

산업용 로봇

산업 제조
소프트웨어 워크플로를 개선하면 3D 인쇄 프로세스에서 중요한 시간을 단축할 수 있습니다. 연구원들이 RoboDK를 사용하여 적층 제조 워크플로를 개선한 방법은 다음과 같습니다.
로봇으로 3D 프린팅할 때 소프트웨어 워크플로가 생산성에 중요한 영향을 미칠 수 있습니다. 워크플로에서 몇 분이라도 단축할 수 있다면 시간이 지남에 따라 상당한 추가 생산성으로 이어질 수 있습니다.
다른 소프트웨어 패키지 간에 전환하는 데 걸리는 시간은 일반적으로 짧지만 워크플로가 원활하지 않게 되어 결과적으로 적층 제조의 효율성이 떨어질 수 있습니다.
포르투갈과 노르웨이의 연구원들은 최근 RoboDK API를 통해 RoboDK의 적층 제조 워크플로를 더욱 간소화하는 애플리케이션을 개발했습니다.
이 엔지니어링 응용 프로그램은 포르투갈 Coimbra 대학의 연구원인 Filipe Monteiro Ribeiro와 J. Norberto Pires, 그리고 노르웨이 최고의 제조 연구 센터인 SINTEF의 Amin S. Azar가 공동으로 수행한 연구를 위해 개발되었습니다.
"적층 제조 애플리케이션을 위한 로봇 제어 아키텍처 구현"이라는 제목의 연구 올해 초 Industrial Robot 저널에 게재되었습니다.
RoboDK는 적층 제조에 로봇을 추가하는 좋은 방법입니다. 우리는 이미 사람들이 3D 인쇄 콘크리트 구조물, 3D 인쇄 예술 및 3D 인쇄 음식을 포함하여 다양한 개체를 인쇄하는 데 사용하는 것을 보았습니다.
3D 프린팅 워크플로는 RoboDK에서 이미 상당히 우수합니다. 슬라이서 소프트웨어(일반적으로 오픈 소스 Slic3r)로 GCODE를 생성한 다음 결과 경로를 RoboDK에 로드하기만 하면 됩니다.
그러나 연구원 팀은 RoboDK만으로는 가능한 가장 간소화된 워크플로를 제공하지 못한다는 사실을 확인했습니다. 그들의 연구에서는 두 프로그램 간에 G 코드 파일을 수동으로 이동할 필요 없이 RoboDK와 Slic3r의 기능을 직접 결합하기 위해 개발한 프로그램을 간략하게 설명합니다.
이를 달성하기 위해 팀은 Python과 RoboDK API를 사용하여 그래픽 프로그램을 개발했습니다.
이 연구의 목표는 다음과 같습니다.
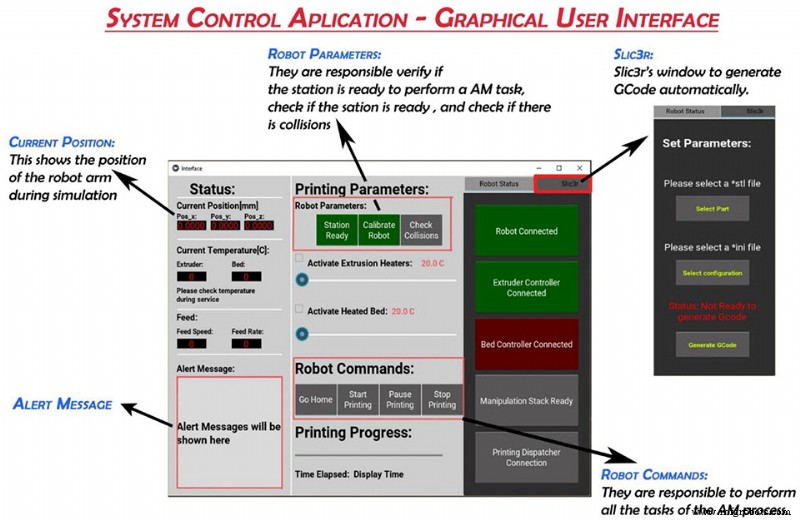
결과 프로그램은 Slic3r과 RoboDK 사이에 위치하며 적층 제조 프로세스를 조정합니다.
팀의 애플리케이션은 RoboDK의 기능을 매우 잘 활용했습니다. 특히 API를 사용하여 워크플로의 일부를 결합하는 것이 얼마나 효과적인지 보여주었습니다.
RoboDK API는 RoboDK의 매우 강력한 부분이지만 많은 사용자가 사용하지 않습니다. 이는 로봇 프로그래밍 워크플로의 부드러움을 크게 개선하는 데 도움이 될 수 있기 때문에 불행한 일입니다. 여러 프로그래밍 언어를 지원하지만 연구원들이 사용한 Python 라이브러리는 특히 사용하기 쉽습니다. 물론 Python 프로그래밍 언어가 마음에 든다고 가정하면(그리고 왜 좋아하지 않습니까? 정말 쉬운 언어입니다!)
연구의 주요 측면 중 하나는 비동기식 작업이었습니다. 팀은 프로그램의 어떤 부분도 프로그램의 다른 부분의 운영을 중단하지 않도록 하는 것이 중요했습니다.
RoboDK는 이미 비동기 방식으로 실행됩니다. 여러 Python 스크립트를 동시에 실행할 수 있으며 서로 간섭하지 않습니다. 하지만 팀은 이러한 비동기 기능도 갖추기 위해 자체 프로그램이 필요했습니다.
예를 들어, 그들은 Slic3r이 GCODE 생성을 마칠 때까지 기다릴 때 프로그램이 "중단"되는 것을 원하지 않았습니다. 프로그램이 다른 작업을 수행하는 동안 로봇을 제어할 수 있어야 했습니다. 그들은 asyncio 를 통해 이를 달성했습니다. 동시 프로그래밍에 널리 사용되는 Python용 라이브러리입니다.
연구는 로봇 연구원에 의해 수행되었지만 이것이 RoboDK API를 사용한 프로그래밍이 복잡하다는 것을 의미한다고 생각하지 마십시오. 프로그래밍 마법사가 아니어도 직접 API를 쉽게 사용할 수 있습니다.
워크플로를 향상시키기 위해 자체 프로그램을 개발하려면 다음 단계를 따르세요.
물론 워크플로를 개선하기 위해 고유한 코드를 작성할 필요는 없습니다. 또한 RoboDK와 함께 다른 프로그램을 사용할 때 워크플로를 간소화하는 SolidWorks와 같은 프로그램용 RoboDK 플러그인을 사용할 수도 있습니다.
그러나 연구원 팀이 보여주듯이 API는 아직 플러그인이 없는 소프트웨어에 대한 워크플로의 이질적인 부분을 매끄럽게 하는 데 매우 효과적일 수 있습니다.
프로그래밍 프로세스에서 몇 분 정도 시간을 줄여도 장기적으로 생산성을 높일 수 있음을 기억하십시오.
프로세스에서 API를 사용하여 무엇을 얻을 수 있습니까? 아래 의견에 알려주거나 에서 토론에 참여하십시오. 링크드인 , 트위터 , 페이스북, 인스타그램 또는 RoboDK 포럼 .
산업용 로봇
이미 린(lean) 방식으로 운영되고 있는 환경에서 어떻게 처리량과 생산성을 개선합니까? HIROTEC AMERICA는 기술 및 프로세스의 지속적인 개선(카이젠)과 혁신적인 변화(카이카쿠)를 위해 노력한다는 K2 철학에 30년을 집중한 후 동일한 질문을 했습니다. 내부 프로세스를 자세히 살펴보면 공장 내에서 비효율적인 특정 작업을 정확히 찾아낼 수 있었습니다. 기존의 사고방식을 깨뜨림으로써 그들은 자율주행차와 매니퓰레이터를 포함한 첨단 기술을 사용하여 생산과 효율성을 획기적으로 개선하고 소등 제조라는 목표를 달성할 수 있었습니다.
전통적으로 적층 제조 자동차와 같은 분야에서 사용되었습니다. , 교육 또는 아키텍처 , 무엇보다도. 그러나 이 프로젝트는 지질학의 프레임워크 내에서 개발되었습니다. . Institute of Geology의 연구 엔지니어인 Tomas Feřtek은 3D 프린팅을 사용하여 고압 챔버용 기계적 센서 마운트, 센서 본체 및 모터를 생산했습니다. 테스트의 필요성 새로운 센서, 디자인 최적화 및 수정 , 적층 제조로 이어졌습니다. 제조 속도를 높이는 3D 프린팅 , (외부 회사에 의존하지 않고) 독립적으로 이루어지며 생산 비용을 절감 C