거친 표면에 대한 수직 하중이 있는 접촉 영역의 진화는 지진 역학에서 기계 마모에 이르기까지 근본적이고 실제적으로 매우 중요합니다. 이 작업은 정상적인 접촉 거동에 대한 원자 규모와 거시적 규모 사이의 간격을 연결합니다. 개별 접촉(클러스터)의 큰 앙상블에 의해 형성되는 실제 접촉 영역은 겉보기 표면적보다 훨씬 작은 것으로 입증되었습니다. 개별 접촉 클러스터의 분포와 이들 간의 상호 작용은 접촉하는 고체의 메커니즘을 밝히는 데 중요합니다. 이를 위해 Green의 기능 분자 역학(GFMD)은 접촉 클러스터가 원자 규모에서 거시적 규모로 진화하는 방식과 클러스터 간의 상호 작용을 모두 연구하는 데 사용됩니다. 클러스터 간의 상호 작용이 클러스터 형성에 강한 영향을 미치는 것으로 나타났습니다. 접촉 클러스터의 형성 및 분포는 돌기 모델에서 예측한 것보다 훨씬 더 복잡합니다. 그들 사이의 상호 작용에 대한 무지는 접촉력을 과대 평가하게 만듭니다. 실제 접촉에서 접촉 클러스터는 돌기 사이의 상호 작용으로 인해 더 작고 더 분리됩니다. 마찰에 대한 다음 연구에서는 수직 하중과의 접촉 면적의 정확한 특성을 이해하는 것이 필수적입니다.
<섹션 데이터-제목="배경">
배경
대부분의 거시적 표면은 거칠고 프랙탈로 간주됩니다[1, 2]. 거친 표면 사이의 접촉 거동은 완벽하게 매끄러운 표면의 접촉 거동보다 훨씬 더 복잡합니다[3, 4]. 실제 접촉 영역은 겉보기 표면적보다 훨씬 작은 개별 접촉 영역(클러스터)의 큰 앙상블에 의해 형성됩니다. 수직력과 접촉 클러스터의 크기, 모양 및 분포는 접촉 거동을 밝히는 데 중요하며 이는 마찰에 대한 다음 연구[5,6,7]에 필수적입니다.
접촉면적과 하중의 관계를 구하기 위해 1960년대 이후로 다양한 모델이 제안되었다[1, 8, 9, 10, 11, 12, 13, 14]. 그 중 요철 모델이 가장 간단하고 인기 있는 모델입니다. 돌기 모델의 초기 적용 중 하나에서 Greenwood와 Williamson[8]은 돌기가 반지름은 같지만 높이가 다르다고 가정하여 접촉 계면의 거칠기를 설명합니다. 그 이후로 asperity 모델이 우세했고 이 분야에서 방대한 양의 문헌이 나타났습니다. Whitehouse and Archard [15]는 돌기 팁의 무작위 곡률 반경을 고려하여 Greenwood와 Williamson(G-W) 모델을 개발했습니다. Nayak[16,17,18]은 무작위 프로세스 이론[19, 20]의 기술을 가우스 거칠기 분석에 도입했으며 이후 Bush et al. [9] 거친 표면 접촉.
돌기 모델의 기본 가정 중 하나는 돌기 간의 상호 작용을 무시할 수 있다는 것인데, 이는 잠재적 접촉 돌기가 표면 형상에 의해 미리 결정될 수 있음을 나타냅니다. 그러나 이러한 가정은 접촉력과 접촉 면적의 부정확한 추정으로 이어질 수 있습니다. 접촉 클러스터의 진화와 클러스터 간의 상호 작용을 얻기 위해 Green의 GFMD(함수 분자 역학)[21,22,23]를 사용하여 프랙탈 거친 표면을 연구합니다.
이 작업은 정상적인 접촉 거동을 위해 원자 규모와 거시적 규모 사이의 간격을 연결하는 것입니다. 원자에서 거시적 규모로의 접촉 영역의 진화는 돌기 상호 작용을 고려한 수치적 예를 통해 설명됩니다. 후속 논의에서 우리는 먼저 프랙탈 표면 생성, GFMD 모델, 접촉 클러스터 감지 알고리즘 및 수치 실험 설계에 대한 접근 방식을 간략하게 제시합니다. 그런 다음 접촉 클러스터의 형성 및 개발과 이러한 프로세스가 인터페이스 동작에 미치는 영향에 중점을 둡니다.
방법
거친 프랙탈 표면 생성
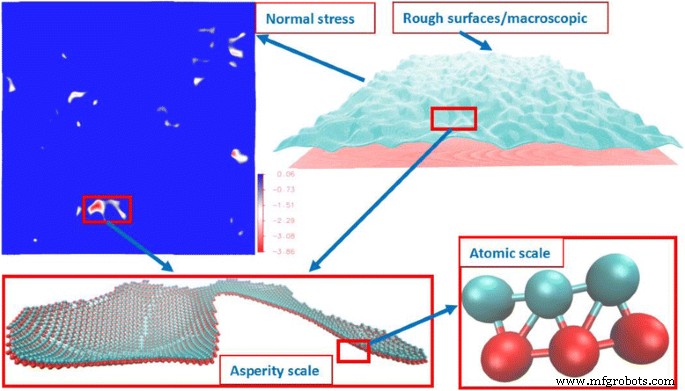
거친 표면의 접촉 거동을 연구하려면 수치 모델에 대한 표면을 생성해야 합니다. 프랙탈 표면에 대해 여러 알고리즘이 사용되었습니다[24]. 이 작업에서는 푸리에 변환 방법을 사용하여 그림 1과 같이 프랙탈 거친 표면을 생성합니다. 프랙탈 거친 표면 기하학을 결정하려면 4개의 매개변수가 필요합니다. 이것은 최대 주파수(w하 ), 최소 주파수(w엘 ), 허스트 지수(H ) 및 진폭의 표준 편차(P ). RMS(제곱 평균 제곱근) 높이 \( \left(\sqrt{M_0}\right) \), RMS 기울기 \( \left(\sqrt{M_2}\right) \) , 및 RMS 곡률 \( \left(\sqrt{M_4}\right) \)은 인터페이스 동작에 대한 주요 매개변수입니다. 여기서 M나나는 표면 스펙트럼의 방사상 모멘트 [19, 20]. 표면 통계 매개변수 M나 프로필 통계 매개변수 m과 관련이 있습니다. 나 다음 방정식에 의해:\( {M}_0={m}_0,{M}_2=2{m}_2,{M}_4=\frac{4}{3}{m}_4 \). 돌기 밀도 n (표면 정상 또는 계곡)은 다음 방정식으로 결정할 수 있습니다.
여기서 B 는 P와 관련된 표면 거칠기 상수입니다. . 방정식 (3) 및 (2)는 프랙탈 표면 정상/계곡 수가 파장 및 허스트 지수에 의존함을 나타냅니다. 프랙탈 표면 통계적 속성에 대한 자세한 논의는 문헌[25, 26]에서 찾을 수 있습니다.
푸리에 변환 알고리즘에서 일반적인 예로 Hurst 구성 요소를 H로 설정합니다. =0.5, 최대 주파수 w엘 =1/(24σ ), 최소 주파수 w하 =1/(256σ ), 주파수 진폭의 표준편차는 P가 됩니다. =0.69, 시스템 크기는 512 × 512 원자(초기 간격은 1.12σ임) ). 이러한 입력 매개변수는 다음 통계 매개변수로 표면을 생성합니다. 표면 RMS 기울기 \( \sqrt{M_2}=0.077 \) 및 RMS 곡률 \( \sqrt{M_4}=0.0077 \) . 표면 정상/계곡의 총 수는 식을 기준으로 150입니다. (2) 숫자를 세어보면 지표면 정상의 개수는 158개, 계곡의 개수는 159개이다. 오차는 5% 이내로 시스템 규모가 통계적으로 수용 가능한 수준임을 시사한다. 사실, 시스템 크기를 최대 2048 × 2048 원자로 늘리면(초기 간격은 1.12σ와 같습니다) ), 통계 매개변수에 대한 결과는 소규모 시스템의 결과와 일치합니다.
GFMD 모델
입자간 상호작용은 실험적으로 포착하기가 매우 어렵습니다[6, 27]. 최근에 분자 역학은 접촉/마찰 메커니즘의 분자 기원을 조사하는 것을 목표로 입자 간 상호 작용을 시뮬레이션하는 데 사용되었습니다. 그러나 대규모 분자 역학 시뮬레이션의 경우 계산 비용이 상당히 높습니다. 따라서 GFMD는 고효율로 인해 표면을 시뮬레이션하기 위해 도입되었습니다. GFMD는 분자 역학을 사용하여 계면 원자(여기서는 2개 층)의 상호 작용을 시뮬레이션하는 반면, 일반적으로 탄성 거동을 나타내는 비계면층은 Green 함수로 시뮬레이션됩니다. 따라서 큰 원자 시스템을 인터페이스에서 2층 원자로 축소하여(그림 1 참조) 계산 비용을 크게 줄입니다. GFMD에 대한 자세한 논의는 문헌[21,22,23,28]에서 볼 수 있습니다. GFMD 모델에서 Lennard-Jones(LJ) 전위는 입자 간 상호 작용을 시뮬레이션하는 데 사용됩니다. 방정식은 다음과 같이 작성됩니다.
여기서 ε 포텐셜 우물의 깊이, σ 는 입자 간 전위가 0인 유한 거리이고 r 입자 사이의 거리입니다. 우리는 ε를 취합니다. , σ , 및 ε /σ 에너지, 거리 단위 및 힘 단위로 각각. LJ 포텐셜에 따르면 r =2
1/6σ ≈ 1.12σ , 입자간 힘은 0입니다. r일 때> 1.12σ , 입자간 힘이 매력적입니다. r일 때 <1.12σ , 입자간 힘은 반발력입니다. 이 작업에서는 접착력을 고려하지 않기 때문에 컷오프 거리는 1.12σ로 설정합니다. . 원자층에 사용되는 결정 구조는 면심 입방체(FCC)입니다. 대칭으로 인해 그림 1과 같이 인터페이스의 레이어만 표면 기하학을 형성하고 평평한 표면 아래의 탄성 블록은 Green의 함수로 시뮬레이션됩니다.
접점 클러스터 인식 방식
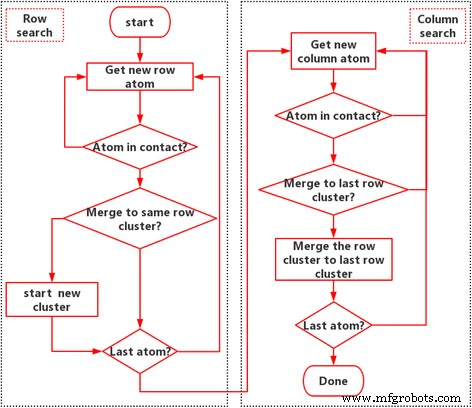
그림 1과 같이 인터페이스에서 관찰된 3개의 스케일이 있습니다. (1) LJ 전위에 의해 시뮬레이션된 원자 스케일; (2) 접촉 원자의 그룹 효과인 돌기 척도; 및 (3) 접촉 클러스터의 그룹 효과인 거시적 규모. 접촉 클러스터의 크기, 모양, 위치 및 분포는 분자 거동과 인터페이스 속성 사이의 중요한 다리입니다. 나노스케일에서 원자 접촉 영역은 정의하기 어렵다[6]. 여기서 우리는 수직 성분 힘 fz> 0에 의해 접촉 원자를 정의합니다. 이어서, 연결된 접촉 원자를 접촉 클러스터로 정의합니다. 레이블링 기술[29, 30]은 접촉 클러스터를 검색하는 데 사용됩니다. 여기서는 재귀 검색 프로세스를 피하는 수정된 가속 알고리즘을 사용합니다. 알고리즘 흐름도는 그림 2에 나와 있으며, 여기서 원자력 데이터는 Green의 함수 분자 역학 시뮬레이션에서 추출됩니다. 알고리즘은 다음과 같이 8가지 주요 단계로 나뉩니다.
<그림>
접촉 클러스터 감지 알고리즘:라벨링 기술
1단계. 행 검색을 시작하고 새로운 원자 데이터를 가져옵니다. 즉, 행에서 행으로 원자를 검색합니다.
2단계. 원자가 접촉하고 있는지 확인합니다. 접촉이 되지 않았다면 1단계로 돌아가고, 접촉하고 있다면 다음 단계로 넘어간다.
3단계. 현재 원자와 같은 행의 이전 원자를 비교합니다. 이전 원자도 접촉하고 있는 경우 이전 원자가 속한 클러스터에 원자를 병합하고 이전 원자와 동일한 번호로 원자에 레이블을 지정합니다. 이전 원자가 접촉하지 않은 경우 이전 숫자에 1을 더한 새 숫자로 원자에 레이블을 지정합니다.
4단계. 마지막 원자인지 확인합니다. 그렇지 않은 경우 1단계로 돌아가거나 열 검색 프로세스로 이동합니다.
5단계. 열 검색을 시작하고 새로운 원자 데이터를 가져옵니다. 즉, 열에서 열로 원자를 검색합니다.
6단계. 원자가 접촉하고 있는지 확인합니다. 접촉이 되지 않았다면 5단계로 돌아가고, 접촉하고 있다면 다음 단계로 넘어간다.
7단계. 현재 원자를 같은 열에 있는 이전 원자와 비교합니다. 이전 원자도 접촉하고 있고 다른 클러스터에 속해 있으면 현재 클러스터를 이전 원자가 속한 클러스터에 병합하고 동일한 번호로 원자에 레이블을 지정하고 저장합니다. 이전 원자가 접촉하지 않았거나 같은 클러스터에 속해 있으면 다음 단계로 이동합니다.
8단계. 현재 원자가 마지막 원자인지 확인합니다. 그렇지 않은 경우 5단계로 돌아가지 않으면 검색 프로세스가 완료됩니다.
수치 실험 설계
두 개의 거친 표면 접촉 문제는 등가 탄성 계수 E*를 도입하여 하나의 복합 강성 거친 표면과 평평한 탄성 표면의 문제로 단순화될 수 있다는 것이 잘 알려져 있습니다. ,
여기서 E1 및 E2 는 각각 윗면과 아랫면의 탄성계수입니다. 단순함을 위해 우리는 탄력 있는 매끄러운 표면과 접촉하는 단단한 거친 표면을 고려하고 접촉 클러스터의 형성 및 발달과 힘-영역 거동을 연구합니다. 다음 논의에서 우리는 위에서 생성된 표면을 사용할 것입니다(상단 표면은 단단하고 거칠다(E1 =∞), 하부 표면은 부드럽고 탄력적입니다(E2 =3ε /σ
3
)) 접촉 행동을 연구하기 위해, 여기서 v1 및 v2 0.5로 설정됩니다. 우리의 시스템 크기는 512 × 512 원자입니다(초기 간격은 1.12σ) ), 주기적인 경계 조건은 x에서 사용됩니다. -이 비행기. 탄성 블록 깊이는 1024개의 원자층으로 설정됩니다(초기 간격은 1.12σ). ). 일반 분자 역학 시뮬레이션에서 시스템은 268,697,600개의 원자로 구성됩니다. GFMD 모델은 그림 1과 같이 숫자를 524,288(원자의 두 층)로 줄입니다. 우리는 거친 표면(상단)을 평평한 탄성 표면으로 점진적으로 밀어 넣습니다. 단단한 표면의 하중은 변위에 의해 제어됩니다. 각 변위 하중 단계는 0.01σ로 설정됩니다. , 그리고 GFMD 알고리즘은 원자력이 수렴 기준 L을 충족할 때까지 각 원자의 위치를 업데이트합니다.
1
-norm =0.01ε/σ. 무한 루프를 피하기 위해 최대 반복 횟수는 50,000으로 설정됩니다.
결과 및 토론
클러스터 배포 및 개발 문의
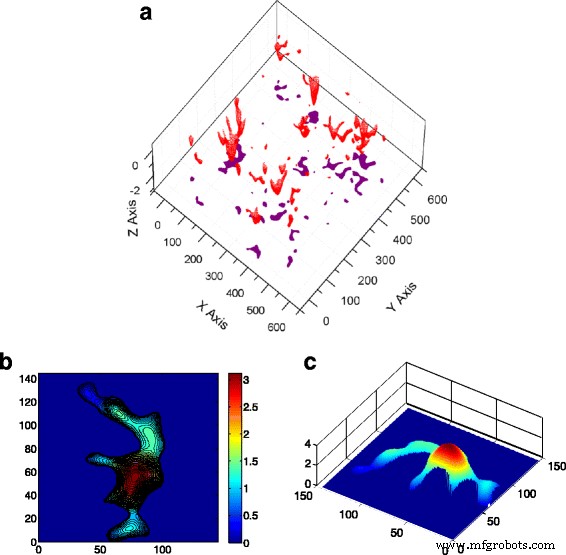
돌기 모델은 돌기를 구형 또는 타원형으로 간주하고 접촉하는 돌기 간의 상호 작용을 고려하지 않습니다. 본 연구에서는 위에서 생성된 표면에서 요철 모델에 사용된 요철을 추출하였다. 돌기 모델에서 잠재적인 접촉 돌기는 높이를 기반으로 표면 형상에 의해 미리 결정할 수 있습니다. 즉, 표면 정상/계곡은 높이에 따라 접촉 클러스터로 형성됩니다. 그러나 실제로는 요철이 불규칙한 모양을 하고 있으며, 일반적으로 그림 2와 같이 인접한 여러 요철이 합쳐져 큰 요철이 되는 경우가 있다. 초기에는 6개의 독립적인 요철이 존재하며, 접촉력으로 증가하면 마침내 큰 접촉 클러스터로 병합됩니다(그림 3). 이는 돌기 사이의 거리가 돌기가 서로 영향을 미치지 않을 만큼 충분히 멀다는 가정이 부정확한 결과를 초래할 수 있음을 시사합니다.
<사진>
클러스터의 모양과 병합 효과. 아 연락처 클러스터의 3D 보기 및 x에 투영 -이 평면(σ에서 ). ㄴ 6개의 독립적인 돌기로 구성된 전형적인 접촉 클러스터. ㄷ 접촉 클러스터 기하학의 3D 보기(σ )
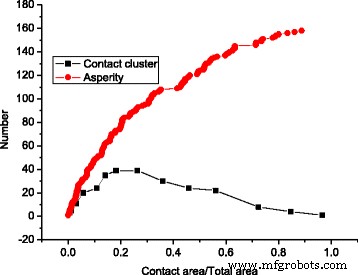
그림 4는 클러스터 수가 먼저 증가하고 접촉 면적이 증가함에 따라 감소하는 반면 표면 돌기는 접촉 면적이 증가함에 따라 항상 증가함을 보여줍니다. 이는 그림 3에서 설명한 병합 효과 때문입니다.
<그림>
서로 다른 접촉 영역 아래의 표면 계곡 및 클러스터 수
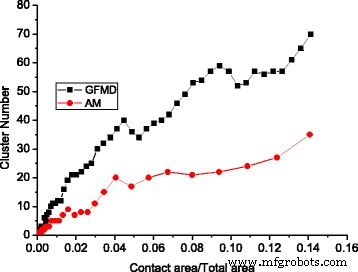
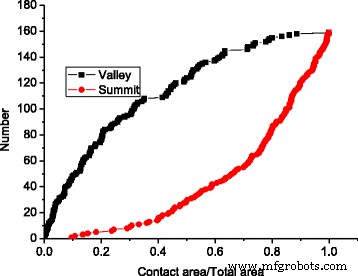
접촉 클러스터 병합 효과는 돌기 모델과 GFMD 모델 모두에서 관찰되었습니다. 그러나 동일한 접촉 면적에서 GFMD 모델의 접촉 클러스터 수는 그림 5에서 볼 수 있듯이 돌기 모델의 접촉 클러스터 수보다 훨씬 큽니다. GFMD 모델의 접촉 클러스터 수는 거의 두 배인 것으로 관찰됩니다. 그 주된 이유는 asperity 모델이 inter-asperity 상호 작용을 고려하지 않기 때문입니다. 그러나 GFMD 모델에서 접촉 클러스터는 서로 영향을 미칩니다. 접촉 클러스터에 의해 생성된 변위 필드는 표면 전체에 걸쳐 연속적입니다. 클러스터의 큰 앙상블의 변위는 새로운 접촉 클러스터의 형성에 영향을 미치는 탄성 표면에 새로운 기하학을 생성합니다. 따라서 접촉 클러스터의 형성은 단단한 거친 표면의 높이뿐만 아니라 부드러운 탄성 표면의 변형에 의해 영향을 받을 수 있습니다. 이는 각각 asperity 모델과 GFMD 모델에 대해 서로 다른 영역에서 접촉 클러스터 분포를 보여주는 그림 6에서도 확인할 수 있습니다. 그림 6과 같이 접촉 면적 5%에서 접촉 클러스터 번호는 asperity 모델과 GFMD 모델에서 각각 17과 34이고, 10%의 접촉 면적에서 접촉 클러스터 번호는 24와 52가 됩니다. , 각각. 이것은 GFMD 모델의 접촉 클러스터가 돌기 모델의 접촉 클러스터보다 더 이산적임을 시사합니다. GFMD 모델에서 평균 클러스터 크기는 더 작지만 그림 7에서 볼 수 있듯이 대부분의 클러스터는 정상/계곡과 일치합니다. 또한 돌기 모델은 계곡 또는 정상을 잠재적 돌기로 간주합니다( 어느 쪽이 접촉하는지에 따라). 그러나 Fig. 8에서는 접촉면적이 증가할수록 정상과 계곡이 모두 접촉할 수 있음을 알 수 있었다. 그림 8에서 대부분의 접촉 요철은 접촉 면적이 작을 때 표면 골입니다. 그러나 접촉 면적이 표면적의 10%보다 크면 접촉 클러스터로 점점 더 많은 정상 회담이 형성될 수도 있습니다.
<그림>
다양한 모델을 위한 클러스터 개발
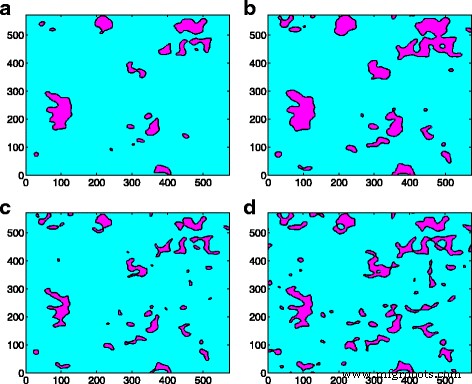
<그림>
클러스터 분포 등고선(σ) ) 돌기 모델 및 GFMD 모델에 대해 각각 다른 접촉 영역에서. 아 접촉 면적이 5%인 돌기 모델. ㄴ 접촉 면적이 10%인 돌기 모델. ㄷ 5% 접촉 면적의 GFMD 모델. d 10% 접촉 면적의 GFMD 모델
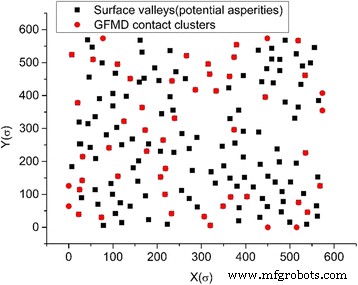
<그림>
10% 접촉 면적에서 접촉 클러스터 및 표면 계곡의 위치
<그림>
표면 계곡과 정상의 숫자는 다른 지역에서 증가합니다.
접촉 면적 부하 관계
수직 하중 하에서의 힘-면적 관계는 접촉 거동에 필수적입니다. 이전 모델에서 돌기는 일반적으로 구형 및 타원형으로 간주됩니다. 그러나 실제 접촉 클러스터는 훨씬 더 복잡합니다. 이 섹션에서는 세 가지 모델의 접촉력-면적 관계를 비교했습니다. (1) GFMD 모델; (2) 돌기 모델(AM으로 표시), GFMD를 사용하여 돌기를 평평한 탄성 표면으로 밀어넣기 전에 표면에서 직접 돌기를 추출합니다(이는 접촉 중에 예상치 못한 접촉 클러스터 형성이 없음을 보장함); 및 (3) 돌기가 등가 구로 변환되는 Greenwood 및 Williamson 모델(G-W로 표시). 구 반경은 다음과 같이 구합니다.
GFMD 모델과 표면에서 정확히 요철이 추출된 요철 모델의 경우 GFMD에서 추출한 각 접촉 클러스터의 힘을 합산하여 인터페이스의 총 힘을 얻을 수 있습니다. Greenwood 및 Williamson 모델의 경우 각 돌기 힘에 대해 Hertz 이론을 사용합니다(GFMD 모델에서 사용된 것과 동일한 재료 속성 사용). 즉, 총 힘 F 다음과 같이 표현할 수 있습니다.
여기서 Z나 돌기 높이, d 는 단단한 표면에 적용된 변위이며 f 는 Hertz 접촉 이론에 기초한 돌기 접촉력입니다.
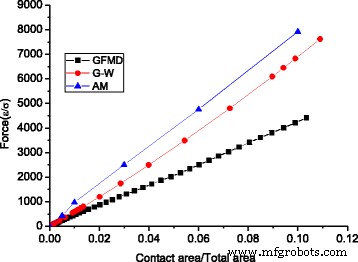
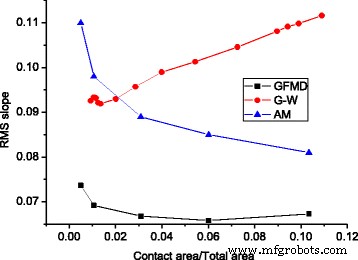
그림 9에서는 선형 관계를 나타내는 세 가지 모델의 힘-면적 관계를 비교했습니다. GFMD의 전체 힘은 요철 모델 및 G-W 모델보다 훨씬 작은 것으로 관찰됩니다. F asperity 모델에서 GFMD에서 예측한 것보다 1.80배, F G-W 모델에서 GFMD에 의해 예측된 것보다 1.54배입니다. 이것은 접촉 클러스터의 RMS 기울기로 설명할 수 있습니다. 정상 하중은 RMS 기울기, 즉 \( L\propto \sqrt{M_2} \)에 비례하는 것으로 알려져 있습니다. GFMD 모델에서 접촉 영역은 돌기 모델보다 침투가 얕은 더 많은 수의 클러스터로 구성됩니다. 돌기 팁의 기울기가 더 작기 때문에 GFMD 모델에서 접촉 클러스터에 대한 RMS 기울기도 더 작습니다. 그림 10은 세 가지 모델에 대한 접점 클러스터의 RMS 기울기를 보여줍니다. GFMD에서 접촉 클러스터의 RMS 기울기는 0.077의 표면 RMS 기울기보다 작은 반면 다른 두 모델의 접촉 클러스터 RMS 기울기는 표면 RMS 기울기보다 큰 것을 알 수 있습니다.
<그림>
다른 모델에 대한 접촉 면적과 하중의 관계
<사진>
표면 RMS 기울기가 0.077인 다른 모델에 대해 서로 다른 접촉 면적을 갖는 접촉 클러스터의 RMS 기울기
결론
원자 규모에서 거시적 규모로의 접촉 면적의 진화를 찾기 위해 GFMD 모델을 사용하여 거친 프랙탈 표면 접촉 문제가 연구되었습니다. 우리는 0보다 큰 힘의 존재로 원자 접촉을 정의하고 동일한 시스템에서 세 가지 다른 길이 척도를 연구했습니다. 요철간 상호작용은 접촉 클러스터의 형성에 필수적인 것으로 밝혀졌습니다. 일부 클러스터는 큰 클러스터로 병합할 수 있을 만큼 충분히 가깝습니다. 실제 접촉 영역은 탄성이 있는 매끄러운 표면의 탄성 변형으로 인해 표면 기하학에 의해 예측된 것보다 훨씬 더 복잡합니다. 대부분의 접촉 클러스터 위치는 표면 정상/계곡과 일치합니다. 그러나 클러스터의 크기가 더 작고 그 형성은 표면 요철 높이에 의해 결정되지 않습니다. 접촉 면적이 증가함에 따라 정상과 계곡 모두 접촉 클러스터로 형성될 수 있습니다. GFMD 모델에서 힘은 돌기 모델보다 훨씬 작은 반면, GFMD 모델에서 접촉 클러스터 수는 훨씬 더 큽니다. GFMD 모델에서 접촉 클러스터의 RMS 기울기는 돌기 모델보다 작기 때문에 돌기 모델이 더 높은 압력으로 이어지는 이유를 설명합니다. 우리의 발견은 실제 접촉 면적이 단순히 표면 기하학에 의해 예측될 수 없음을 시사합니다. 마찰에 대한 다음 연구에서는 수직하중과의 실제 접촉면적이 중요합니다.