엘라스토머 나노구조는 일반적으로 명백한 기계적 역할을 수행할 것으로 예상되므로 기계적 특성은 재료 성능에 영향을 미치는 데 중추적입니다. 다용도로 사용하려면 기계적 특성에 대한 철저한 이해가 필요합니다. 특히, 저밀도 폴리올레핀(LDPE)의 시간 의존적 기계적 응답은 완전히 해명되지 않았습니다. 여기에서 힘 부피 및 빠른 힘 부피와 함께 최첨단 PeakForce 정량적 나노기계적 매핑을 활용하여 LDPE 샘플의 탄성 계수를 시간 종속 방식으로 평가했습니다. 구체적으로, 획득 주파수는 0.1에서 최대 2kHz까지 4자리로 이산적으로 변경되었습니다. 힘 데이터는 표면 접착력을 고려한 선형화된 DMT 접촉 역학 모델에 맞춰졌습니다. 증가하는 영률은 획득 빈도가 증가함에 따라 발견되었습니다. 0.1Hz에서 11.7 ± 5.2MPa로 측정되었으며 2kHz에서 89.6 ± 17.3MPa로 증가했습니다. 또한, 크리프 컴플라이언스 실험은 순간 탄성 계수 E1 , 지연 탄성 계수 E2 , 점도 η , 지연 시간 τ 각각 22.3 ± 3.5 MPa, 43.3 ± 4.8 MPa, 38.7 ± 5.6 MPa s 및 0.89 ± 0.22 s였습니다. 탁월한 공간 해상도 이미징과 함께 기계적 측정의 다변수, 다기능 로컬 프로빙은 연질 폴리머의 정량적 나노기계적 매핑을 위한 새로운 기회를 열어주며 잠재적으로 생물학적 시스템으로 확장될 수 있습니다.
소개
고급 중합 기술의 급속한 발전으로 폴리머 형태 및 기계적 평가에 대한 관심이 증가하고 있습니다[1]. 대중적인 폴리머 종류 중 하나는 엘라스토머입니다. 엘라스토머 나노구조는 일반적으로 명백한 기계적 역할을 수행할 것으로 예상되므로 기계적 특성은 재료 성능에 영향을 미치는 데 중추적입니다. 그들은 일반적으로 속성에서 공간적, 시간적 이질성을 나타냅니다. 나노 크기의 구조와 특성이 마이크로 대응물과 연결되어 최종적으로 벌크 특성으로 이어지는 방법은 완전히 이해되지 않았습니다[2,3,4,5,6,7,8]. 다용도로 사용하려면 기계적 특성에 대한 철저한 이해가 필요합니다. 폴리올레핀 엘라스토머(PE)는 고전압 케이블[9], 나노섬유 멤브레인[10], 재사용 가능한 재료[11], 비혼화성 폴리머 시스템[12]과 같은 많은 연구 및 산업 분야에서 큰 관심을 불러일으켰습니다. 이는 나노기계적 측정을 위한 효과적이고 신뢰할 수 있는 모델 폴리머 시스템임이 입증되었습니다[13, 14]. 광범위한 적용에도 불구하고 저밀도 PE(LDPE)의 탄성 계수 측정은 여러 가지 이유로 여전히 어렵습니다[15]. 첫째, 점탄성이므로 기계적 응답이 시간에 따라 달라집니다. 둘째, 큰 표면력은 압입 과정을 복잡하게 만듭니다. 셋째, 접촉 역학을 충실하게 설명하는 강력한 모델이 부족합니다. LDPE의 기계적 특성을 측정하기 위해 압입을 사용하여 여러 연구가 수행되었습니다. LDPE의 계수를 이해하는 데 주목할 만한 발전이 이루어졌습니다. 예를 들어 온도[16], 선형 저밀도 폴리에틸렌[17], 나노 분말 혼합물[18]이 영률에 미치는 영향이 보고되었습니다. 그러나 이러한 연구의 대다수는 높은 공간 분해능이 부족하고 결과는 나노 규모에서 정량적 특성화에 대한 증가하는 관심을 만족시킬 수 없습니다. 많은 연구자들이 AFM(Atomic Force Microscopy) 기반 힘 측정과 같은 대체 기술로 눈을 돌렸습니다[1, 15].
1980년대에 발명된 직후 AFM은 샘플의 기계적 특성을 조사하는 강력한 도구로 확립되었습니다. 역사적으로 AFM은 Z 압전 위치가 램프될 때 수직 편향 변화를 추적할 수 있습니다. 해당 하중 하중 및 하중 제거 궤적이 기록됩니다(힘-변위 곡선). 힘-변위 곡선은 다른 접촉 역학 모델에 맞는 힘-거리 곡선으로 처리됩니다. 단일 위치 측정(단일 힘 램프) 또는 FV(힘 부피)라고 하는 매트릭스 배열 방식으로 수행할 수 있습니다. 기존의 힘 측정을 적용하는 것은 기기에 의해 본질적으로 제한되는 느린 샘플링 속도 때문에 시간이 많이 소요됩니다. 느린 획득 속도는 FFV(빠른 힘 볼륨)라는 새로운 방식으로 개선되었습니다. 0.1Hz에서 최대 약 200Hz까지 작동할 수 있습니다. FFV의 기본 작동 메커니즘은 전환 시 삼각형 구동 신호의 평활화에 의존하여 접근과 후퇴 사이의 빠른 전환으로 이어집니다. 전례 없는 기술 발전에도 불구하고 강제 샘플링 속도 측면에서는 여전히 개선의 여지가 있습니다. PeakForce 태핑(PFT) 기반 정량적 나노기계 매핑(PFQNM)은 고해상도 이미징 기능과 기계적 특성 매핑을 동시에 활용하는 새로운 접근 방식입니다. PFQNM은 샘플링 속도를 최대 2kHz로 끌어올려 일반 힘 볼륨을 보완합니다. 따라서 PFQNM, 빠른 힘 볼륨과 함께 힘 볼륨은 힘 로딩/언로딩 속도 측면에서 4배 크기를 구성합니다. 앞서 언급한 접근 방식은 탄성 계수를 측정하는 데 유용합니다. 영률. 그러나 샘플의 동적 기계적 거동은 거의 또는 전혀 제공하지 않습니다. 고맙게도 AFM은 크리프 컴플라이언스 실험[19]이라는 또 다른 고유한 기능을 제공합니다. 이 설계에서 AFM 프로브는 예압 힘으로 샘플 표면과 접촉하게 됩니다. 그런 다음 프로브는 고정된 적용된 힘으로 고정됩니다. 응력은 일정하지만 재료는 크리프를 겪습니다. AFM은 시간의 함수로 들여쓰기 변화를 모니터링합니다. 획득한 데이터는 모델 적합의 대상이 됩니다. 이러한 측정에서 재료의 동적 기계적 특성에 대한 풍부한 정보를 추출할 수 있습니다. 위에서 언급한 모든 기술이 함께 결합되면 연질 폴리머의 시간 의존적 기계적 특성을 효과적으로 조사할 수 있을 것으로 기대됩니다.
힘 매핑 외에도 PFT는 지형 이미징을 위한 탁월한 도구입니다[20]. PFT에서 Z 피에조는 일반적으로 0.5k–2k Hz 범위의 낮은 주파수에서 전체 프로브 홀더를 위아래로 구동합니다. 부드러운 캔틸레버의 수직 편향에 대한 직접적인 피드백을 제공하기 때문에 힘의 우수한 미세 제어를 제공합니다. 최대 상호 작용력을 성공적으로 제어하는 기능은 PeakForce 태핑이라는 이름을 얻었습니다. 또한 높은 해상도와 낮은 침습성을 유지합니다. 이러한 매력적인 특성으로 인해 PFT는 부드러운 생물학적 표본 및 폴리머 샘플의 지형 이미징에 이상적인 기술입니다. 예를 들어, 피크 힘 태핑 모드는 전도성 고분자[21]와 단일 분자의 생체 인식 이벤트[22] 사이의 접착력을 조사하기 위해 성공적으로 적용되었습니다. 현재까지 PFQNM은 경화 시멘트 페이스트[23], 살아있는 세포[24], 아밀로이드 피브릴[25], 고분자 매트릭스 합성물[26,27,28]을 포함한 광범위한 재료의 기계적 특성을 특성화하는 데 광범위한 관심을 얻었습니다. 및 다양한 폴리머[29]. 고해상도 높이 이미지도 수집되기 때문에 로컬 기계적 특성을 나노 스케일에서 샘플 지형과 연관시키는 편의성을 제공합니다.
이 연구에서 LDPE 샘플의 시간 종속 계수는 여러 접근 방식을 사용하여 평가되었습니다. 특히 램프 주파수는 0.1에서 최대 2kHz까지 개별적으로 변경됩니다. 엄격한 보정이 수행되고 데이터가 적절한 Derjaguin-Muller-Toporov(DMT) 접촉 역학 모델에 맞춰집니다. 램프 주파수가 증가함에 따라 영률이 증가하는 것이 발견되었습니다. LDPE의 동적 기계적 거동을 더 잘 이해하기 위해 크리프 컴플라이언스 실험을 수행했습니다. 순간 탄성 계수 E1 , 지연 탄성 계수 E2 , 점도 η , 및 지연 시간 τ 표준 선형 솔리드(SLS) 모델 피팅에서 추출되었습니다. 다중 매개변수 기계적 측정과 전례 없는 고분해능 지형 이미징은 LDPE와 같은 연질 폴리머의 정량적 나노기계적 매핑에 성공적으로 활용되었으며 잠재적으로 생물학적 시스템으로 확장될 수 있습니다.
자료 및 방법
자료
PeakForce QNM 샘플 키트는 Bruker Co.(Santa Barbara, CA)에서 구입했습니다. 폴리머 블렌드 샘플, 사파이어 샘플 및 팁 체크 샘플이 키트에 포함되었습니다. 폴리머 블렌드 샘플은 저밀도 폴리올레핀(LDPE)과 혼합된 폴리스티렌(PS)의 박막으로 구성됩니다. 샘플을 양면 테이프를 사용하여 금속 퍽에 장착하고 받은 대로 사용했습니다. 제작사에 따르면 PS와 LDPE(에틸렌-옥텐 공중합체)의 혼합물을 실리콘 기판에 스핀 캐스트하여 다양한 재료 특성을 가진 필름을 생성했습니다. RTESPA-150 프로브는 명목 스프링 상수가 5N/m인 Bruker Co.(Santa Barbara, CA)에서 구입했습니다. 프로브 캔틸레버의 뒷면은 레이저 편향을 향상시키기 위해 얇은 알루미늄 층으로 코팅되었습니다.
교정
Dimension ICON AFM(Bruker Co., Santa Barbara, CA)이 장착된 ScanAsyst 모드를 사용하여 보정 및 기계적 측정을 수행했습니다. 캔틸레버 편향 감도, 캔틸레버 스프링 상수 및 팁 반경에 대한 보정이 힘 램프 및 힘 볼륨에 대해 수행되었습니다. 이 연구에서는 동일한 배치의 3개의 프로브를 사용했습니다. 보정 프로토콜은 다음과 같습니다. 캔틸레버 편향 감도는 RTESPA-150 프로브를 매우 단단한 표면(이 경우 사파이어 샘플)에 가져오는 이른바 터치 보정 방식을 통해 힘 램프를 수행하여 보정되었습니다. Z에 대해 램프 출력이 선택되었습니다. 램프 크기는 200nm로 유지되었고 상대 트리거 임계값은 기준 배경보다 0.3V로 고정되었습니다. 힘 대 Z 압전 변위 곡선을 수집한 후 한 쌍의 선을 사용하여 접촉 영역의 가장 선형적인 부분을 정의했습니다. 편향 감도 업데이트를 클릭하면 편향 감도가 자동으로 보정되고 저장됩니다. 측정된 편향 감도는 44.7 ± 4.2nm/V(n =3). 다음으로 열에너지에 의한 자유 공기에서 캔틸레버의 진동 스펙트럼을 얻기 위해 열 튜닝을 수행하였다. 공진 주파수 피크는 AFM 제조업체(Bruker Co. Santa Barbara, CA)에서 제공한 실시간 NanoScope 소프트웨어에 의해 강조 표시되고 장착되었습니다. 등분할 정리 이론에 기초하여,
$$\frac{1}{2}k_{{\text{B}}} T =\frac{1}{2}kd^{2}$$ (1)
여기서 \(k_{{\text{B}}}\)는 볼츠만 상수, \(T\)는 켈빈 단위의 절대 온도, \(d\)는 캔틸레버 진동 진폭의 평균 제곱근 값입니다. 스프링 상수 \(k\)는 보정 계수 1.09를 고려하여 그에 따라 계산되었습니다. 팁 체크 샘플을 가로질러 프로브를 조심스럽게 스캔하여 팁 반경을 추정했습니다. 샘플은 일부 영역에서 끝이 뾰족한 티타늄으로 구성됩니다. 각 날카로운 끝은 팁 모양의 일부를 캡처합니다. 결국 샘플 지형 이미지를 사용하여 구로 추정되는 팁 모양을 재구성할 수 있습니다. 팁 반경을 정확하게 추정하려면 압입 깊이도 필요했습니다. 압입 깊이(18.3 ± 2.6nm, n =3)은 제로 이격과 점프 접촉의 가장 낮은 지점 사이의 거리를 측정하여 얻었다. 따라서 팁 체크 이미지의 정점에서 높이 1의 들여쓰기 값을 대체하여 유효 팁 반경을 보정했습니다.
동기 거리 및 PFT 진폭 감도는 PFQNM 기술에 고유합니다. 또한 보정해야 합니다. 동기 거리는 Z 압전이 가장 낮은 위치에 도달하는 시간 상수로 정의됩니다. PFT 진폭 감도는 디지털로 입력된 구동 신호를 물리적인 Z 압전 변위로 전송하는 스케일링 팩터라고 합니다. 정확도는 Z 피에조가 원하는 대로 움직이도록 합니다. 동기화 거리와 PFT 진폭 감도 모두 터치 보정 방식을 사용하여 사파이어 샘플에서 보정되었습니다. 특히 동기화 거리 및 PFT 진폭 감도는 주파수에 따라 다릅니다. 둘 다 개별 주파수에서 보정되었습니다. 이 작업에서는 0.125k에서 2kHz에 이르는 광범위한 주파수가 선택되었습니다.
PFQNM 정량적 나노기계적 매핑
LDPE 샘플의 정량적 나노기계적 매핑을 위해 RTESPA-150 프로브를 로드했습니다. 보정된 스프링 상수는 3.9 ± 1.4 N/m(n =3)입니다. 스캔 시 사용자는 ScanAsyst가 이미지 획득 속도(스캔 속도), 피드백 게인 및 Z 범위를 최적화하도록 자동 제어하도록 하면서 힘 설정점을 5nN으로 설정합니다. 디지털 픽셀은 이미지당 256 × 256으로 유지되었습니다. PFT 주파수는 실험 사이에 2k에서 0.125k Hz까지 다양하여 시간 종속적인 하중 및 하중 제거를 생성했습니다. 2kHz PFT 주파수에서 100nm PFT 진폭의 경우 해당 하중 부하율은 0.8mm s
−1
였습니다. . 점탄성 LDPE에 대한 Poisson의 비율은 0.35로 가정되었습니다[13]. 5 µm × 5 µm 조사 영역을 지형 및 기계적 측정과 동시에 스캔했습니다. NanoScope 컨트롤러는 기계 데이터를 계산하고 실시간 소프트웨어 채널에 표시하기에 충분한 대역폭을 가지고 있습니다. 이러한 데이터는 추가 오프라인 분석을 위해 원시 이미지로 저장되었습니다. 따라서 높이 센서, DMT 계수, 접착 맵, 인덴테이션 및 에너지 소산 채널을 포함한 많은 이미지 채널이 캡처되었습니다. 일단 LDPE와 폴리스티렌 성분이 확인되었습니다. LDPE에 대한 높은 공간 분해능 PFQNM 측정은 0.5μm × 0.5μm 스캔에서 수행되었습니다.
AFM 포스 램프 및 빠른 포스 볼륨
힘 램프 및 빠른 힘 볼륨은 캔틸레버의 수직 편향을 모니터링하면서 Z 압전 변위를 램프하여 달성했습니다. 램프 크기는 200nm였습니다. 5nN에서 낮은 트리거 힘 설정점은 램프 프로세스 동안 편향 드리프트를 배제하는 일정한 배경 빼기 메커니즘에 의해 달성되었습니다. 힘 램프 샘플링 어레이는 0.5μm × 0.5μm 영역에 걸쳐 정의되었습니다. 램프 속도는 0.1Hz, 1Hz, 10Hz, 20Hz, 61Hz 및 122Hz였습니다. 1Hz 램프 속도 및 200nm 램프 크기의 경우 해당 하중 부하 속도는 400nm s
−1
였습니다. . 0.1Hz 및 1Hz에 대해 16 × 16개의 램프 곡선이 수집된 반면 10Hz, 20Hz, 61 Hz 및 122 Hz에 대해 128 × 128개의 램프 곡선이 수집되었습니다.
크립 실험
Stargate 스캐너는 크리프 실험을 위해 보정된 드리프트입니다. RTESPA-150 프로브는 2nN에서 미리 설정된 하중 부하에 도달할 때까지 PS/LDPE 샘플의 순수한 LDPE 영역에 접촉되었습니다. NanoScope 소프트웨어의 표면 제어 기능을 통해 특정 기간(이 경우 5초) 동안 샘플에 프로브를 유지할 수 있습니다. 이 기간을 보류 세그먼트라고 합니다. 적용된 힘은 트리거 힘을 유지하여 일정하게 유지되었습니다. 보류 세그먼트에 대해 124개의 데이터 포인트가 수집되었습니다. 시간에 대한 높이 센서 및 시간에 대한 편향 오류(힘)가 모두 획득되었습니다. 무작위로 선택한 위치에서 최소 50개의 크립 곡선이 캡처되었습니다. 세 가지 독립적인 실험을 수행했습니다. 사파이어 샘플에 대해 블랭크 대조 실험을 수행했습니다. 예상대로 Z에서 눈에 띄는 변화는 관찰되지 않았습니다.
실험 설정
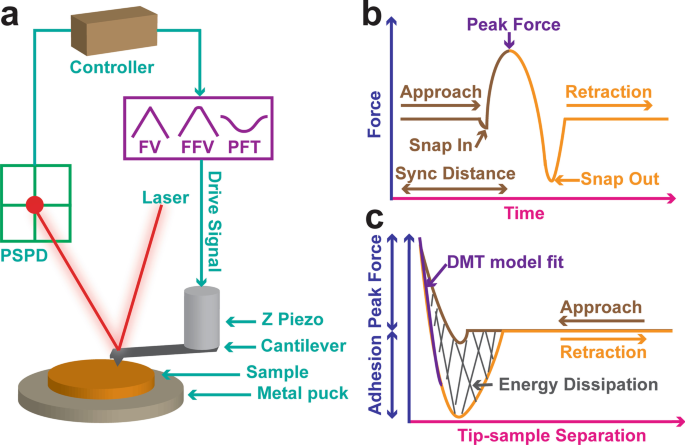
LDPE 샘플의 기계적 특성을 정량적으로 매핑하기 위해(그림 1), 예리한 캔틸레버 팁이 LDPE 샘플에 움푹 들어가고 미리 설정된 힘 하중이 달성되었을 때 샘플 표면에서 물러나는 방식으로 실험을 설계했습니다(그림 1). 그림 1a). 위치 감지 포토다이오드(PSPD)에서 수직 편향 신호를 감지하여 힘을 기록했습니다. 캔틸레버 운동은 Z 피에조 운동에 의해 구동되었습니다. 기술 선택에 따라 구동 신호는 삼각파(FV), 모서리 둥근 삼각파(FFV) 또는 사인파 신호(PFQNM)가 될 수 있습니다. PFQNM은 그림 1b에 도식적으로 그려져 있으며, 힘 대 시간 곡선은 샘플 표면에 접근할 때 팁이 스냅인 접촉을 겪고 샘플 표면에서 멀어질 때 접촉이 스냅아웃됨을 명확하게 보여줍니다. 동기 거리는 후퇴 곡선에서 접근 곡선을 분리하는 전환점을 정의했습니다. 단단한 표면에서 이 점은 Z 피에조가 가장 낮은 위치에 도달했을 때의 시간 상수였습니다. 또한 힘이 최대 힘에 도달했을 때를 의미했습니다. 대조적으로, 부드러운 순응성 샘플에서는 시간에 따른 샘플 변형으로 인해 이 지점이 약간 이동할 수 있습니다. 채택된 기술에 관계없이 AFM은 힘 대 Z 변위 곡선을 기록하고 힘 대 팁-샘플 분리 곡선으로 추가 변환되었습니다(그림 1c). 후퇴 곡선의 접촉 부분은 아래에 설명된 선형화된 DMT 모델에 맞춰지고 DMT 모듈러스가 추출되었습니다. 에너지 손실은 히스테리시스 루프를 통합하여 계산되었습니다. 적절한 스프링 상수를 가진 캔틸레버를 신중하게 선택하여 캔틸레버 팁이 샘플에 인덴트할 수 있지만 충분한 힘 감도를 갖습니다. 반면에 가해지는 응력도 접촉 면적에 따라 달라지기 때문에 팁 반경도 고려해야 합니다. 이러한 점을 고려하여 RTESPA-150 프로브가 선택되었습니다. 샘플에 들여쓰기에 적절한 양의 힘을 생성하면서도 동시에 높은 힘 감도를 유지하기 때문입니다.
<그림>
AFM 힘 램프의 메커니즘, 실험 설계, 데이터 수집 및 해석. LDPE 샘플을 금속 퍽에 장착했습니다. 예리한 캔틸레버 팁이 LDPE 샘플에 움푹 들어가고 미리 설정된 힘에 도달하면 뒤로 물러납니다(a ). 위에서 빛을 낸 레이저가 캔틸레버의 뒷면에서 맞고 빗나갔다. 편향 신호는 PSPD(위치 감지 광다이오드)에 의해 수신되었습니다. 캔틸레버 운동은 부착된 Z 피에조에 의해 구동되었습니다. 기술 선택에 따라 구동 신호는 삼각파(FV), 모서리 둥근 삼각파(FFV) 또는 사인파(PFQNM)가 될 수 있습니다. PFQNM 힘 측정은 b에 개략적으로 표시되어 있습니다. , 힘 대 시간 플롯은 팁이 샘플 표면에 가까워질 때 스냅인 접촉을 겪고 샘플 표면에서 멀어질 때 접촉이 스냅아웃됨을 명확하게 보여줍니다. 동기 거리는 높이 센서가 가장 낮은 위치에 도달한 시간 상수입니다. 힘 대 Z 변위 곡선(F-Z)은 AFM에 의해 기록되었고 힘 대 팁-샘플 분리(F-D) 곡선(c ). 후퇴 곡선의 접촉 부분을 DMT 모델과 피팅하여 DMT 모듈러스를 추출했습니다. 히스테리시스 루프에 대한 통합을 에너지 소산이라고 합니다.
데이터 분석
오프라인 데이터 분석은 AFM 공장에서 제공하는 NanoScope Analysis 소프트웨어(Bruker Co., Santa Barbara, CA)를 사용하여 수행되었습니다. 모든 지형 이미지는 Z 피에조 드리프트, 배경 노이즈를 제거하고 샘플 기울기를 수정하는 1차 평탄화 작업을 거쳤습니다. 표면 거칠기는 NanoScope 분석 소프트웨어에서 제공하는 표면 거칠기 기능으로 평가되었습니다.
여기서 \(N\)은 이미지 영역 내의 총 점 수이고 \(Z_{{\text{i}}}\)는 i의 \(Z\) 높이입니다. th 데이터 포인트이고 \(Z_{{\text{m}}}\)는 전체 영역에 대한 평균 \(Z\) 높이입니다. 모든 기계 데이터 이미지는 레벨링 없이 그대로 유지되었습니다.
힘 램프, 빠른 힘 볼륨 및 PFQNM 모두 Z 압전 변위(F-Z) 곡선에 대한 힘을 산출했습니다. 힘 대 팁-시료 분리(F-D) 곡선은 물리적으로 더 의미가 있으며 모델 적합에 요구됩니다. Z 변위는 세 가지 구성요소, 즉 팁-샘플 분리(D ), 캔틸레버 편향(d ) 및 들여쓰기 깊이(\(\delta\)). F-Z를 F-D로 변환하려면 캔틸레버 편향을 빼야 합니다(d ) 및 Z 변위에서 들여쓰기 깊이(\(\delta\)). 캔틸레버 편향 감도와 스프링 상수가 보정된 상태에서 실시간 제어 소프트웨어 또는 오프라인 데이터 분석 소프트웨어에서 수행할 수 있습니다. 또한 힘 곡선 기준선을 0으로 오프셋하기 위해 기준선 보정 기능을 실행했습니다. 마지막으로, F-D 곡선이 얻어지고 DMT 모델 적합이 적용됩니다. Hertzian 접촉 이론에 따르면,
$$F_{{{\text{appl}}}} =\frac{4}{3}E_{r} \sqrt R \delta ^{{\frac{3}{2}}} + F_{{{ \text{adh}}}}$$ (3)
여기서 \(F_{{{\text{appl}}}}\)는 팁이 샘플에 적용된 힘입니다. 접착력(\(F_{{{\text{adh}}}}\))이 고려됩니다. \(R\)은 추정된 구 팁의 팁 반경입니다. \(\delta\)는 들여쓰기 깊이입니다. \(E_{{\text{r}}}\)는 감소된 영률입니다. 팁 및 샘플의 계수와 관련이 있습니다.
여기서 \(v_{{\text{s}}}\) 및 \(v_{{\text{t}}}\)는 각각 샘플과 AFM 팁의 푸아송 비율입니다. \(E_{{\text{s}}}\) 및 \(E_{{\text{t}}}\)는 각각 샘플 및 원자현미경 팁의 영 계수입니다. 팁의 영률은 LDPE 샘플보다 몇 배 더 크므로 팁 항은 무시할 수 있습니다. \(E_{{\text{r}}}\) 및 \(v_{{\text{s}}}\)가 알려지면 \(E_{{\text{s}}}\) 계산됨.
식의 양변을 취함으로써 (3) \(F_{{{\text{appl}}에서 \(F_{{{\text{adh}}}}\)를 뺀 후 \(\frac{2}{3}\) 거듭제곱 }}\), 모든 힘 데이터를 맞추기 위해 선형화된 모델이 사용되었습니다[30]. 이 모델은 접점 식별이 필요하지 않습니다.
여기서 F 총 하중, k1 그리고 k2E의 탄력성 1 및 E2 , 각각. η 대시팟의 점도를 나타냅니다. 팁-샘플 상호작용 영역은 단일 점이 아니라 유한 영역이기 때문입니다. 응력, 변형률 및 계수 측면에서 방정식을 다시 작성하여 모델을 개선할 수 있습니다. 이 연구에서는 Lam과 동료들이 개발한 방법을 채택했습니다. 유사한 방정식은 다음과 같습니다.
여기서 ε (그 )는 함수 시간으로 변형률을 나타냅니다. σ 스트레스다. 이1 및 E2 는 각각 순간 탄성 계수와 지연 탄성 계수입니다. η 대시팟의 점도를 나타냅니다. 또한 스트레스 σ 및 변형률 ε 모듈러스 E와 관련이 있습니다. 또는 규정 준수 D 다음 관계에 의해.
를 사용하여 파생될 수 있습니다. $$\tau =\frac{\eta }{{E_{2} }}$$ (14)
지연 시간은 ~ 63%의 크리프가 발생한 시간이라고 합니다.
모든 힘 측정은 세 번 반복되었습니다. 결과는 Mean ± SD(표준편차)의 형태로 보고되었으며 독립적인 실험의 수는 n으로 표시되었습니다. =3.
<섹션 데이터-제목="결과">
결과
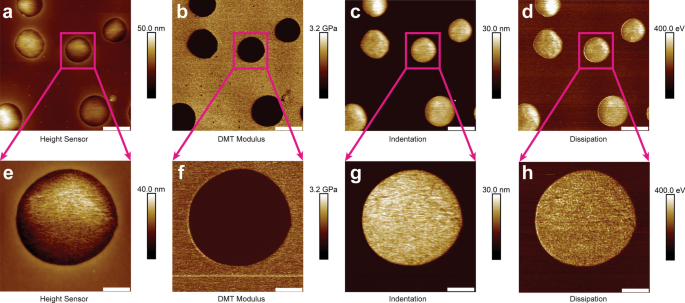
PFQNM의 효과와 정확성을 평가하기 위해 5μm × 5 μm의 대규모 조사 스캔이 수행되었습니다. 2kHz에서 PS/LDPE 혼합 샘플의 대표적인 PFQNM 이미지가 그림 2에 조립되었습니다. 그림 2a-d는 높이 센서 이미지, DMT 모듈러스 채널, 압입 채널 및 에너지 소산 채널입니다. 평평한 영역은 PS 구성 요소이고 팽창 영역은 LDPE입니다(그림 2a). 측량 스캔이 완료되면 AFM은 LDPE 영역을 물리적으로 확대하고 고해상도의 작은 크기(1.3μm × 1.3μm) 스캔을 수행하라는 지시를 받았습니다. 해당 이미지 채널은 그림 2e–h에 표시되었습니다.
<그림>
2kHz에서 PS/LDPE 혼합 샘플의 대표적인 PFQNM 나노기계적 매핑(5μm × 5μm). 패널 a –d 높이 센서 이미지, DMT 모듈러스 채널, 인덴테이션 채널 및 에너지 소산 채널입니다. 이미지 a의 경우 –d , 눈금 막대는 1µm를 나타냅니다. 측량 스캔이 완료되면 AFM은 LDPE 영역을 물리적으로 확대하고 고해상도 소형(1.3μm × 1.3μm) 스캔을 수행하도록 안내됩니다. 해당 이미지 채널은 패널 e–h에 표시됩니다. . 스케일 바는 패널 e의 경우 260nm를 나타냅니다. –h
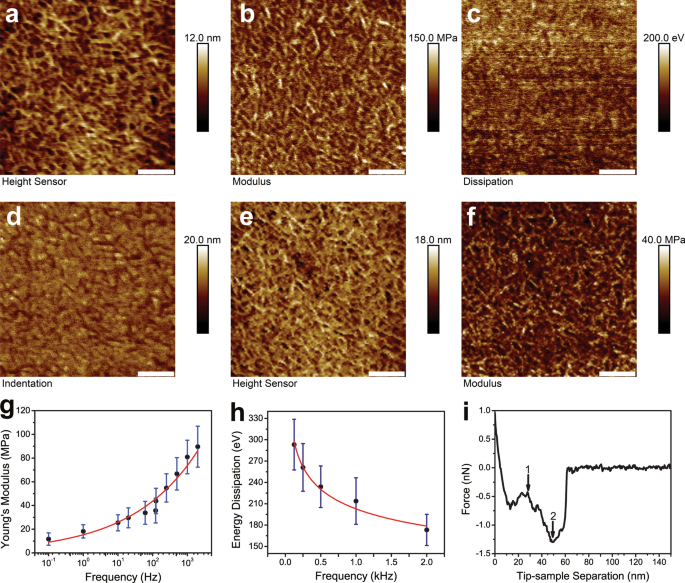
다음으로, PFQNM, FV 및 FFV는 0.5μm × 0.5μm의 순수한 LDPE 영역에 대해 수행되었습니다. 2kHz에서 PFQNM의 대표적인 세트가 그림 3a-d에 수집되었습니다. 여기에는 높이 센서, 모듈러스 매핑, 에너지 소산 및 들여쓰기가 포함됩니다. 높이 센서 이미지의 표면 거칠기는 2.58 ± 0.35nm로 \(R_{{\text{q}}}\) 형식으로 보고되었습니다. 122Hz에서 FFV의 또 다른 대표적인 세트는 그림 3e, f에 나와 있습니다. FV 및 FFV에 대한 에너지 소산 및 들여쓰기 채널이 없음에 유의하십시오. 다른 주파수에서 탄성 계수는 함께 풀링되었습니다(그림 3g). 영률 데이터는 표 1에 보고되었습니다. 0.1 Hz, 1 Hz, 10 Hz, 20 Hz, 61 Hz, 122 Hz, 125 Hz, 250 Hz, 500 Hz, 1 k Hz 및 2±.7Hz 에서 영률은 1이었습니다. 5.2MPa(n =3), 18.2 ± 5.6MPa(n =3), 25.4 ± 6.8MPa(n =3), 29.6 ± 8.4MPa(n =3), 33.8 ± 9.7 MPa(n =3), 35.7 ± 10.5MPa(n =3), 43.8 ± 10.7MPa(n =3), 54.8 ± 11.9MPa(n =3), 66.7 ± 13.6MPa(n =3), 80.9 ± 14.2MPa(n =3), 89.6 ± 17.3MPa(n =3), 각각. 산점도는 Origin 8.5 소프트웨어로 생성되었습니다. 데이터는 \(E =15.31 \times f^{{0.23}}\) (\(R^{2}\) =0.96)을 산출하는 거듭제곱 함수로 피팅되었습니다. 에너지 소산과 다른 매핑 주파수 사이의 관계는 그림 3h에 표시되어 있습니다. 2kHz, 1kHz, 0.5kHz, 0.25kHz, 0.125kHz에서 얻은 에너지 소실 값은 173.2 ± 21.9eV(n =3), 213.8 ± 32.7eV(n =3), 233.9 ± 29.3eV(n =3), 261.1 ± 33.5eV(n =3), 293.2 ± 35.6eV(n =3), 각각. 데이터를 거듭제곱 함수로 피팅하여 \(E_{{{\text{diss}}}} =202.83 \times f^{{ - 0.18}} ~\) (\(R^{2}\) =0.97 ). 대표적인 F-D 곡선은 LDPE 샘플 표면에서 AFM 팁의 두 가지 뚜렷한 파열을 보여줍니다(그림 3i). 다중 파열의 발생은 0.1~1Hz의 낮은 주파수에서 더 자주 발생했습니다.
<그림>
다른 주파수에서 매핑된 LDPE 샘플의 기계적 특성. 패널 a –d 순수 LDPE 영역에서 2kHz에서 PFQNM으로 캡처한 높이 센서 이미지, DMT 모듈러스 채널, 에너지 소산 및 들여쓰기 채널이었습니다. 높이 센서 이미지의 표면 거칠기는 2.58 ± 0.35nm로 \(R_{{\text{q}}}\) 형식으로 보고되었습니다. 패널 e와 f는 순수 LDPE 영역에서 122Hz에서 FFV로 캡처한 높이 센서 이미지 및 DMT 모듈러스 채널입니다. 이미지 a의 경우 –f , 축척 막대는 100nm를 나타냅니다. 측정된 영률 간의 관계(E ) 및 힘 매핑 빈도(f )는 g로 표시되었습니다. . 서로 다른 주파수에서 측정된 영률은 표 1에 정리되어 있습니다. 데이터는 제곱 함수로 피팅되어 다음을 산출했습니다. \(E =15.31 \times f^{{0.23}}\) ). 에너지 소실(E디스 ) 및 다른 매핑 빈도(f ) 패널 h에 표시됨 . 에너지 손실 값은 2 kHz에서, 1 kHz에서 0.5 kHz에서 0.25 kHz 및 0.125 kHz의 173.2 ± 21.9 eV의 각각 213.8 ± 32.7 eV로, 233.9 ± 29.3 eV로, 261.1 ± 33.5 eV로, 293.2 ± 35.6 eV로를이었다 얻어. 데이터를 거듭제곱 함수로 피팅하여 \(E_{{{\text{diss}}}} =202.83 \times f^{{ - 0.18}} ~\) (\(R^{2}\) =0.97 ). A representative F-D curve showed two distinct ruptures of AFM tip from LDPE sample surface (panel i ). The occurrence of multiple ruptures took place more frequently at lower frequencies, i.e. 0.1–1 Hz
Lastly, creep compliance measurement was carried on a neat LDPE region of the PS/LDPE sample. The working principle of AFM creep experiment was illustrated in Fig. 4a. Initially, the AFM tip was brought into contact with sample surface until the predefined force setpoint was reached. The tip was sthen held onto the sample for a certain time period, during which the force was kept constant. Following that, the tip was retracted. In the hold segment, the AFM recorded the change in Z motion. The change in indentation depth as a function of time (Fig. 4b) could be fitted with Voigt version of SLS model using Eq. (13). A representative creep curve was shown in Fig. 4c. The black curve was the data while the red solid line was the fitting curve. The inset indicated the Voigt version of SLS model, featuring a spring (E1 ) in series with a spring (E2 )-dashpot (η ) Voigt element in parallel. The experiment showed that instantaneous elastic modulus E1 , delayed elastic modulus E2 , viscosity η , retardation time τ were 22.3 ± 3.5 MPa, 43.3 ± 4.8 MPa, 38.7 ± 5.6 MPa‧s and 0.89 ± 0.22 s, respectively. The data were tabulated in Table 2.
Creep compliance measurement on a neat LDPE region of the PS/LDPE sample. The working principle of AFM creep experiment was illustrated in panel a . Initially, the AFM tip was brought into contact with sample surface till it reached the predefined force setpoint. The tip was then held onto the sample for a certain time period, during which the force was kept constant. Following that, the tip was retracted. In the hold segment, the AFM recorded the change in Z motion (panel b ). The change in indentation depth as a function of time could be fitted with Voigt version of SLS model using Eq. (13). A representative creep curve was shown in panel c . The black curve was the data, while the red solid line was the fitting curve. The inset indicated the Voigt version of SLS model, featuring a spring (E1 ) in series with a spring (E2 )-dashpot (η ) Voigt element in parallel
토론
In the present study, a comprehensive powerful nanomechanical mapping approach for polymer samples has been developed by incorporating a number of nanoscale AFM based force measurements. The approach allows simultaneous high-resolution topography imaging and quantitative nanomechanical mapping. Local mechanical behavior can be correlated with sample topography. More importantly, the time dependent mechanical response of soft viscoelastic materials has been successfully mapped out. The Hertz model is a widely received contact mechanics model [31], in which the scenario when a rigid probe indents a semi-infinite, isotropic, homogeneous elastic surface is described. However, the Hertz model assumes no surface forces, which is not true for soft materials. To overcome this shortcoming, the Johnson–Kendall–Roberts (JKR) model and the DMT model have been developed. Given the setup in this study, the DMT model can be implemented as there are high elastic modulus, low adhesion, and small tip radius involved where long rang surface forces exist. The force setpoint at 5 nN has been empirically obtained, and justified to be the optimum value in terms of getting meaningful indentation depth while the DMT model still holds. Low force load also gives rise to sample deformation in elastic regime not plastic regime. In addition, sharp tip enables high resolution sample topography imaging in PFQNM measurements, which is an attractive advantage when correlates sample topography with mechanical properties.
Tip radius estimation is not trivial in quantitative mechanical measurements. Many researches estimate the tip radius by backward calculation using a sample with known modulus [29, 32]. This work adopts a different reconstruction strategy that does not require such a sample. It has been documented that using blunt tips tend to yield tighter modulus numbers and that sharp tips may overestimate the modulus. However, sharp tips preserve high spatial resolution, an advantage not possessed by other techniques. Polymer fibrils are clearly seen (see a 0.5 µm × 0.5 µm scan in Fig. 3). Sharp tips, even under small load, can penetrate into compliant samples due to large stress, resulting in large indentation. Therefore, it could compromise the validity of the DMT model. That is not the case in this study as the applied force is controlled in a precise and sensitive manner, evidenced by the resulted indentation depth and the effective tip radius in the same order of magnitude (22.5 ± 3.2 nm, n =3). Surface roughness (\(R_{{\text{q}}}\)) of the LDPE height image is 2.58 ± 0.35 nm, indicating the surface is flat and surface roughness should not be treated as a confounding factor to quantitative measurements [33]. In addition, the linearized DMT model fit does not require determination of the contact point that could otherwise lead to major errors in the final calculated modulus [34]. Taken together, the current experiment setup fulfills the DMT model.
To evaluate the effectiveness of PFQNM, the PS/LDPE sample has been scanned at large size. The survey scan shows LDPE has higher adhesion than PS (Fig. 2b), suggesting LDPE is stickier. AFM tip indents deeper in LDPE than in PS (Fig. 2c), indicating LDPE is softer than PE. The determined Young’s moduli for LDPE and PS are about 90 MPa and 2.5 GPa, respectively. The PS region is a little stiff for RTESPA-150 probe to indent, thus the measured modulus tends to be higher than the nominal value. Both PFQNM and FFV generate high resolution topography and modulus images (c.f. Fig. 3a, b, e, f). It is noteworthy that FFV requires reasonable data acquisition time, although it is not as impressive as PFQNM but much faster than traditional force ramp. Energy dissipation is an observable that explicitly demonstrates how much energy loss per tapping cycle (Fig. 3h). The more viscoelastic of the material, the more energy loss it incurs. The energy dissipation map demonstrates that AFM probe loses more energy on LDPE than on PS, implying LDPE is viscoelastic and response time plays an important role. The relaxation function for the power-law rheology model is described as \(\varphi =E_{{\text{a}}} \left( {\frac{t}{{t_{0} }}} \right)^{{ - \gamma }}\) [35], where E아 is the apparent Young’s modulus at time t0 , is the power-law exponent γ 그리고 t0 is a timescale factor which is set to 1 s. The dimensionless number γ characterizes the viscoelastic behavior of the material, with γ = 0 for purely elastic solid and γ = 1 for purely Newtonian fluid [36]. Current study indicates LDPE has more elastic behavior than viscous counterpart. Figure 3i exhibits an interesting finding in FV experiments that a force curve harboring two rupture events. The multiple rupture events occur more frequently in lower frequencies, i.e. 0.1–1 Hz. It is conceivable that with lower frequency, the tip dwells longer on sample surface that results in forming stronger bonds. When tip is retracted, the slower motion of tip would break the bonds at lower speed, providing the chance of being captured by AFM [37]. On the contrary, when performed at higher frequencies, weaker bonds are formed due to short dwell period and AFM is not capable of capturing transition rupture events due to poor temporal resolution. Another plausible explanation is that the combination of force exerted and longer interaction time on sample induces polymer chain conformation change, as reported previously that force induces rotation of carbon–carbon double bonds [38]. With piconewton force sensitivity and sub-nanometer distance accuracy, F-D curves not only reveal the strength of the formed bonds but also shed insights into the elastic properties and conformational changes. It was documented that at low forces (< 100 pN) and large forces (> 300 pN) the mechanical behavior of polymer chains is majorly affected by its entropic elasticity and enthalpic elasticity, respectively [39].
To further investigate the time dependent mechanical response of LDPE, creep compliance experiment has been carried out on the premise that the closed-loop scanner has been drift calibrated. Experimental data show that instantaneous elastic modulus E1 , delayed elastic modulus E2 , viscosity η , retardation time τ are 22.3 ± 3.5 MPa, 43.3 ± 4.8 MPa, 38.7 ± 5.6 MPa s and 0.89 ± 0.22 s, respectively (Table 2). This set of values for creep behavior is close to those reported for polyurethane nanocomposites [40] and syndiotactic polypropylene [41] and higher than those for bacterial biofilm [19] and live cells [36, 42]. While large AFM indenter platform measures elastic modulus of soft samples in an ensemble way, it does not enjoy high spatial resolution of elasticity. Such local mechanical properties are critical for some specimen. For instance, cell membranes are composed of various substructures like cytoskeleton, filament network and microvilli, each has varying elasticities [30]. A recent paper has studied the elastic modulus of fibroblast cells in the frequency range of 0.3–250 Hz [43]. The authors have discovered raised apparent Young’s modulus when ramp frequency increased, consistent with the observations of current study. The approaches reported here are as reliable as any other nanomechanical techniques provided the force-indentation has been prudently designed and the data analysis has been carefully executed. The PFQNM measurement is particularly helpful due to its localized correlation of sample topography with mechanical behavior. It is advantageous in terms of local non-destructive probing of mechanical properties over traditional instrumented indentation, where large probe tip is used and large destructive force is applied. Furthermore, the AFM creep experiment provides dynamic mechanical behavior at nanoscale. The methodology presented here offers multiparametric, multifunctional probing of mechanical measurement along with exceptional high spatial resolution. It has been successfully exploited for quantitative nanomechanical mapping of soft polymers such as LDPE, and can potentially be extended to complex biological systems [43,44,45].
결론
Utilizing state-of-the-art PFQNM as well as with FV and FFV, the power-low rheology of a LDPE sample has been evaluated in a time-dependent fashion. Specifically, rigorous calibrations are done. Force data are fitted with a linearized DMT contact mechanics model considering surface adhesion force. Elastic Young’s modulus was measured at frequencies spanned four orders of magnitude. Increased Young’s modulus was discovered with increasing acquisition frequency. The Young’s modulus is 11.7 ± 5.2 MPa at 0.1 Hz but increases to 89.6 ± 17.3 MPa at 2 kHz. The acquisition frequency dependent modulus change could be described by a power function \(E =15.31 \times f^{{0.23}}\) (\(R^{2}\) = 0.96). Energy dissipation in the range of 0.125–2 kHz further supports this observation. Furthermore, creep compliance experiment shows that instantaneous elastic modulus E1 , delayed elastic modulus E2 , viscosity η , retardation time τ are 22.3 ± 3.5 MPa, 43.3 ± 4.8 MPa, 38.7 ± 5.6 MPa‧s and 0.89 ± 0.22 s, respectively. The multiparametric, multifunctional local probing of mechanical measurement along with exceptional high spatial resolution imaging open new opportunities for quantitative nanomechanical mapping of soft polymers, and can potentially be extended to biological systems.
데이터 및 자료의 가용성
현재 연구 중에 사용되거나 분석된 데이터 세트는 합당한 요청이 있는 경우 교신저자에게 제공됩니다.