산업 제조
제조공정

이 튜토리얼에서 우리는 Arduino 기반 SCARA 로봇을 구축하는 방법을 배울 것입니다. 로봇 설계부터 로봇을 제어하기 위한 자체 그래픽 사용자 인터페이스 개발까지 전체 과정을 보여드리겠습니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 로봇은 4개의 자유도를 가지며 4개의 NEMA 17 스테퍼 모터로 구동됩니다. 또한 이 경우 엔드 이펙터 또는 로봇 그리퍼를 제어하기 위한 소형 서보 모터가 있습니다. 이 SCARA 로봇의 두뇌는 모터 제어를 위한 CNC 실드 및 4개의 A4988 스테퍼 드라이

당신이 호흡하는 공기의 질에 대해 궁금한 적이 있습니까, 아니면 밤새도록 잠을 자고도 아침에 피곤하거나 사무실에서 때때로 졸리다고 느끼는 이유가 무엇입니까? 나쁜 공기 질이 건강에 좋지 않은 영향을 줄 뿐만 아니라 피로, 두통, 집중력 상실, 심박수 증가 등을 유발할 수 있습니다. 공기의 질을 모니터링하는 것은 실제로 당신이 생각하는 것보다 더 중요할 수 있습니다. 따라서 이 튜토리얼에서는 PM2.5, CO2, VOC, 오존은 물론 온도와 습도를 측정할 수 있는 자체 대기질 모니터를 구축하는 방법을 배웁니다. 다음 비디오를 보거나

이 튜토리얼에서는 Mars Perseverance Rover의 복제본을 만드는 방법을 보여 드리겠습니다. 물론 현재 화성을 탐사하고 있는 실제 로버에서 영감을 받아 이 기술을 사랑하는 학생, 메이커, 메카트로닉스, 로봇 매니아 등 누구나 쉽게 이 영상의 지시를 따를 수 있고, 자신의 화성 탐사선을 구축합니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 이 로버의 주요 기능을 살펴보겠습니다. 로커 보기 서스펜션을 사용하여 로버가 고르지 않은 지형에서 원활하게 달릴 수 있고 6개의 바퀴가 항상 지면과

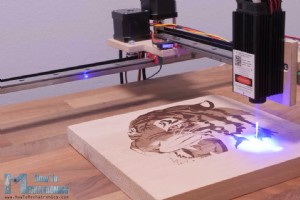
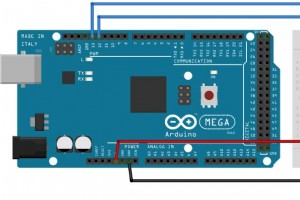
이 튜토리얼에서는 이전 비디오 중 하나에서 제작한 DIY 3D Printed SCARA 로봇 팔을 레이저 조각기로 변환하는 방법을 보여 드리겠습니다. 동영상 다음 동영상을 보거나 아래 기사를 읽을 수 있습니다. 프로젝트 개요 SCARA 로봇은 4개의 NEMA 17 스테퍼 모터로 구동되고 Arduino 보드를 사용하여 제어되는 4개의 자유도를 가지고 있습니다. 원본 비디오에서는 Arduino UNO 보드를 CNC Shield와 조합하여 사용했지만 이제는 Arduino MEGA 보드와 RAMP 보드를 함께 사용합니다. 로봇을 제어하
이 튜토리얼에서는 3D 프린터를 사용하지 않고 가능한 한 최소한의 부품으로 가장 간단한 CNC 기계를 만드는 방법을 보여 드리겠습니다. 좋아요. 저는 대부분의 최근 프로젝트에 3D 프린터를 사용하고 있습니다. 물론 3D 프린터로 원하는 모양을 쉽게 만들 수 있기 때문에 프로토타이핑에 적합하기 때문입니다. 하지만 모든 사람이 3D 프린터를 가지고 있는 것은 아니므로 3D 프린터나 다른 CNC 기계의 도움 없이도 물건을 만들 수 있다는 것을 보여드리고 싶었습니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다.
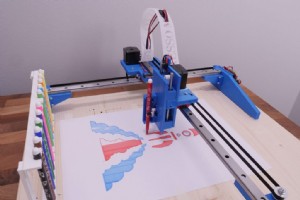
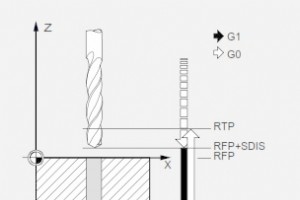
이 튜토리얼에서는 내가 CNC 펜 플로터 또는 드로잉 머신을 구축한 방법을 보여주지만 하나의 멋진 기능은 자동 도구 변경입니다. 다시 말해, 기계가 자동으로 색상을 변경할 수 있으므로 우리는 이 기계로 정말 멋진 것을 그릴 수 있습니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 기계 구성은 가능한 최소 부품으로 가장 간단한 CNC 기계를 만드는 것이 목표였던 이전 비디오의 DIY CNC 레이저 조각기를 기반으로 합니다. X, Y 및 Z 축 모션을 위해 3개의 NEMA 17 스테퍼 모터를 사용하고

Arduino 튜토리얼 시리즈의 첫 번째 Arduino 튜토리얼에 오신 것을 환영합니다. 이 자습서에서는 시작하기 자습서로 시작하고 다음 자습서에서는 고급 자습서까지 계속 진행합니다. 이것은 따라하기 쉬운 단계별 비디오 자습서입니다. 또한 동영상 아래에서 이 튜토리얼에 필요한 부분과 동영상의 예제 소스 코드를 찾을 수 있습니다. 이 Arduino 튜토리얼에 필요한 구성요소 아두이노 보드 ..... LED ........................................... 소스 코드 int led =13;
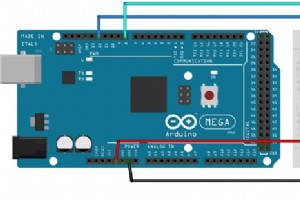
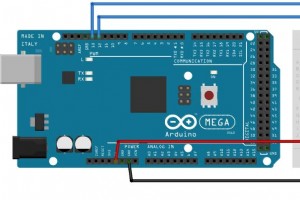
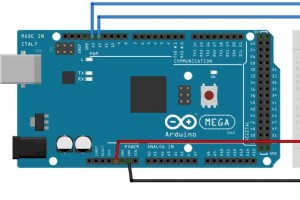
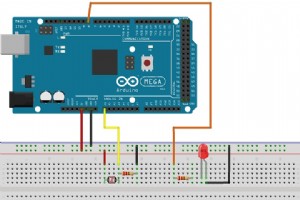
Arduino 자습서 시리즈의 두 번째 Arduino 자습서에 오신 것을 환영합니다. 이 튜토리얼에서는 디지털 입력 및 출력 핀이 작동하는 방식을 배우고 버튼과 LED를 사용하여 몇 가지 예를 만들 것입니다. 또한 PWM(Pulse Width Modulation)이 무엇인지 배우고 PWM을 사용하여 LED 밝기를 제어하는 예를 만듭니다. 이것은 따라하기 쉬운 단계별 비디오 자습서입니다. 또한 동영상 아래에서 이 튜토리얼에 필요한 부품과 동영상의 예제 소스 코드를 찾을 수 있습니다. 이 가이드에 필요한 구성요소 Ardui
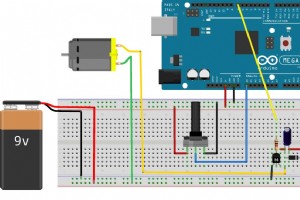
Arduino 자습서 시리즈의 네 번째 Arduino 자습서에 오신 것을 환영합니다. 이 튜토리얼에서는 PWM(Pulse Width Modulation)을 사용하여 DC 및 서보 모터를 제어하는 방법을 배웁니다. 이것은 따라하기 쉬운 단계별 비디오 자습서입니다. 또한 동영상 아래에서 이 튜토리얼에 필요한 부품과 동영상의 예제 소스 코드를 찾을 수 있습니다. 첫 번째 예에 필요한 구성요소 DC 모터 ........................................................... 또는 CPU 팬
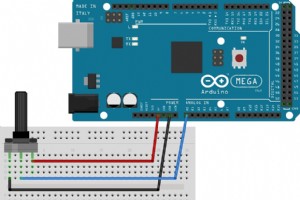
Arduino 자습서 시리즈의 세 번째 Arduino 자습서에 오신 것을 환영합니다. 이 튜토리얼에서는 Arduino 아날로그 입력 핀이 어떻게 작동하는지 배우고 전위차계와 광전지를 사용하여 몇 가지 예를 만들 것입니다. 이것은 따라하기 쉬운 단계별 비디오 자습서입니다. 또한 동영상 아래에서 이 튜토리얼에 필요한 부품과 동영상의 예제 소스 코드를 찾을 수 있습니다. 이 Arduino 튜토리얼에 필요한 구성요소 아두이노 보드 ........................................................
이 튜토리얼에서는 SimMechanics Link를 사용하여 Solidworks와 Matlab/ Simulink를 통합하는 방법을 볼 수 있습니다. Solidworks 3D 모델을 사용하여 Simulink 시뮬레이션의 예를 만들 것입니다. 동영상 아래에서 예제의 3D 모델과 Simulink 모델을 찾아 다운로드할 수 있습니다. 여기에서 예제의 파일을 다운로드하세요. Solidworks 모델 .STEP 파일: Solidworks 3D 모델 - Assembly.STEP 파일 1개 202.76KB 다운로드 Solidwork
Arduino 자습서 시리즈의 다섯 번째 Arduino 자습서에 오신 것을 환영합니다. 이 튜토리얼에서는 직렬 통신이 작동하는 방식을 배우고 이해를 돕기 위해 몇 가지 예를 만들 것입니다. 이것은 따라하기 쉬운 단계별 비디오 자습서입니다. 또한 동영상 아래에서 이 튜토리얼에 필요한 부품과 동영상의 예제 소스 코드를 찾을 수 있습니다. 이 Arduino 튜토리얼에 필요한 구성요소 아두이노 보드 ........................................................... 브레드보드 및 점프 와이
Arduino 자습서 시리즈의 여섯 번째 Arduino 자습서에 오신 것을 환영합니다. 이 튜토리얼에서는 Arduino를 Processing에 연결하는 방법과 직렬 포트를 사용하여 통신하는 방법을 배웁니다. 또한 Processing IDE를 사용하여 Arduino 보드에 명령을 보내고 그 반대의 경우도 마찬가지입니다. 이것은 따라하기 쉬운 단계별 비디오 자습서입니다. 또한 동영상 아래에서 이 튜토리얼에 필요한 부품과 동영상의 예제 소스 코드를 찾을 수 있습니다. 이 Arduino 튜토리얼에 필요한 구성요소 구성요소는 아래
Arduino 자습서 시리즈의 일곱 번째 Arduino 자습서에 오신 것을 환영합니다. 이 튜토리얼에서는 Arduino를 Matlab에 연결하는 방법과 직렬 포트를 사용하여 통신하는 방법을 배웁니다. 또한 Matlab을 사용하여 Arduino Board를 제어하는 예를 만들 것입니다. 이것은 따라하기 쉬운 단계별 비디오 자습서입니다. 또한 동영상 아래에서 이 튜토리얼에 필요한 부분과 동영상의 예제 소스 코드를 찾을 수 있습니다. 이 Arduino 튜토리얼에 필요한 구성요소 아두이노 보드 ..................
이 튜토리얼에서 우리는 로봇 그리퍼 메커니즘의 3D 모델의 PID 제어를 만드는 방법을 볼 것입니다. Simulink 모델은 두 개의 하위 시스템으로 구성됩니다. Simulink 블록을 사용하는 모델인 DC 모터 하위 시스템과 SimMechanics Link를 사용하여 Solidworks에서 가져온 3D 모델. 스텝 기능을 사용하여 DC 모터를 활성화하여 로봇 그리퍼를 구동하고 Simulink PID 블록을 사용하여 PID 매개변수를 자동으로 조정합니다. 다음 비디오를 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 여기에
이 Arduino 및 Matlab 자습서에서는 Matlab GUI(그래픽 사용자 인터페이스)를 사용하여 Arduino 보드를 제어하는 방법을 배웁니다. LED를 켜고 끄기 위한 두 개의 버튼과 광전지(광 종속 저항)의 아날로그 입력을 플롯하기 위한 축이 있는 Matlab GUI를 만들 것입니다. 이것은 따라하기 쉬운 단계별 비디오 자습서입니다. 또한 동영상 아래에서 이 튜토리얼에 필요한 구성요소와 동영상의 예제 소스 코드를 찾을 수 있습니다. 이 튜토리얼에 필요한 구성요소 구성요소는 아래 사이트에서 얻을 수 있습니다.
이 튜토리얼에서는 Solidworks에서 Spring 애니메이션을 만드는 방법을 배웁니다. 밸브와 밸브 지지 가이드 사이에 위치할 스프링의 애니메이션을 만드는 캠축 메커니즘에서 이 튜토리얼을 구현합니다. 이것은 따라하기 쉬운 단계별 비디오 자습서입니다. 또한 동영상 아래에서 캠샤프트 어셈블리의 3D 모델과 완성된 튜토리얼의 3D 모델을 찾아 다운로드할 수 있습니다. 캠축 메커니즘 어셈블리의 3D 모델을 여기에서 다운로드: Solidworks 부품 및 어셈블리 파일: 봄 애니메이션 Solidworks Files.rar 파
이 튜토리얼에서는 Solidworks에서 프로그레시브 컷어웨이 애니메이션을 만드는 방법을 배웁니다. 이것은 따라하기 쉬운 단계별 비디오 자습서입니다. 이 튜토리얼에 사용된 3D 모델을 찾아 다운로드할 수 있는 동영상을 아래에 표시하십시오. 3D 모델은 이전 게시물인 Solidworks의 Speed Reducer Animation에서 다운로드할 수 있습니다.

이 Arduino 튜토리얼에서는 A4988 스테퍼 드라이버를 사용하여 스테퍼 모터를 제어하는 방법을 배웁니다. 다음 동영상을 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. 개요 A4988은 쉬운 작동을 위해 내장된 변환기가 있는 바이폴라 스테퍼 모터를 제어하기 위한 마이크로스테핑 드라이버입니다. 이것은 컨트롤러에서 단 2개의 핀으로 스테퍼 모터를 제어할 수 있음을 의미합니다. 하나는 회전 방향을 제어하고 다른 하나는 단계를 제어하기 위한 것입니다. Driver는 풀스텝, 하프스텝, 쿼터스텝, 8스텝, 16스텝의
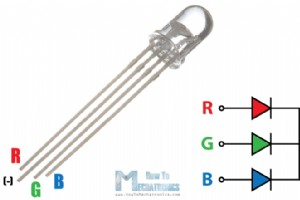
이 Arduino Tutorial에서는 RGB LED가 무엇이며 Arduino 보드와 함께 사용하는 방법을 배웁니다. 다음 동영상을 보거나 아래에 작성된 튜토리얼을 읽을 수 있습니다. RGB LED란 무엇입니까? RGB LED는 빨강, 초록, 파랑의 3가지 기본 색상을 혼합하여 다양한 색상을 낼 수 있습니다. 따라서 실제로 단일 케이스에 포장된 빨간색, 녹색 및 파란색 3개의 개별 LED로 구성됩니다. 이것이 4개의 리드가 있는 이유입니다. 3가지 색상 각각에 대해 하나의 리드가 있고 RGB LED 유형에 따라 하나의 공통 캐소
제조공정