

산업용 로봇

산업 제조
로봇을 구매하기 전에 로봇이 작업 공간 요구 사항에 적합한지 어떻게 알 수 있나요?
모든 일반적인 사양과 측정항목을 기준으로 선택 범위를 좁혔다 하더라도 여전히 의문점이 남아 있을 수 있습니다.
로봇이 너무 커서 사용 가능한 공간에 맞지 않습니까?
작은 로봇을 사용하면 작업에 필요한 모든 영역에 도달할 수 있나요?
로봇의 크기를 가장 효율적으로 최적화할 수 있는 방법이 있습니까?
특정 로봇을 구매하기 전에는 시설에 로봇을 옆에 두는 것이 어떨지 장담하기 어렵습니다. 좋아하는 모든 YouTube 동영상을 보고, 모든 데이터시트를 읽고, 다른 사람의 시설에 있는 다른 로봇도 볼 수 있습니다…
로봇이 특정 작업에 어떻게 맞는지 확인하지 못한 채 때로는 약간의 추측 게임으로 끝날 수 있습니다. 가능한 한 많은 계산을 한 다음 희망을 가지기만 하면 됩니다.
아니면 지나치게 보수적인 선택을 하고 필요하지 않은 로봇에게 엄청난 양의 바닥 공간을 포기할 수도 있습니다.
아마도 제조용 로봇 선택 가이드를 이미 살펴보셨을 것입니다.
필요한 로봇 유형, 엔드 이펙터 및 액세서리를 식별했습니다. 페이로드와 반복성을 기반으로 로봇을 선택하도록 옵션을 좁혔습니다. 그리고 저희 도구를 사용하여 다소 합리적으로 보이는 도달범위를 선택하셨습니다.
하지만 각 로봇이 차지할 전체 공간을 아직 시각화할 수는 없습니다.
로봇의 문제는 너무 역동적이라는 것입니다.
예를 들어, CNC 기계를 사용하면 무역 박람회에서 기계로 걸어가서 작업장에서 얼마나 많은 공간을 차지할지 정확히 확인할 수 있습니다. 기계의 전체 크기는 계산하기 쉽습니다. 기본적으로 큰 직육면체입니다.
로봇이 차지하는 공간은 그리 단순하지 않습니다. 로봇 자체의 물리적 치수뿐 아니라 로봇이 움직일 때 로봇의 엔드 이펙터가 도달할 모든 위치를 포함하는 확장된 공간도 차지합니다. 이것은 로봇의 "작업 공간"으로 알려져 있습니다.
대부분의 6 DoF 산업용 로봇에는 구와 같은 작업 공간이 있습니다. Delta 로봇은 3차원 호처럼 보이는 복잡한 작업 공간을 가지고 있습니다. SCARA 로봇에는 원통형 작업 공간이 있습니다.
로봇만 보고 작업 공간이 어떻게 생겼는지 알기 어렵습니다.

고려 중인 로봇이 필요에 맞는 작업 공간을 갖도록 어떻게 보장할 수 있습니까?
고맙게도 로봇의 작업 공간을 쉽게 보고 특정 작업에 어떤 영향을 미칠지 알 수 있는 방법이 있습니다.
구매할 로봇을 선택하기도 전에 이 작업을 수행할 수 있습니다.
작업 공간 시각화는 로봇 작업 공간의 외부 한계를 3D 모양으로 시각화할 수 있는 도구입니다. RoboDK에서 이 공간은 로봇의 시뮬레이션된 모델 주위에 배치된 회색 윤곽선으로 표시됩니다.
이 기능을 사용하여 작업에 가장 적합한 로봇에 대한 결정을 알릴 수 있습니다.
응용 프로그램의 가상 목업을 만들어 작업 자체를 프로그래밍할 필요 없이 다른 로봇 모델 간에 빠르게 전환하고 작업 공간 시각화 기능을 사용하여 각 특정 로봇이 필요에 가장 적합한지 확인할 수 있습니다.
작업 공간을 기반으로 작업에 적합한 로봇을 찾으면 선택한 로봇이 실제로 작업을 수행할 수 있도록 애플리케이션을 시뮬레이터에 프로그래밍할 수 있습니다.
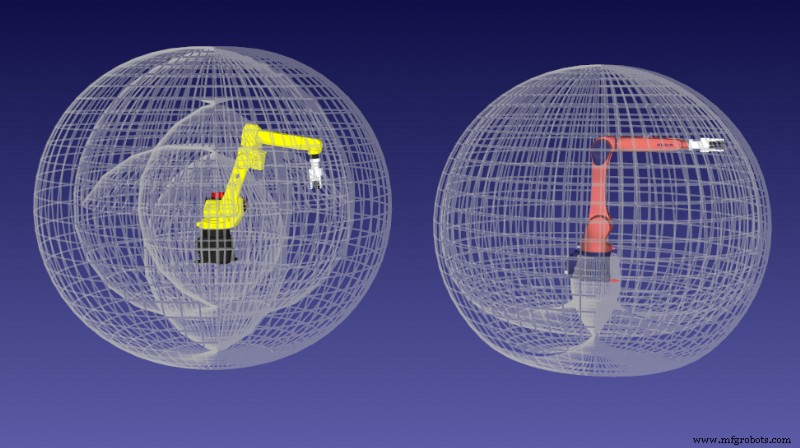
로봇의 데이터 시트를 볼 때 일반적으로 해당 로봇의 작업 공간에 대한 기본 그림 표현을 볼 수 있습니다. 일반적으로 이것은 측면에서 보는 것과 로봇의 상단에서 보는 것으로 구성됩니다.
이러한 사진은 도움이 되지만 충분히 도움이 되지 않습니다.
작업 공간 시각화는 기본적으로 이러한 그림의 3D 버전입니다. 이것은 가능한 모든 위치를 통해 로봇의 모든 관절을 알고리즘 방식으로 이동하고 엔드 이펙터의 결과 위치를 3D 모양으로 매핑하여 생성됩니다.
계산이 3D로 수행되기 때문에 로봇의 데이터시트를 보는 것보다 특정 로봇의 기능에 대해 훨씬 더 전체적인 관점을 얻을 수 있습니다.
로봇에 대한 변경 사항은 때때로 작업 공간에도 영향을 미칩니다. 예를 들어, 엔드 이펙터를 추가하면 해당 엔드 이펙터의 치수가 크기를 변경하고 때로는 작업 공간의 모양도 변경합니다. RoboDK에서 엔드 이펙터가 있거나 없는 로봇의 작업 공간을 보도록 선택할 수 있습니다.
로봇에 엔드 이펙터를 추가할 때마다 작업 공간 시각화 기능을 사용하여 로봇 작업 공간에 어떤 영향을 미치는지 확인하는 것이 좋습니다.
RoboDK를 사용하면 작업 공간 시각화를 사용하여 로봇 구매 결정을 내리는 것이 매우 쉽습니다.
특정 로봇의 작업 공간을 보는 단계는 다음과 같습니다.
물론 한 번에 한 로봇의 작업 공간만 볼 수 있는 것은 아닙니다. 여러 로봇을 시뮬레이션에 로드하고 작업 공간을 나란히 비교할 수 있습니다.
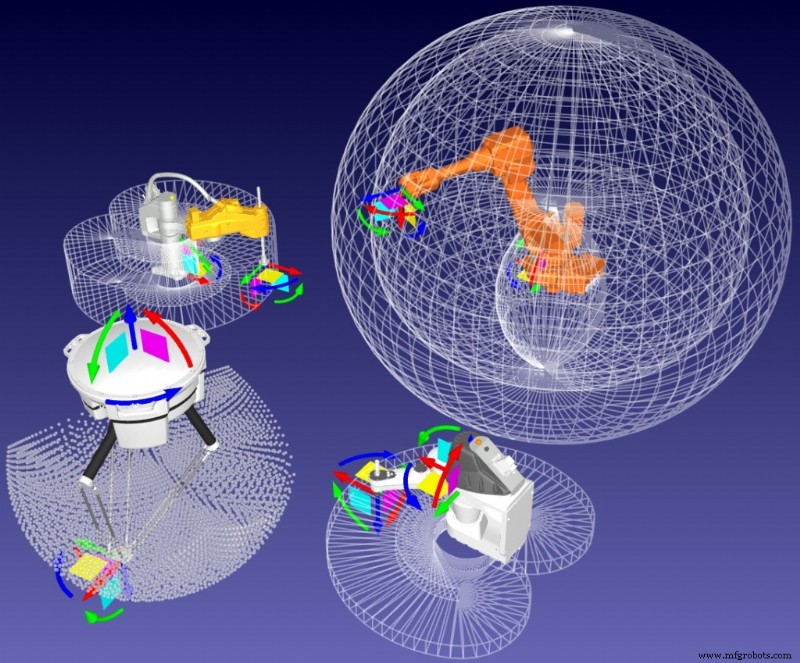
이것은 두 개의 서로 다른 로봇 모델 중에서 결정하려고 할 때 유용할 수 있습니다. 그러나 단일 작업에 여러 로봇을 사용하고 작업 공간이 상호 작용하고 겹치는 방식을 확인하려는 경우에도 유용할 수 있습니다.
작업 공간 시각화가 로봇 배포에 어떤 도움이 됩니까? 아래 의견에 알려주거나 LinkedIn, Twitter, Facebook, Instagram 또는 RoboDK 포럼에서 토론에 참여하세요.
산업용 로봇
로봇 기술은 40년 이상 제조업에 축복이었습니다. 로봇 시스템과 작업 셀을 사용함으로써 자동차 산업과 같은 산업은 그 어느 때보다 효율적으로 차량을 제작할 수 있습니다. 예전에는 수동 작업자가 하루 종일 수행해야 했던 작업을 이제 교대조의 일부로 완료할 수 있습니다. 이러한 가동 시간은 로봇의 기능에 필수적인 예방적 유지보수를 만듭니다. 이 로봇은 하루 24시간, 주 7일 최대 속도로 작동하도록 설계되었기 때문에 최소한의 유지 관리가 필요하도록 설계되었습니다. 이렇게 하면 유지 관리를 수행하는 데 필요한 가동 중지 시간이 줄어듭니
로봇 용접은 금속을 함께 접합하는 효과적인 방법입니다. 로봇은 반복적인 용접 작업에서 매우 안정적이고 효율적입니다. 로봇 용접은 용접 품질을 방해하는 변수를 제거하여 더 높은 품질의 용접을 제공합니다. 로봇 용접은 제품 제조와 관련된 수익을 늘리고 비용을 줄이는 방법입니다. 다음과 같은 잠재적 용접 문제를 제거합니다. 지속적인 로봇 프로그램 변경을 초래하는 일관되지 않은 용접 과도한 용접 번스루 용접 융합 부족 과도한 언더컷 슬래그 포획 적절한 계획, 프로그래밍 및 교육을 통해 로봇 통합은 즉각적인 이점을 제공합니다. Robo