

산업용 로봇

산업 제조
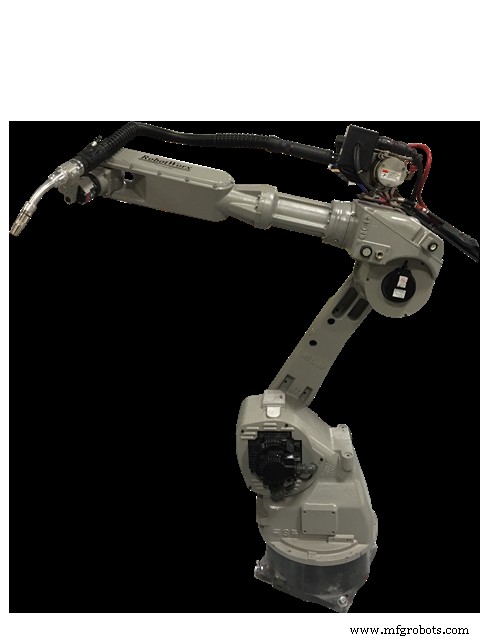
Motoman UP20은 전 세계 많은 공장에서 사용되는 복잡한 로봇 시스템입니다. UP-20은 S, L, U, R, B 및 T축이라는 이름이 지정된 여러 축(베이스에서 시작)으로 구성됩니다. 그러나 특정 핵심 구성 요소가 없으면 이러한 금속 조각은 아무데도 가지 않습니다. 손목 조립품, 타이밍 벨트, 각 축의 감속기, 내부 배선 및 서보 모터도 있습니다.
부품 번호 HW9170593인 손목 어셈블리는 모든 로봇의 팔 끝 도구가 부착되는 곳입니다. 이것은 EOAT가 이동성을 얻는 곳이며 로봇이 응용 프로그램을 제대로 수행하려면 HW-917-0593을 배치하는 것이 중요합니다.
R, T 및 B용 타이밍 벨트(각각 부품 번호 60S4.5M414, 60S4.5M518 및 60S4.5M729)는 로봇의 연동에 필수적입니다. 이 타이밍 벨트는 모터에서 축으로 동력을 전달하여 축이 적절하게 움직일 수 있도록 합니다.
각 축에는 감속기가 있습니다. S축, 부품 번호 HW9381611-B; L축, 부품 번호 HW9381611-A; U축, 부품 번호 HW9280880-A; R축, 부품 번호 HW9380623-A; B축, HW9381633-A; 및 T축, 부품 번호 HW9381631. 감속기는 기본적으로 이름에서 알 수 있듯이 로봇의 서보 모터 출력 속도를 줄입니다. 이를 통해 각 모터의 토크를 높이고 로봇이 보다 효율적으로 작동하도록 도울 수 있습니다.
Motoman UP 20에는 내부 배선(부품 번호 HW9171682-A 및 HW9371168-A)이 있어 로봇의 전체 작동에 필수적입니다. 로봇에 전원을 공급할 뿐만 아니라 배선을 통해 로봇을 두뇌인 로봇 컨트롤러에 연결합니다. 전기와 명령을 지시하는 내부 배선이 없으면 움직임이 없을 것입니다.
각 축의 움직임을 제어하는 서보 모터도 있습니다. S축 AC 서보 모터, 부품 번호 HW9381363-A; L축 AC 서보모터, 부품 번호 HW9381717-A; U축 AC 서보모터, 부품 번호 HW9381360-A; 및 R-B- 및 T-축 AC 서보 모터, 부품 번호 HW9381370-A. AC 서보 모터는 로봇의 다른 부분에서 피드백을 증폭하고 수신할 수 있는 장치가 있다는 점을 제외하면 AC 모터와 유사합니다. 이러한 모터는 로봇 축의 회전에 매우 중요합니다.
보시다시피 Motoman UP-20은 동일한 목표를 향해 함께 작동하여 공장의 생산성을 향상시키는 많은 부품이 있는 복잡한 기계입니다. 그리고 RobotWorx는 UP 20을 사용하여 시스템을 설계하는 데 도움이 되는 로봇 통합자입니다. Motoman UP20 로봇 시스템 구매에 관심이 있거나 현재 시스템에 위의 부품 중 하나가 필요한 경우 RobotWorx는 당신의 원 스톱 상점. 오늘 온라인 또는 877-762-6881번으로 문의하세요.
산업용 로봇
동급 최고 속도의 강력한 로봇을 찾고 있고 뛰어난 반복성을 찾고 있다면 Motoman MH6-10 로봇보다 더 멀리 볼 필요가 없습니다. 이 강력한 로봇은 다재다능함에도 불구하고 최소한의 자본 투자가 필요하여 경제적이기도 합니다. 동급 최고 속도의 강력한 로봇을 찾고 있고 뛰어난 반복성을 찾고 있다면 Motoman MH6-10 로봇보다 더 멀리 볼 필요가 없습니다. 이 강력한 로봇은 다재다능함에도 불구하고 최소한의 자본 투자가 필요하여 경제적이기도 합니다. 다른 MH6 모델과 마찬가지로 MH6-10은 최소한의 설치 공간이 필요한
Motoman UP 20-6 XRC는 동적 가속을 지원하는 6축 고속 로봇입니다. 이러한 속도는 주기 시간을 줄이는 데 도움이 되어 궁극적으로 회사 비용을 절약합니다. 또한 작은 설치 공간으로 간소화되어 생산 라인의 공간을 절약할 수 있습니다! 이 콤팩트한 디자인은 공작물 고정 장치에 가까운 위치에 배치하여 부품 접근성을 향상시킵니다. Motoman UP20-6은 다양한 응용 분야에서 뛰어난 성능을 제공합니다. 자동화 세계에서 다재다능함의 왕이라고 할 수 있습니다! 이 로봇은 핸들링, 아크 용접, 조립, 포장, 팔레타이징, 그라인