

산업기술

산업 제조
Industrial Internet Consortium의 Track &Trace 테스트베드는 기계, 차량, 항공기 등과 같은 안전에 중요한 제품의 제조 및 유지보수를 위한 솔루션을 제공할 것입니다. 이러한 많은 분야에서 점점 더 발전된 산업용 전동 공구가 사용되고 있습니다. 산업 환경에서 지능형 전동 공구의 미래 사용 시나리오를 더 잘 이해하기 위해 저는 Airbus의 Sébastien Boria와 이야기했습니다. Sébastien은 미래의 에어버스 공장을 위한 R&D 메카트로닉스 기술 리더입니다.
SÉBASTIEN BORIA 현재 8,000대 이상의 Airbus 항공기가 운행 중이며 2015년 1월 31일 현재 15,276대의 항공기 주문이 기록되어 있습니다. 각 항공기는 완벽하게 조립해야 하는 수백만 개의 부품으로 구성된 복잡한 제품입니다. 혁신적인 생산 기술을 통합하는 것은 우리의 생산성에 매우 중요합니다. 오늘날 디지털 목업, 항공기 본체에 대한 레이저 투영 및 복잡한 3D 환경은 이미 당사 프로세스에 완전히 통합되었습니다. 우리 제조 라인의 각 세대는 10년 이상의 수명을 갖기 때문에 Future Factory는 1년을 훨씬 뛰어 넘는 전망을 채택해야 합니다. 여기에는 조립용 로봇 외골격, 고급 로봇(표준에서 코보틱스까지), ALM 기술, 작업 현장의 가상 고원 및 디지털화, 통합 생산 등을 포함하여 다양하고 중요한 고려 사항이 있습니다. 목표는 우리의 제조 프로세스를 개선하기 위해 조정되거나 성숙될 수 있는 새로운 실험실 기술을 활용하는 것입니다.
네, 저는 주로 스마트 생산과 첨단 로봇에 중점을 둡니다. 우리는 지능적이고 연결된 생산 도구를 사용하여 프로세스를 간소화하고 작업 현장에 오류 방지 프로세스를 제공하는 "스마트 작업장"을 구현하는 과정에 있습니다.
확신하는. 항공기를 조립하기 위해 완료해야 하는 수십만 개의 포인트 기반 프로세스 단계를 생각해 보십시오. 관련된 프로세스 단계의 양이 많기 때문에 작업 셀 수준에서 각 단계에 대한 개별 작업을 수행하는 것은 불가능합니다. 대신 이러한 프로세스 단계를 프로세스 시퀀스로 집합적으로 관리해야 합니다. 대부분의 조립 작업에는 드릴링 프로세스, 포인트 확인(즉, 측정) 프로세스 및 조임 프로세스가 포함됩니다. 이러한 프로세스는 하나의 택트 내에서 여러 단계를 포함하거나 여러 작업 셀 또는 조립 라인에 분산되거나 다양한 생산 작업자가 공유할 수도 있습니다. 예를 들어, 단일 3D 위치에서 동일한 조임 프로세스의 서로 다른 단계에서 서로 다른 토크 및 각도 매개변수가 사용됩니다. 따라서 이러한 프로세스 중 하나에 문제가 발생하면 부품이 작업 현장의 올바른 작업 셀에 있지 않기 때문에 비용이 많이 드는 전용 수정 작업으로 이어질 수 있습니다. 따라서 예를 들어 당면한 특정 작업에 대한 도구를 동적으로 구성하여 관련 휴대용 도구를 보다 지능적이고 연결되도록 함으로써 이러한 프로세스를 개선할 수 있는 엄청난 잠재력이 있습니다.
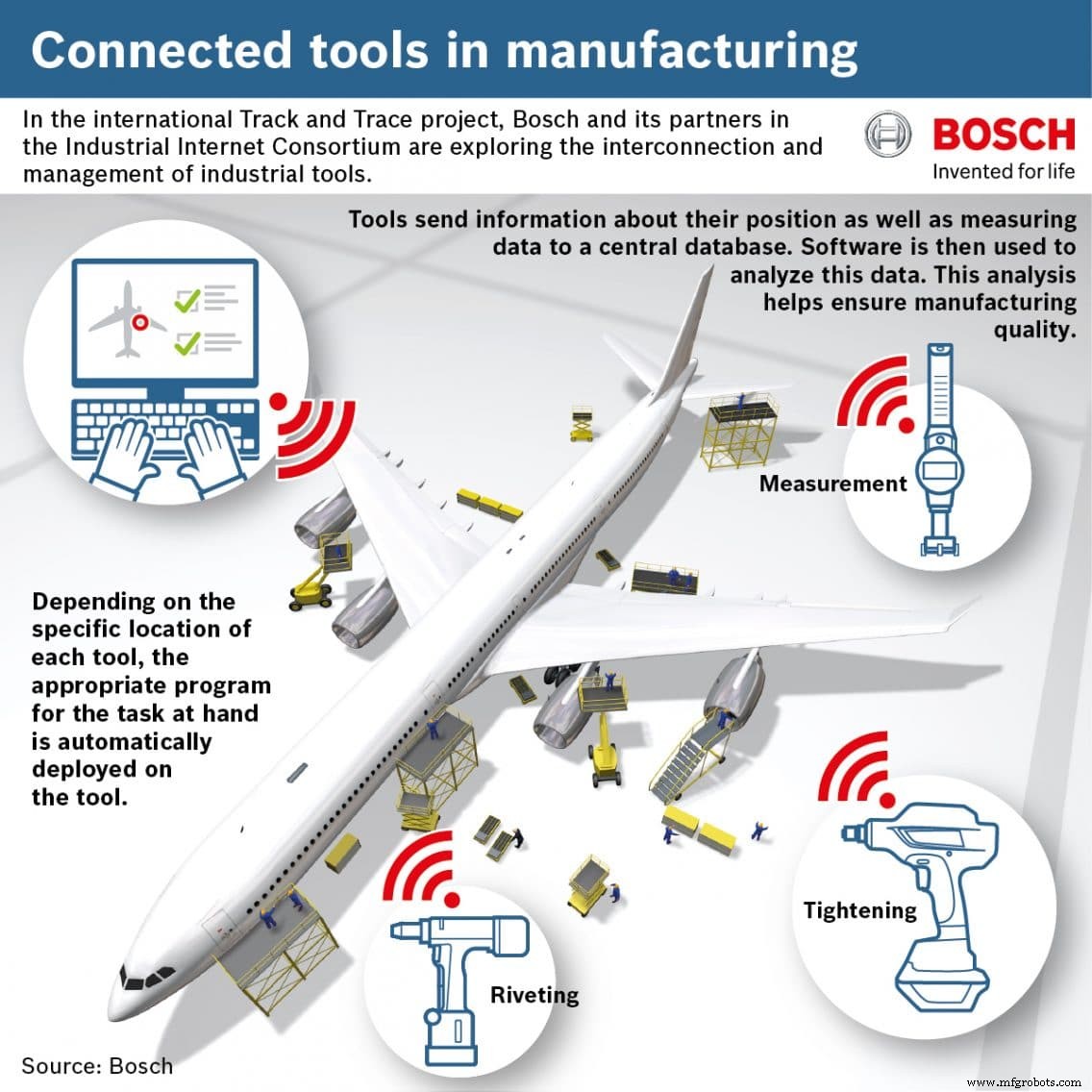 Industrial Internet Consortium의 Track &Trace 테스트베드 개요.
Industrial Internet Consortium의 Track &Trace 테스트베드 개요. 현재 우리는 지능이 내장된 표준 도구나 벨트 시스템과 같은 작업자 수트에 내장된 웨어러블 컴퓨터 지능을 통해 보다 스마트한 핸드헬드 드릴링, 조임 및 측정 프로세스에 집중하고 있습니다. 나중에 동일한 건축 설계를 사용하는 로봇 및 CNC 기계와의 통합도 살펴보겠습니다.
모든 것이 특수 하드웨어와 소프트웨어를 결합한 플랫폼에 연결됩니다. 다시 말해, 우리는 프로세스와 관련된 모든 시스템에 내장된 분산 인텔리전스와 연결된 아키텍처를 사용하고 있습니다. 우선, 도구 인텔리전스 자체가 있습니다. Future Factory 환경에서 사용되는 휴대용 전동 공구는 온보드 제어 장치가 있거나 최소한 웨어러블 컨트롤러를 지원할 수 있어야 합니다. 이는 물리적 도구 프로세스에 연결된 온보드 센서 및 액추에이터와 함께 프로세스 입력 데이터의 로컬 처리를 보장하는 데 중요합니다. 물론 대부분의 경우 무선 연결도 활용합니다.
과거에는 보다 전통적인 중앙 집중식 접근 방식을 취했지만 인프라 비용 절감이 필수적이므로 이기종 시스템을 실시간으로 관리하기에 충분히 효율적이지 않습니다. 이것이 우리가 이제 상호 연결된 도구의 매시업으로 작동하는 솔루션을 더 자세히 살펴보고 있는 이유입니다. 한 시스템에서 다른 시스템으로 데이터를 전송하거나 관련 동기화를 수행해야 하지만 로컬 인텔리전스가 요청하거나 전체 프로세스의 목적에 부합하는 경우에만 가능합니다. 즉, 모든 도구가 항상 중앙 백엔드에 연결되어 있는 것은 아닙니다. 그러나 도구는 정보와 지침을 교환하기 위해 서로 연결될 수 있습니다. 이렇게 하면 무선 네트워크를 사용할 수 없는 항공기 내부에서 작업하는 경우와 같이 많은 문제가 해결됩니다.
실내 위치 파악이 중요하고 MES 및 PLM 시스템의 데이터와의 통합도 중요합니다. 도구 및 작업 항목에 대한 현지화 데이터를 PLM 데이터와 자동으로 조정하는 것도 중요합니다. 조정은 다양한 참값(ISO 15725 참조)과 응용 프로그램에 따라 요청됩니다. 작업 현장이나 작업 셀 내에서 도구를 추적하는 것은 개별 부품에 대한 프로세스를 수행할 때 한 위치에서 다른 위치로 휴대용 도구 팁을 추적하는 것과 동일한 작업이 아닙니다. 첫 번째 경우 추적 데이터의 부정확성은 수십 센티미터 또는 심지어 미터에 해당할 수 있는 반면, 두 번째 경우의 부정확성은 수십 밀리미터의 문제일 수 있습니다. 다시 말하지만, 시스템 통합은 오류와 품질이 떨어지는 결과를 피하기 위해 컨텍스트 기반 적응 동작을 고려해야 합니다.
정확히는 아닙니다. 우리는 경험을 통해 엔지니어링에서 직접 가져온 CAD/CAM 데이터 모델이 때때로 우리의 목적에 비해 너무 상세하고 세분화될 수 있다는 것을 배웠습니다. 그래서 우리는 현재 지리 데이터에 대한 단순화된 XML 데이터 세트와 함께 작동하는 중간 계층을 개발하고 있습니다. 이 계층은 전동 공구를 3D PLM 계층과 통합하는 데 도움이 됩니다. 또한 현장 작업자가 전체 3D 모델링 환경을 사용하여 작업 환경을 구성할 것이라고 기대할 수 없습니다. 즉, 더 간단한 구성 애플리케이션을 빌드해야 합니다.
이 텍스트는 Dirk Slama, Frank Puhlmann, Jim Morrish 및 Rishi M Bhatnagar의 Enterprise IoT 책에서 발췌했습니다(O'Reilly, 2015). 산업용 전동 공구 공급업체의 관점에 대한 통찰력을 얻으려면 Rexroth에서 Enterprise IoT의 Martin Doelfs와의 인터뷰를 읽어보십시오.
도서:엔터프라이즈 IoT공개 인터페이스 및 인터페이스 기반 통합에 대한 분명한 초점과 마찬가지로 보급이 중요합니다. API를 통한 소프트웨어 개방성은 효율적인 통합을 가능하게 하는 주요 요소입니다. 따라서 우리는 강력한 표준을 기반으로 중립 인터페이스를 정의하여 자체 엔지니어와 공급업체 및 파트너가 전체 작업 현장 지원 시스템에 맞는 도구와 응용 프로그램을 개발할 수 있도록 합니다. 높은 수준의 이질성 때문에 이러한 유형의 통합 접근 방식은 미래 생산 시스템의 핵심입니다.
산업기술
산업 공정은 HRC(Human-Robot Collaboration)에 의해 혁신되고 있습니다. 협동로봇은 2014년에 시장에 출시되었으며 처음부터 협동로봇은 널리 성공했으며 다양한 산업, 특히 자동차 및 전자 제품에서 핵심 플레이어가 되었습니다. 이러한 산업 등은 미래의 공장이 어떤 모습일지 엿볼 수 있습니다. 인간과 로봇이 분리되지 않고 안전 펜스 없이 생산 라인에서 협력합니다. 미래의 공장은 육체와 기계로 구성된 이 팀이 계속 성장하는 것을 계속 보게 될 것입니다. 인간-로봇 협업을 통해 인간과 기계 모두 생산 라인에서 특정
파이프가 자동으로 스스로 고칠 수 있다면 어떨까요? 금이 가거나 부러지거나 옷이 날씨나 사용자가 하는 활동에 따라 변경될 수 있는 경우 ? 스스로 조립하는 가구, 성장에 적응하는 보철물... 이것들은 4D 프린팅 기술이 실현할 것으로 예상되는 응용 분야 중 일부에 불과합니다. 이미지 1:모양을 수정하는 4D 프린팅 발톱. 출처:Sculpteo. 3D 프린팅 거의 30년 동안 존재해 왔으며 여전히 연구 과정에 있는 동안 새로운 재료 및 응용 프로그램, 4D와 같은 새로운 기술이 등장했습니다. MIT 자가 조립 연구소에서 ,