사례 연구:Kane Robotics가 RoboDK를 사용하여 궤도 연마를 달성한 방법
로봇을 사용한 표면 마감 — 전에는 고려하지 않았을 수도 있는 애플리케이션입니다.
로봇으로 샌딩이나 폴리싱을 수행하기에 좋은 엔드 이펙터가 있습니까? 그리고 그러한 엔드 이펙터로 로봇을 프로그래밍하는 것이 얼마나 쉬운가요?
하지만 Kane Robotics의 팀은 로봇과 새로운 오비탈 샌딩 엔드 이펙터를 RoboDK와 쉽게 통합하는 방법을 찾았습니다.
어떻게 했는지 봅시다!
샌딩 및 폴리싱은 전통적으로 자동화하기 어려운 작업 유형입니다. 과거에는 작업장 공간의 절반을 차지하고 약간의 비용이 드는 자동 샌딩 기계에 큰 투자를 하거나 수동으로 작업을 수행해야 했습니다.
표면 마무리를 수동으로 수행할 때의 문제는 시간이 많이 걸리고 물리적으로 힘든 작업이며 일관성 없는 품질을 제공한다는 것입니다. 로봇을 위한 완벽한 작업 같군요!
최근 몇 년 동안 산업용 로봇을 사용한 표면 마감은 이제 실행 가능한 옵션이 되었습니다. 로봇의 엔드 이펙터에 힘 센서를 추가하면 힘 제어를 사용하여 궤도 샌딩 도구로 일관된 표면 마감을 제공할 수 있습니다.
결과적으로 산업용 로봇은 이제 항공기용 프로펠러 블레이드 연마와 같이 높은 수준의 일관성이 필요한 표면 마무리 작업에 사용할 수 있습니다.
... 이것이 바로 팀이 Kane Robotics에서 한 일입니다.
Kane Robotics를 소개합니다
Kane Robotics는 미국 캘리포니아에 본사를 둔 자동화 통합 회사입니다. 주로 항공 및 항공 우주 부문에 서비스를 제공하고 혼합/저생산 제조업체에 자동화 솔루션을 제공합니다.
그들은 회사 사명을 "혁신적이고 저렴하며 유연한 자동화 솔루션을 사용하여 시간 소모적이고 반복적인 제조 작업에서 숙련된 항공우주 인력을 해방시키는 것"이라고 설명합니다.
특히 연삭, 샌딩, 마무리, 에폭시 디스펜싱, 드릴링 및 머신 텐딩과 같은 응용 분야에서 항공우주 제조업체를 돕습니다.
회사의 프로젝트에는 항공기용 프로펠러 블레이드를 연마하는 작업이 포함되었습니다.
프로젝트:프로펠러 블레이드 연마
<동영상 자동 재생 제어 음소거 src="https://robodk.com/blog/wp-content/uploads/2021/08/Propeller-Polishing.mp4">
프로펠러 블레이드는 섬세하고 인상적인 엔지니어링 부분입니다. 그것들은 비행기가 공중에서 추력을 달성하는 주요 수단입니다. 제조 공정의 모든 실수는 항공기 추진의 비효율을 초래하거나 최악의 경우 재앙을 초래할 수 있습니다.
연마 단계는 항공기 제조에서 매우 중요합니다. 잘못된 표면 마감은 불필요한 공기 저항을 유발하고 비행기가 필요한 것보다 더 많은 연료를 사용하게 할 수 있습니다.
또한 FAA(연방항공청)에서는 프로펠러가 제조된 후 연마를 하면 블레이드 표면에 추가되는 섬세한 보호 코팅이 손상될 수 있으므로 연마를 하지 말 것을 강력히 권고합니다. 결과적으로 제조 중 연마 단계는 가장 중요한 표면 마감을 얻기 위한 마지막 순간입니다.
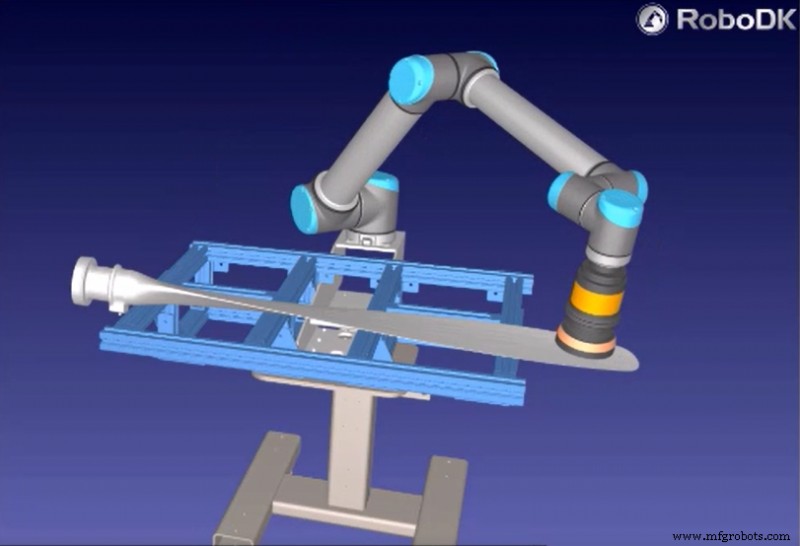
Kane Robotics의 팀은 로봇과 로봇 표면 마무리를 위해 특별히 설계된 새로운 유형의 오비탈 샌딩 엔드 이펙터를 사용하여 연마 응용 제품을 생산하기 시작했습니다.
로봇은 이 엔드 이펙터를 사용하여 프로펠러 블레이드를 정확하게 연마해야 했습니다.

RoboDK와 로봇 지원 궤도 샌더 통합
이 프로젝트를 진행하게 된 팀의 동기 중 일부는 사용 중인 새로운 오비탈 샌딩 엔드 이펙터를 테스트하는 것이었습니다.
로봇 표면 마감의 일반적인 문제는 힘 제어가 필요하다는 것입니다. 손으로 샌딩이나 폴리싱을 할 때 마감 도구가 가하는 힘을 정밀하게 제어할 수 있습니다. 로봇을 사용하여 이를 수행하는 가장 일반적인 방법은 힘 센서를 추가하고 도구에 능동적인 컴플라이언스를 프로그래밍하는 것입니다. 이것은 프로그래밍하기 어려울 수 있습니다.
Kane Robotics가 사용한 엔드 이펙터를 사용하면 규정 준수를 도구 자체에 통합하여 과거보다 로봇 표면 마감을 더 쉽게 배포할 수 있습니다.
컴플라이언트 오비탈 샌더
문제의 엔드 이펙터는 ATI의 AOV-10 Compliant Orbital Sander로, UR+ 구성 요소로도 제공됩니다.
이 새로운 도구는 로봇 샌딩을 쉽게 하도록 특별히 설계되었습니다. 공압 컴플라이언스를 궤도 샌딩 도구의 축에 통합하여 로봇이 공작물 표면의 미묘한 변화에 반응할 수 있도록 합니다.

Kane Robotics의 COO인 Alan Hiken은 다음과 같이 설명했습니다.
이와 같은 새로운 EOAT(End of Arm Tooling) 옵션과 함께 RoboDK를 사용할 때의 이점 중 하나는 이전 기사 The 5 Minute Guide to Use Any End에서 설명한 것처럼 소프트웨어 내에서 새 엔드 이펙터를 매우 쉽게 추가할 수 있다는 것입니다. RoboDK가 있는 이펙터.
하드웨어 및 소프트웨어 설정
Kane Robotics 팀이 사용한 설정은 ATI 샌딩 도구 덕분에 상당히 간단했습니다.
설정의 주요 구성 요소는 다음과 같습니다.
- 유니버설 로보틱스 협동 로봇
- ATI AOV-10 오비탈 샌딩 도구.
- 프로펠러 블레이드가 고정된 테이블입니다.
- 오프라인 프로그래밍을 위한 RoboDK
이 특정 궤도 샌더가 없었다면 팀은 외부 힘 센서를 통합해야 했을 것입니다. 이것은 하드웨어 설정과 로봇 프로그래밍의 복잡성을 증가시켰을 것입니다.
RoboDK를 사용하면 프로그래밍이 간단했습니다.
Kane Robotics가 RoboDK를 사용한 이유는 무엇입니까?
RoboDK를 통해 팀은 애플리케이션을 빠르고 쉽게 시작하고 실행할 수 있었습니다.
프로그래밍은 경로 계획 활동으로만 구성되었으며 RoboDK에서 몇 단계만 거치면 달성할 수 있습니다.
다음은 COO Alan Hiken이 RoboDK에 대해 말한 내용입니다.
RoboDK를 사용한 이유를 묻자 그는 간단히 “CAD 데이터가 있다면 왜 사용하지 않습니까?”라고 말했습니다.
우리는 거의 논쟁할 수 없습니다!
RoboDK로 어떤 애플리케이션을 달성할 수 있습니까? 아래 댓글로 알려주거나 LinkedIn, Twitter, Facebook, Instagram 또는 RoboDK 포럼에서 토론에 참여하세요.


