 깊어질 것입니다. 격자왜곡과 비정질상도 존재하나 기저면 가공과 달리 전위깊이가 격자왜곡보다 현저히 컸다. sp 3 →sp 2 지하 영역에서 발생한 전환 동작.
처리 방향이 c와 평행할 때 -축은 팁의 심한 마모로 인해 하향 압출에 의한 프리즘 슬립이 안정적인 스크래칭 단계에서 주요 슬립 모션 모드였습니다. 해당 슬립 모션 모드는 슈미트 계수의 계산 결과와 일치했습니다. \( \left(01\overline{1}0\right)/\left[0001\right] \) 가 선택되었을 때, 하중 방향이 \( \overset{\rightharpoonup }{f_2} \)인 슬립 시스템 \( \left[1\overline{2}10\right]/\left(\overline{1}010\right) \) 및 \( \left[\overline{1}\overline{1}20\right] /\left(1\overline{1}00\right) \) 동일한 슈미트 계수를 가지며, 60°의 각도로 두 슬립 표면에서 크로스 슬립이 발생하고, 이후 슬립 모션을 방해하는 핀닝 효과가 발생했습니다. . 따라서 최대 지하 손상 깊이 SSD 최대 h보다 작거나 같음 그 탄 θ /2 침대 α /2, 여기서 θ =101°는 나노그루브의 이론적인 각도이고 α =60°는 슬립 평면 \( \left(\overline{1}010\right) \)과 \( \left(1\overline{1}) 사이의 각도입니다. 00\오른쪽) \). \( \left(11\overline{2}0\right)/\left[0001\right] \)를 선택하면 슬립 시스템 \( \left[\overline{2}110\right]/\left( 0\overline{1}10\right) \) 및 \( \left[1\overline{2}10\right]/\left(\overline{1}010\right) \) 도 동일한 슈미트 계수를 가졌습니다. 그러나 슬립 모션은 팁의 불규칙한 마모에 의해 영향을 받았고 슬립 시스템 \( \left[1\overline{2}10\right]/\left(\overline{1}010\right) \)만 발생했습니다.
요약하면, Fig. 7에서 보는 바와 같이 다양한 공정 조건에서 표면 아래 영역의 손상은 주로 전위, 격자 변형(비틀림/상대 슬라이딩) 및 비정질 상이었다. 6H-SiC의 변형은 주로 슬립 운동, 재료의 비결정화 및 불규칙한 격자 왜곡에 의해 발생합니다. 주요 슬립 변형 모드는 기저 슬립과 프리즘 슬립이었으며, 이는 가공면/방향과 밀접한 관련이 있습니다.
<그림>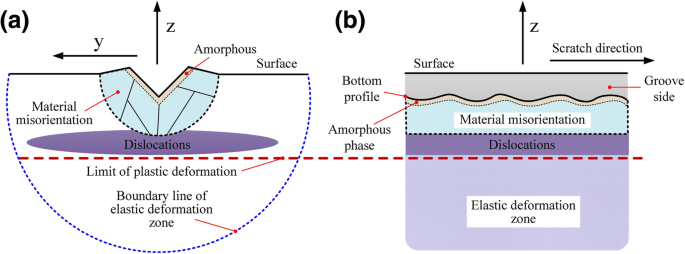
처리된 표면/지하 손상 형태 분포. 아 xy 교차 구역. ㄴ xz 단면
이 연구에서 6H-SiC의 변형 메커니즘과 나노 가공성은 결정면(가공면)/결정 방향(가공 방향)의 다양한 조합에서 조사되었으며 다음과 같은 결론이 도출되었습니다.
나노 스케일에서 긁는 과정에서 6H-SiC의 변형 메커니즘은 주로 비정질 상전이, 격자 왜곡 및 전위 슬립 운동의 조합의 결과입니다. 전위선의 깊이는 6H-SiC의 가공 영역에서 표면 아래 손상 깊이를 결정합니다.
<리> (2)기초 <a> 슬립 및 프리즘 <a> 슬립 모션은 스크래치 과정에서 6H-SiC의 슬립 변형에 지배적인 역할을 합니다. 처리 모드에 추가로 프리즘 평면/<a>, Schmidt 알고리즘을 통해 6H-SiC의 긁힘 과정에서 슬립 모션을 예측할 수 있습니다.
<리> (3)처리 모드 \( \left(01\overline{1}0\right)/\left[2\overline{1}\overline{1}0\right] \)는 높은 제거율과 낮은 연마성을 달성하는 데 도움이 됩니다. 6H-SiC 표면의 가공에 적합한 마모. 기본 평면 및 c -축은 6H-SiC의 난삭재 면과 방향으로 절삭공구 설계시 참고할 수 있다.
이 연구 동안 생성되거나 분석된 모든 데이터가 이 기사에 포함되어 있습니다.
무정형상
분석 채권 주문 가능성
탈구
변형되지 않은 칩 두께
일반화된 적층 결함 에너지
대규모 원자/분자 대량 병렬 시뮬레이터
분자 역학
금속 산화물 반도체 전계 효과 트랜지스터
수, 부피 및 에너지
기타 유형의 결함
단결정 형태
단일 포인트 다이아몬드 터닝
지하 손상 깊이
최대 지하 손상 깊이
나노물질
분무 용접이란 무엇입니까? 용사 용접은 용사 형태의 여러 용접 공정을 말합니다. 분말이나 와이어를 압축가스로 고속으로 분무하여 금속표면에 분사하는 산업활동입니다. 스프레이 용접에는 산업용 플라즈마, 화염, 폭발 총, 아크 스프레이 및 고속 산소 연료의 사용이 포함됩니다. 스패터 용접에서 발생하는 상당한 열로 인해 사람과 환경에 해를 끼치지 않도록 절차와 규정을 주의 깊게 일관되게 따라야 합니다. 관련: 용접이란 무엇입니까? 분무 용접은 어떻게 작동합니까? 열 스프레이는 다중 코팅 공정을 나타내는 일반적인 용어입니다. 전체
유리는 우리에게 아주 친숙한 소재입니다. 건물, 자동차, 광전자공학 등에 나타납니다. 그러나 유리는 사소한 이름에 불과합니다. 유리의 정체는 무엇입니까? 이 게시물에서는 유형에 대한 몇 가지 정보를 알려 드리겠습니다. 및 제조 과정 유리. 1. 유리란 무엇입니까 유리는 비결정질, 무기 및 비금속 재료입니다. 가장 오래되고 가장 친숙한 유형의 유리는 화합물 실리카에서 생산되는 규산염 유리입니다. 유리에는 광학적 투명도 기능이 있습니다. , 따라서 주로 창틀로 사용됩니다. 또한 유리는 어느 정도의경도를 가지고 있습니다. , 이는